Voilà quelque nouvelles du projet. Je voulais explorer ce monde de la robotique amateur. Je suis servi. Je fais beaucoup de détours et de parenthèses. Elles sont passionnantes mais quant à l'atteinte de l'objectif et du kiffe qui va avec, il faut savoir garder la foi.
Quand je trouve un moment tranquille pour m'en occuper, je me rend compte que je mets 2h pour me replonger dedans. C'est pas immédiat. Ça réduit pas mal mon efficacité sur le projet. Bon c'est pas chiant du tout mais ça ralenti encore quand on a pas beaucoup de temps à la base.
Je suis passé par une petite recherche de suppression du pid. Ou une solution pour contourner le réglage des 3 constantes du pid. http://www.robot-maker.com/forum/topic/12192-se-passer-de-pid/
ça vaut ce que ça vaut. C'est à dire un compromis de plus. Mine rien, je commence à les accumuler ces compromis. Et ça fait baisser mon kiffe pour ce robot !!! C'est pas bon. J'aime pas ça les compromis. Il y a ce contrôle de vitesse sans pid, la communication série en ascii, le sur-dimensionnement des composants un câblage avec breadboard. Si un jour j'ai une version finale d'un robot, je commanderai un PCB quelque part  Idem, pour le sur-dimensionnement, je mettrai peut-être la logique et le câblage des 2 nanos dans la mega. Cela simplifiera le robot.
Idem, pour le sur-dimensionnement, je mettrai peut-être la logique et le câblage des 2 nanos dans la mega. Cela simplifiera le robot.
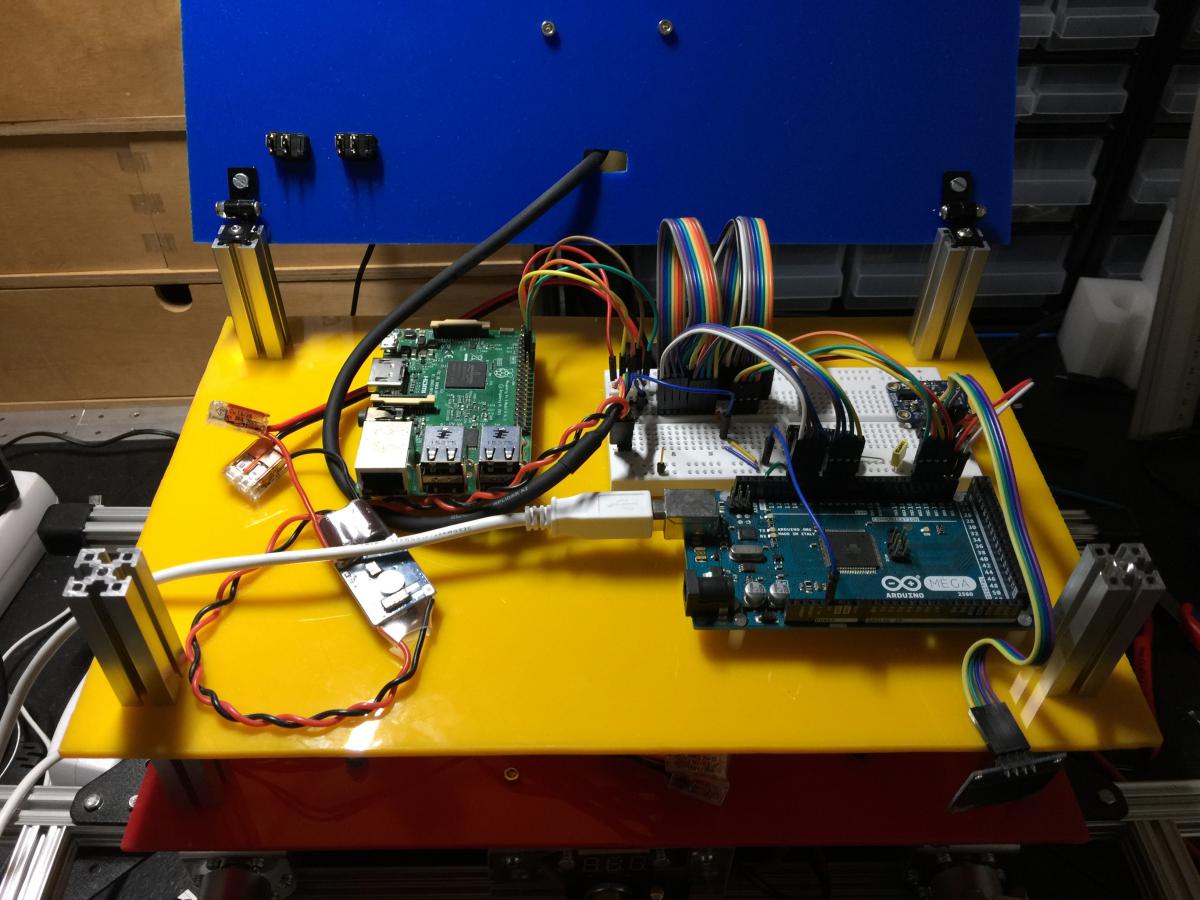
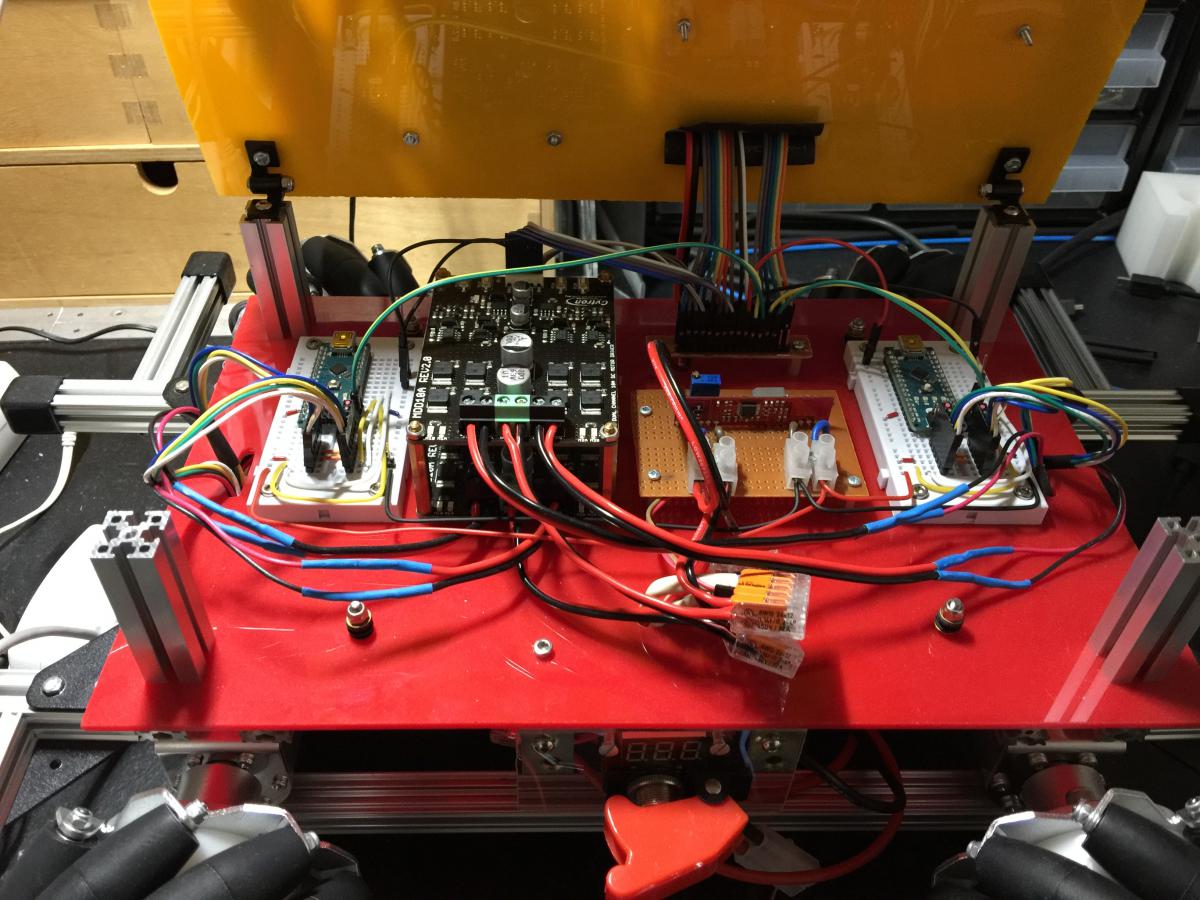
J'ai failli avoir un compromis de plus avec l'alimentation. Du moins, il m'est arrivé un truc que j'attendais pas. Le robot est câblé à 100%. Mon alim (une batterie 12V et un conv. CC 12-5V 16A) fournit du 5V aux 3 arduinos, aux 4 encodeurs, à l'écran et à l'imu. Pour alimenter le raspberry et le lidar, je comptais reprendre le 5V qui passe 2 breadboard, un nano, une nappe pour changer d'étage. Mais surprise, je n'ai plus 5v mais 3,8 V ... J'ai omis ce que je crois être une bonne pratique : repiquer le courant à la source, le plus près possible de la source. Je tire un câble 5V en sortie du convertisseur CC. Rien à faire, la tension n'est pas suffisante pour alimenter le raspberry. Sachant que le convertisseur peut en théorie sortir 16A, je n'ai toujours pas compris. Je veux bien que mes câbles aient une résistance interne mais quand même. Le plus long mesure moins de 20 cm. J'ai re-contrôlé le câblage à la recherche de court-circuit. Rien. Je suis remonté à la source 12V et j'ai ajouté un petit UBEC du shop. Et là c'est bon. J'ai pas compris. Je suis pas doué pour alimenter un robot autonome. Voir Emile ^^ Le compromis dont je parlais c'est que j'ai failli ajouter une 2eme batterie pour alimenter le raspberry et le lidar.
Le niveau de kiffe est supérieur à la somme des anti-kiffes. Bref, je suis toujours dessus.