
D'accord avec Ashira, moi aussi je ferais ça avec poulie/courroie.

219 réponses à ce sujet
#41

Oracid
-

- Modérateur
-

- 7â¯030 messages
Pilier du forum
- Gender:Male
#42
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 05 décembre 2016 - 08:32
J'y ai pensé ^^. Pour la précision de la position de la tourelle. Je me suis même dit que ce serait l'occasion d'y placer un pas à pas.
Ce qui m'a arrêté, c'est que je n'ai pas eu envie de rebrancher l'imprimante pour me faire la poulie qui va bien sur mon profilé. Je garde ça dans un coin de ma tête. Pour la cas où le montage avec le servo est vraiment trop imprécis.
Merci pour vos remarques.
#43
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 14 janvier 2017 - 12:28
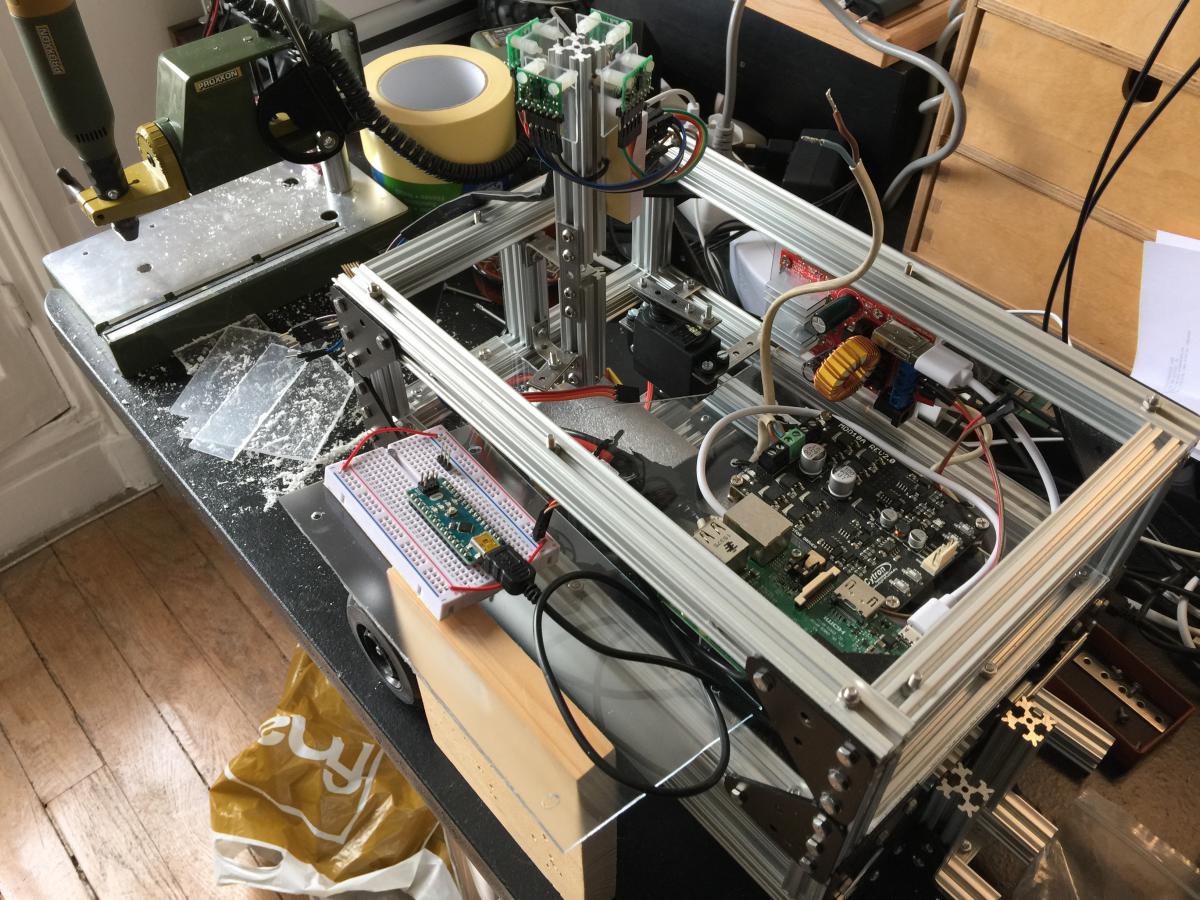
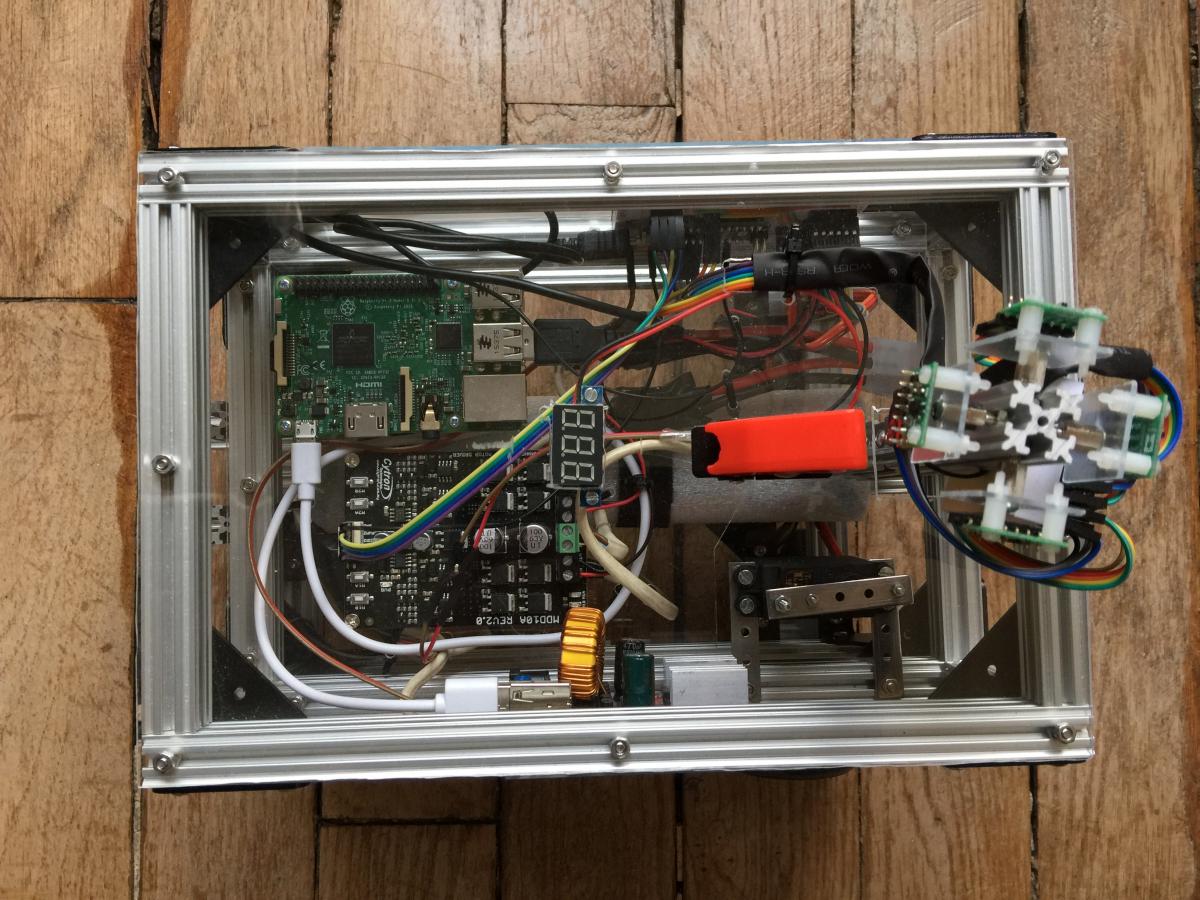
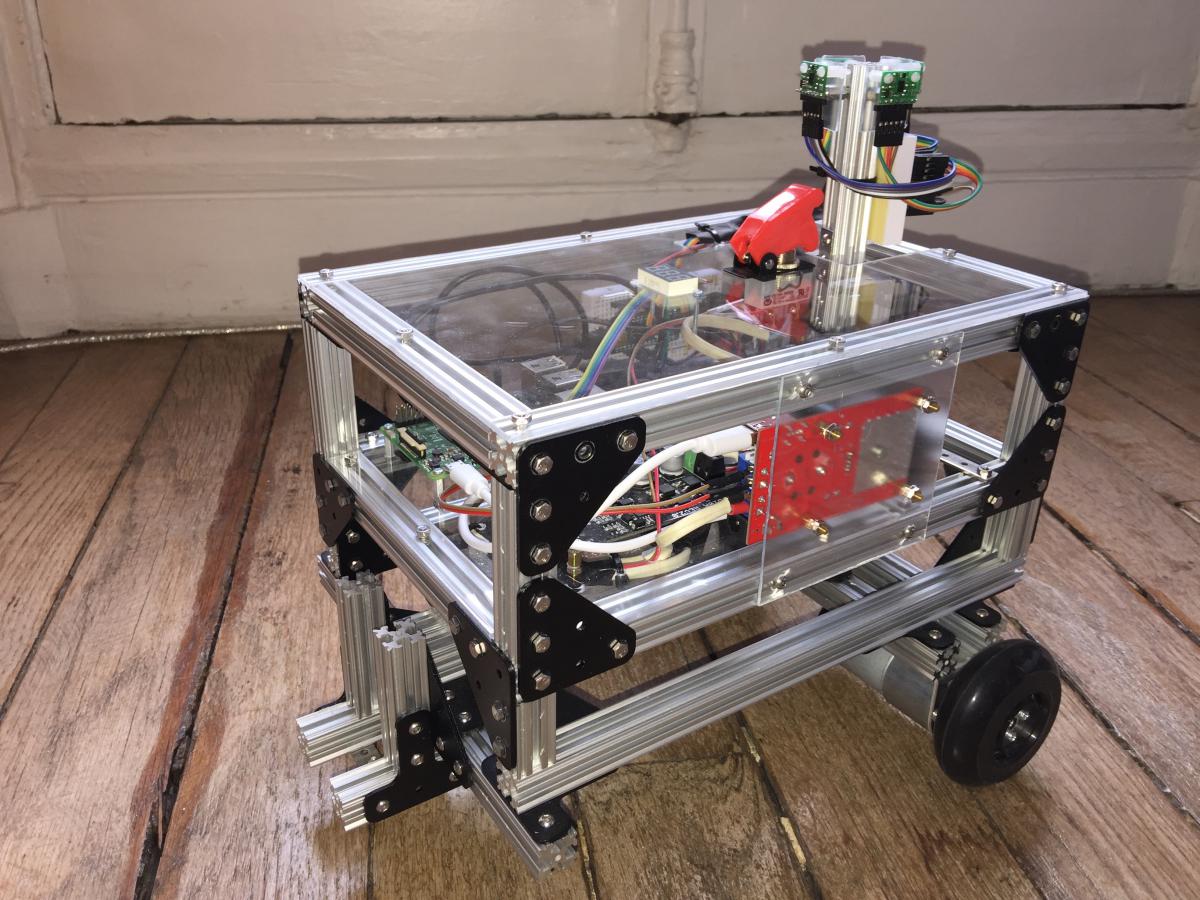
Des nouvelles de l'assemblage.
J'ai découpé le plexiglass :
- dessus (le capot), support de l'interrupteur général et du voltmètre. J'ai encore la place d'y mettre un écran pour afficher ce qu'il voit.
- dessous, étage intermédiaire entre la batterie et le corp. Support du raspberry et du pont en H.
- sur 2 cotés pour le breadbord et l'alimentation 5V.
Il me reste à câbler et coder.
Les câbles qui descendent de la tourelle vont pousser le bras mécanique dans un sens, ce qui devrait limiter le jeu.
Si la mécanique de ma tourelle n'est pas suffisamment précise, je verrai autre chose. 
#44
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 14 janvier 2017 - 04:10
C'est quoi le robot ? C'est quoi l'établit ? 
Ma chaine YouTube : https://www.youtube..../oracid1/videos

#47
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 28 janvier 2017 - 05:53
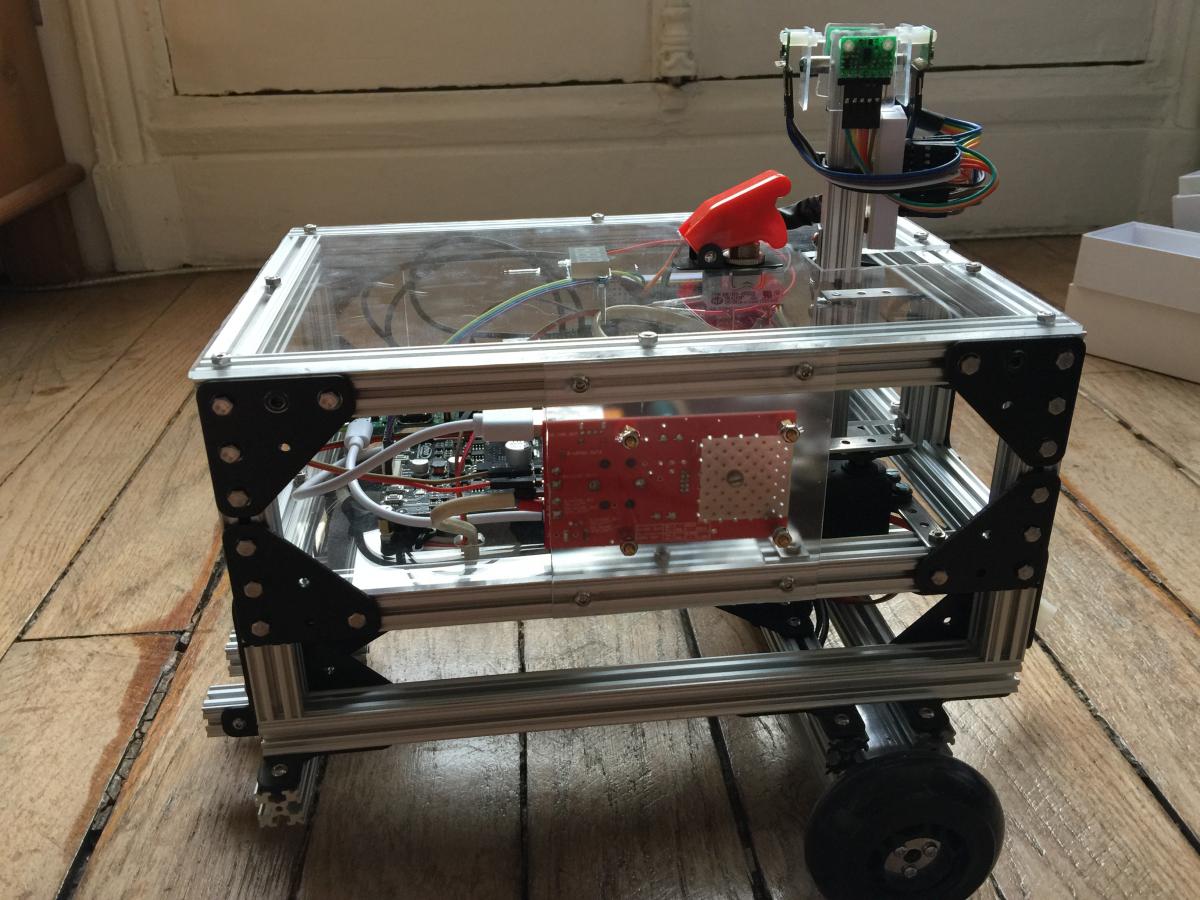
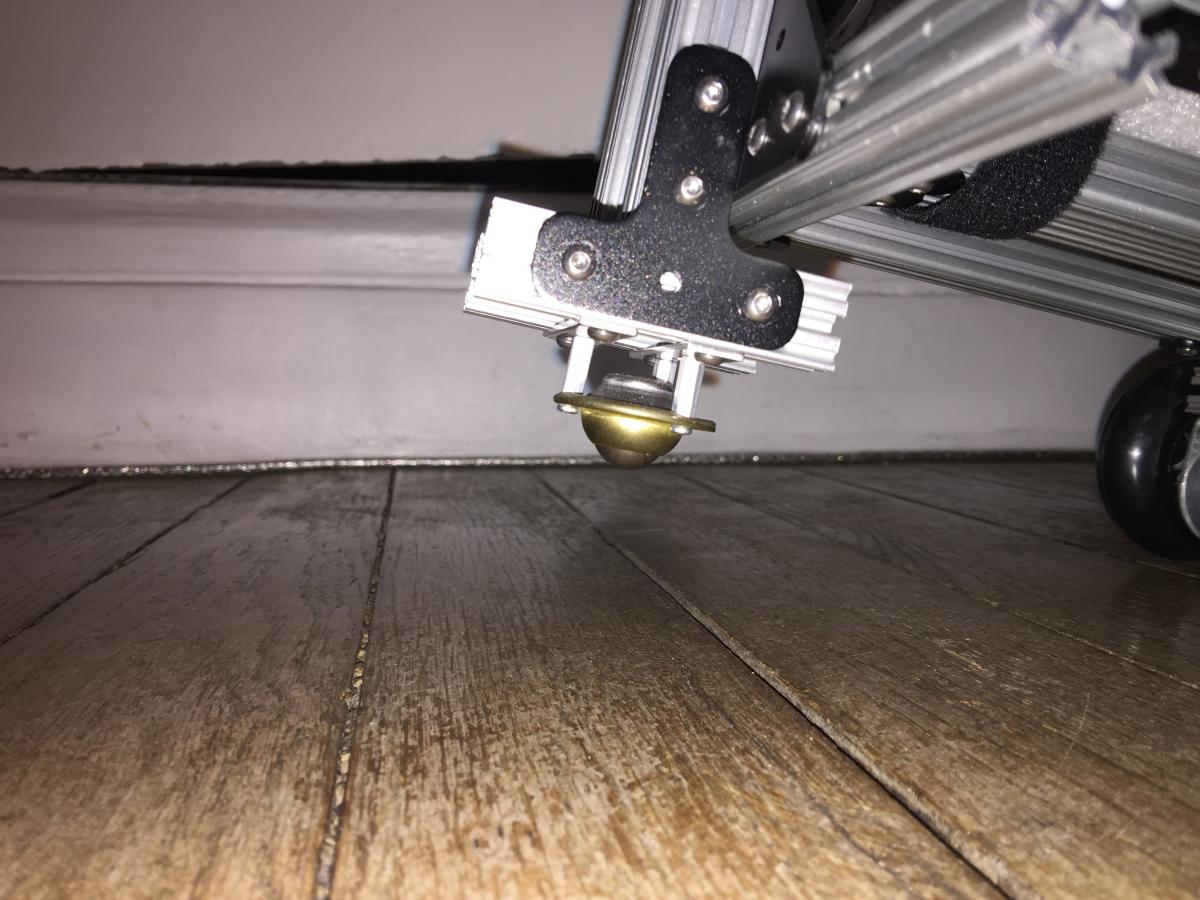
Une petite roue à l'avant, peut-être?
À moins qu'elle soit cachée.
À moins qu'elle soit cachée.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#49
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 28 janvier 2017 - 07:37
Tu vas te faire engueuler.Tu penses bien que je peux pas rayer le parquet
Ce genre de roue ça grave bien le parquet.
Ma chaine YouTube : https://www.youtube..../oracid1/videos

#51
zavatha
-

- Membres
-
- 233 messages
Membre occasionnel
- Gender:Male
Posté 08 avril 2017 - 10:24
ça dépotes
as tu abouti ?
@+
zav
#52
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 08 avril 2017 - 10:47
Hector est là, il me supplie souvent de m'occuper de lui mais il ne fait pas le poids face à son petit frère Emile.
J'ai merdé la conception de ma tourelle. Je ne trouve pas de moyen de convertir l'angle de mon servo en angle de ma tourelle. Je pensais appliquer un facteur linéaire mais ça me donne de fausses mesures. Du coup je suis resté la dessus. J'ai pas avancé sur l'odométrie. Je reviendrai dessus.
J'ai merdé la conception de ma tourelle. Je ne trouve pas de moyen de convertir l'angle de mon servo en angle de ma tourelle. Je pensais appliquer un facteur linéaire mais ça me donne de fausses mesures. Du coup je suis resté la dessus. J'ai pas avancé sur l'odométrie. Je reviendrai dessus.
#53
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 09 septembre 2017 - 04:04
La mécanique de ma tourelle ne donne rien de bon. Je n'arrive pas à avoir une relation linéaire entre l'angle du servo et l'angle de la tourelle. Il y a certainement un moyen mathématique d'établir cette relation. Je n'ai pas continué sur cette voie puisque le servo n'est pas du tout assez précis pour ce que je veux faire.
Comme j'ai récupéré des pas à pas de feu mon imprimante 3D, et que Oracid m'a si sympathiquement envoyé son driver, je vais explorer ces moteurs que je connais pas. Je me dit que 200 échantillons de distance dont l'angle est connu et plus précis (si j'en crois ce qu'on dit de ces moteurs) ça suffira bien pour obtenir cette cartographie.
#54
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 09 septembre 2017 - 08:22
La prise de vue est un peu serré. J'ai du mal à avoir une vue d'ensemble.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#55
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 09 septembre 2017 - 10:46
#56
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 10 septembre 2017 - 07:02
Désolé...
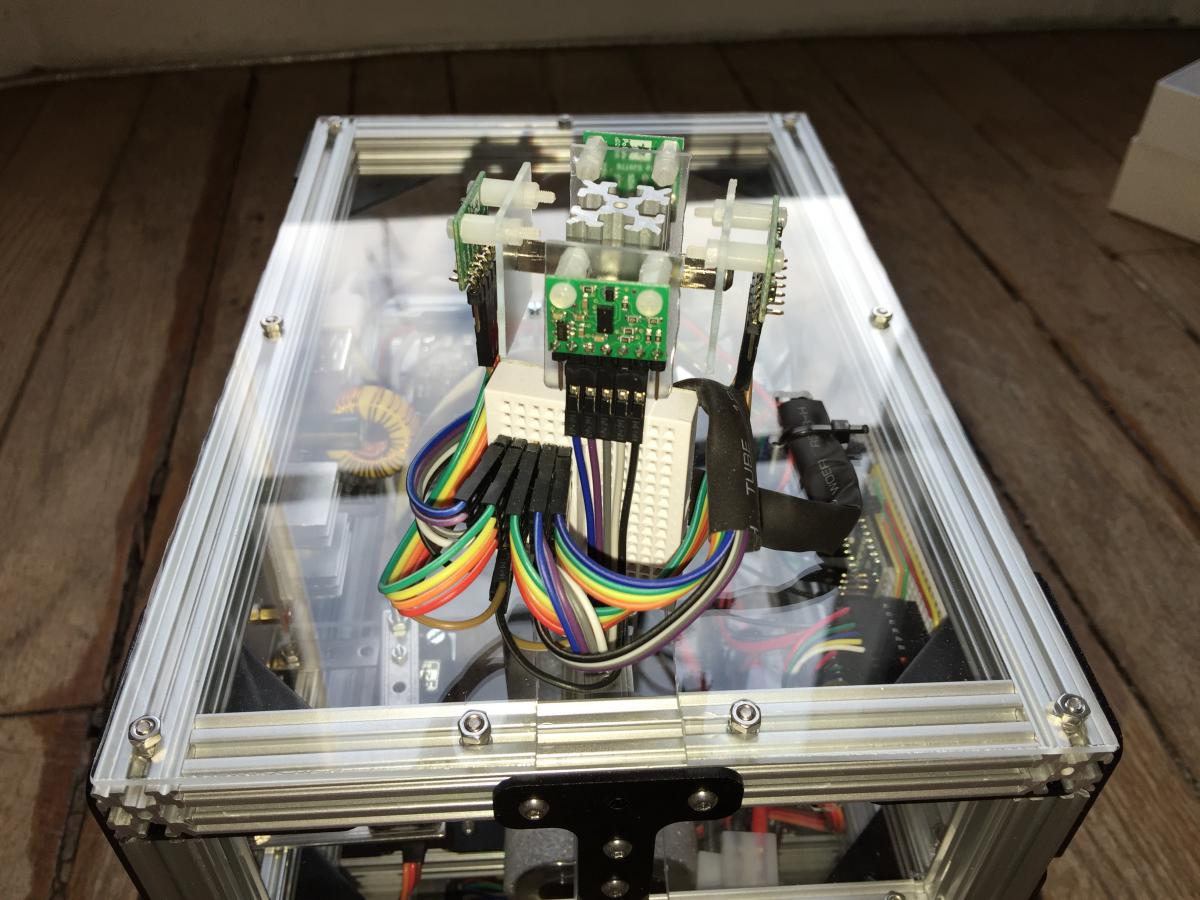
Le bras (palonnier) de ton servo et le bras de la tourelle ne sont pas parallèles parce que le fer qui les relie est trop court.
Je ne sais pas si le problème vient de là, mais je pense que ton parallélogramme devrait être légèrement amélioré.
Je pense qu'alors, tu appréhenderais mieux le problème.
Le bras (palonnier) de ton servo et le bras de la tourelle ne sont pas parallèles parce que le fer qui les relie est trop court.
Je ne sais pas si le problème vient de là, mais je pense que ton parallélogramme devrait être légèrement amélioré.
Je pense qu'alors, tu appréhenderais mieux le problème.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#57
Telson
-

- Membres
-
- 975 messages
Membre passionné
- Gender:Male
- Location:Punaauai - Tahiti
Posté 10 septembre 2017 - 09:08
Tu n'arrives pas à obtenir une relation linéaire entre l'angle du servo et l'angle de la tourelle : Si j'ai bien compris lorsque le servomoteur effectue une rotation de X°, tu n'obtiens pas une rotation de la tourelle de X ° MAIS DE X° +/- delta ?!
Si c'est le cas c'est qu'il existe une démultiplication certainement dû à la différence de longueur des segments.
Tu pourrais peut être aussi utiliser deux poulies crantées (de ton ex I3D ayant même diamètre). Une fixée sur l'axe du servo et une fixée sur l'axe de ta tourelle + une courroie pour éviter d'utiliser ce type de renvoi d'angle
Il te faudrait aussi rallonger l'axe à l'arrière de ta tourelle et le faire pivoter dans un roulement ou douille en bronze pour éviter les tremblements.
En espérant t'aider.....

#59
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 10 septembre 2017 - 01:30
Merci, ça fait trop longtemps que je rame avec ce pb. Sur la video, c'est le meilleur compromis de distances des bras que j'ai pu avoir. J'ai quand même réussi à avoir une amplitude de 90° sur la tourelle. Et je me suis dit que trouverai bien la solution mathématique pour retrouver des murs droits à partir des relevés. Le principale pb est le servo. Il n'est pas du tout adapté à ce type d'exercice : pas assez précis. J'ai donc mis ce pauvre Hector en pause. Jusqu'à aujourd'hui. Je vais monter ma tourelle directement sur un pas à pas.
Le test d'Ashira m'aide beaucoup http://www.robot-maker.com/forum/topic/10650-driver-bl-tb6560-teste-par-ashira/
Et merci à nouveau à Oracid ^^
Le pas du moteur est de 1,8°. Positionné en 16e de pas, j'ai une résolution de 800 mesures par secteur de 90° pour ma tourelle.
Soit une erreur de de 3,9 mm au bout de la distance que le capteur peut mesurer.
Je n'ai pas besoin de tant de précision. Je diminuerai certainement cette précision pour accélérer la rotation. Et pas besoin de démultiplier mécaniquement, c'est largement suffisant en direct.
Le driver chauffe pas du tout (1,2A) mais le stepper chauffe bien !! J'avais pas fait gaffe à ça quand il était sur l'imprimante.
Je kiffe toujours
- Mike118 aime ceci
#60
gerardosamara
-

- Membres
-
- 374 messages
Habitué
- Gender:Male
- Location:Costa Rica & Bretagne
- Interests:La vie sous les tropiques
Posté 10 septembre 2017 - 03:42
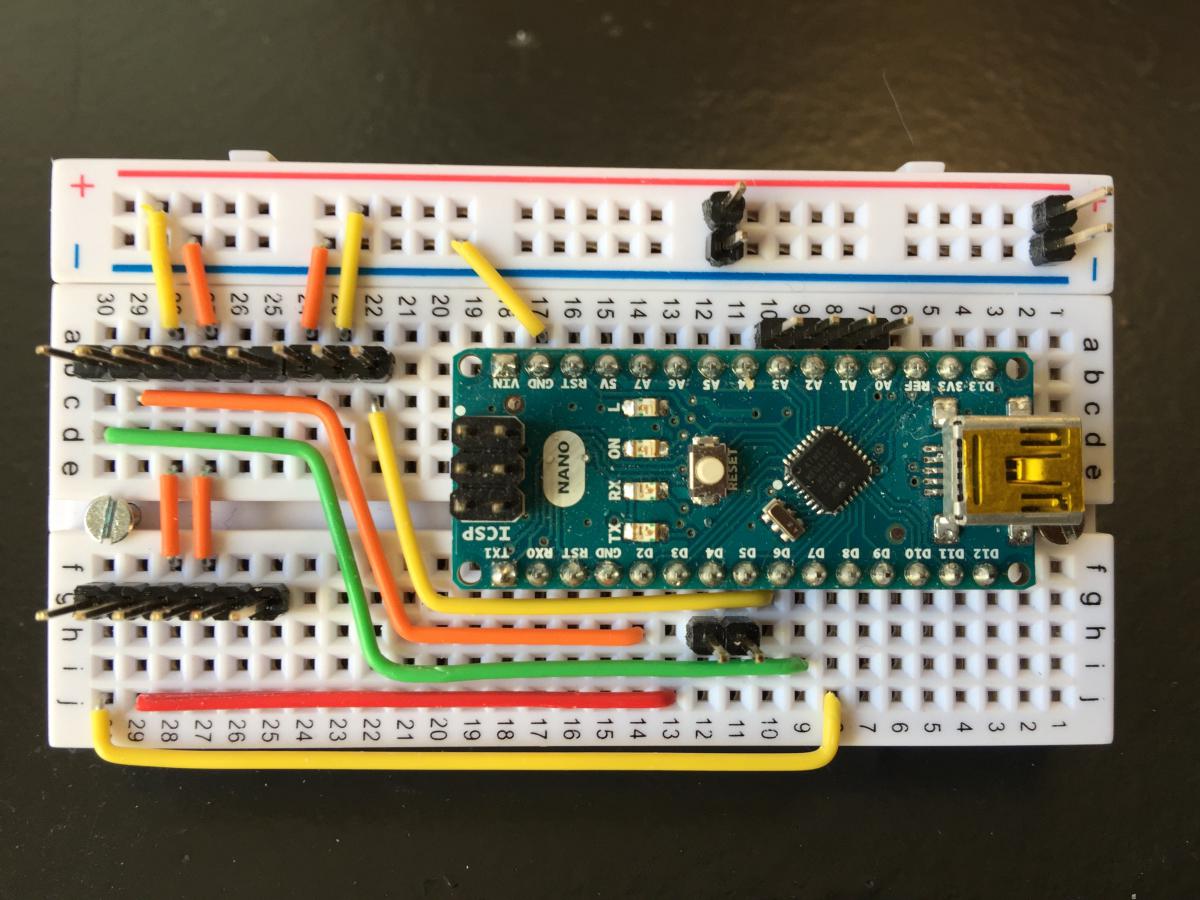
Dans le chassis, un autre arduino servira à piloter les 2 moteurs CC et compter les interruptions des roues codeuses.
Le raspberry devra piloter 2 arduinos via usb. Je sais que cela fonctionne bien pour un arduino. Pour 2 je sais pas. Je vais check ça rapidement. Sinon, je vais devoir adapter les 3.3V du raspberry pour faire du SPI. Pas envie
33.gif
Tu utiliseras des ports USB différents sur le RPI avec une adresse d'ouverture de port forcément différente au niveau du script python , par ex
ser = serial.Serial("/dev/ttyACM0", 9600)
ser1 = serial1.Serial("/dev/ttyACM1", 9600)
puis lecture arrivée caractères sur les 2 ports USB
x = ser.read()
y = ser1.read()
et écriture
ser.write(str)
ser1.write(str)
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
Répondre à ce sujet









Aussi étiqueté avec au moins un de ces mots-clés : VL53L0X, Odomètrie, RPLIDAR A2, Arduino Due



1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




