
Ben si, j'ai 2 types de suspension.
Un châssis souple pour que les 4 roues soient bien plaquées au sol.
Et pour les vibrations, j'ai mis des petits amortisseurs que tu vois juste au dessus. Entre le châssis et le premier étage du boitier.

Made By Humans

Posté 11 mars 2018 - 07:24
Ben si, j'ai 2 types de suspension.
Un châssis souple pour que les 4 roues soient bien plaquées au sol.
Et pour les vibrations, j'ai mis des petits amortisseurs que tu vois juste au dessus. Entre le châssis et le premier étage du boitier.
Habitué

Posté 11 mars 2018 - 08:10
Ah oui nickel j'avais pas vu la vidéo !
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
Staff Robot Maker

Posté 20 avril 2018 - 08:31
ça semble sympa
Le collecteur tournant il est dispo ?
Oui il est dispo collecteur tournant ... ( j'ai mis du temps à répondre dis donc ... )
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Made By Humans
Posté 20 avril 2018 - 08:56

Made By Humans
Posté 22 avril 2018 - 12:26
Quelques nouvelles de mon Hector.
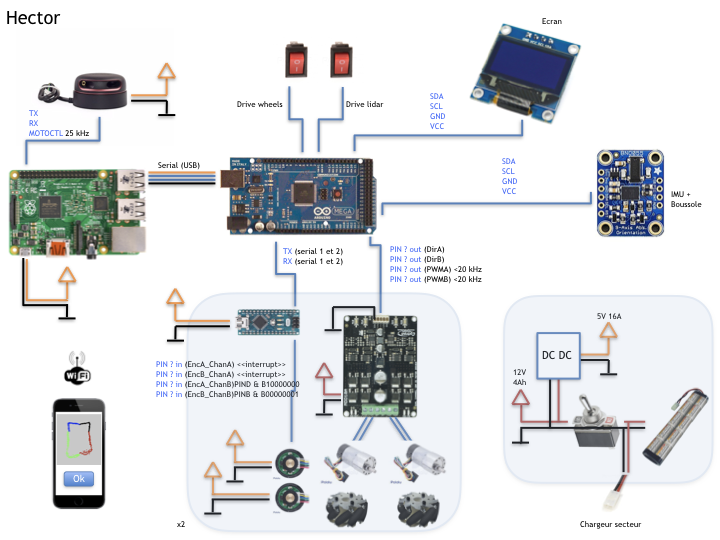
Le premier étage (le rouge) est terminé. Assemblage, câblage, code. Le 12V reste sur cet étage. Le 5V remonte au dessus. Remonte aussi les 4 vitesses des roues.
J'attaque le 2e étage le jaune. Le mega doit redescendre les commandes des moteurs. Au passage, il doit aussi prendre les commandes arrivant du raspberry.
Hier je butais sur un problème très bête. Les nano du 1er étage envoient la vitesse toutes le 100 ms. Quand je debug, branché en usb, on a l'habitude de voir les leds tx et rx qui indiquent qu'il cause bien. Quand l'usb est débranché et qu'on ne passe plus que par les pin tx et rx, ces 2 led ne fonctionnent plus. Et c'est normal, c'est dans la doc de l'arduino. Ne le sachant pas, j'ai cru pendant un bon moment que la transmission ne fonctionnait pas. A cela s'ajoutait d'autres pb sur la mega en réception qui sont de l'ordre de l'interface clavier-chaise. Bref, tout ça pour dire que les led tx et rx du nano ne s'allument que pour l'usb.
Bref, j'avance.
Habitué
Posté 22 avril 2018 - 01:44
Pb d'ICC mdr !!!
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
Habitué
Posté 29 mai 2018 - 07:57
Hop good new ils ont pondu une MAJ du firmware RPLIDAR A2 pour supporter le 8K sur le même hardware:D
Je vais tenter cette semaine.
http://www.slamtec.com/cn/Support#rplidar-a2
https://wiki.slamtec...pageId=16154735
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
Made By Humans
Posté 24 juin 2018 - 12:53
Voilà quelques nouvelles de l'avancement. Oui, oui, je suis toujours dessus. Et ça avance pas vite vu le peu de temps que j'ai.
Le 1er étage étant fini, je suis sur le 2e. Le raspberry est à 50% et je viens de finir le mega.
J'ai fini le code du mega. https://github.com/P...ster/controleur
Algo mecanum  omnidirectional.pdf 1,88 Mo
215 téléchargement(s)
omnidirectional.pdf 1,88 Mo
215 téléchargement(s)
Il accepte les commandes venant du raspberry : strafe dans telle direction et /ou tourne sur la gauche ou la droite.
Il détecte les chocs et transmet l'info au raspberry.
Je me suis encore bien fait chier avec le réglage du PID ... C'est une vrai merde cet algo. Je connais pas mieux mais quelle merde à configurer. vraiment.
Il affiche des infos sur le petit écran.
L'étage 2 est prêt à recevoir les commandes. Il me reste à définir ces commandes donc à mettre de l'intelligence dans le raspberry. Il doit le faire en fonction du nuage de points captés par le lidar. (Lidar toujours en 4K et je crois qu'il va le rester). Mon premier objectif est de s'éloigner des obstacles que je lui mettrai tout en évitant les murs.
Staff Robot Maker
Posté 24 juin 2018 - 01:18
Je viens juste de comprendre que tu utilisais deux nano pour piloter deux moteurs et que la mega est le master de ces deux nano !
C'est marrant c'est exactement le même genre de configuration qui j'ai mis sur le robot octopus V0.
Cette cascade de master slave =)
EDIT : en fait non je me suis trompé c'est pas exactement pareil ^^
Moi c'est les slave de plus bas niveau qui gérait les moteurs toi c'est un niveau au dessus avec la méga =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Habitué
Posté 24 juin 2018 - 01:47
Mais c'est quoi cette bouïne moi j'arrive à tout caser sur un arduino 8 bits 16MHz : la lecture des 4 encodeurs, la génération des 4 PWM, l'asservissement PID de tout ça, et l'odométrie + le protocole de trame radio temps réel à faible latence. et ça fonctionne absolument aussi bien que sur un PIC32 que j'ai mis uniquement pour traiter des milliers de points lidars et faire l'autopilote avec jojo.
Niveau charge CPU un seul arduino peux virtuellement gérer une dizaine de robots en pilotage manuel avec odométrie et asservissement et protocole faible latence.
EDIT : il suffit de quelques pages de code C pour un robot MECANUM complet asservi, odométriesé et pilotable via télécommande...
L'arduino peux aussi gérer une centrale inertielle complète en plus de tout ça... la preuve mes drones volent très bien:)
Le PIC32 80MHz c'est uniquement pour le défi de l'autopilote au lidar !
EDIT2 : avant que je connaisse jojo j'avais tout ça sur l'Arduino + la lecture de 8 capteurs ultrasons PWM et 12 télémètres infrarouges linéarisés + lecture courant + tension batterie. C'était le premier robot mecanum en ligne.
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
Made By Humans
Posté 24 juin 2018 - 03:19
Hé j'odomaîtrise comme je veux, comme je peux.  Comme tu vois, j'aime bien prévoir large
Comme tu vois, j'aime bien prévoir large
Dans mon code, il y a un truc qui n'est pas optimisé du tout. Je te le dis avant que tu ne bondisse de ta chaise ^^ C'est tout ce qui concerne la com série. J'utilise un encodage ascii. C'est très pratique pour la séparation des trames. (\n) Et pour la séparation des informations dans les trames. C'est très mal en cpu pour le décodage. Pas de binaire => de union ^^ Mais un parsing de string bien lourd. J'ai été formaté très jeune à ne pas aimer les commandes 'magiques'. A préférer le Keep It Silly Simple (KISS), pour que limite, le code n'est pas besoin de commentaire. Ok, ce n'est pas compatible avec l'embarqué où on va préférer compter les octets. D'où ma tendance à surdimensionner. Je prévois large aussi car c'est principalement de l'exploration. Je prévois de la marge pour les trucs qui pourraient venir après. ça m'évite de revoir la mécanique et l'électronique en cours de route.
C'est pas optimisé, c'est mon kiffe !!
Habitué
Posté 24 juin 2018 - 03:31
lol. Mais 16MHz pour faire de l'odométrie mecanum c'est très très très très très très large.
Et des trames binaires c'est largement plus K.I.S.S que de l'ASCII caca !
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
Staff Robot Maker
Posté 24 juin 2018 - 03:32
KISS c'est très bien C'est ce qu'on fait aussi ! Et dans l'ensemble on fait suffisamment claire pour qu'il n'y ait pas besoin de commentaire ( surtout que le code n'est pas prêt à être release ... )
Par contre un union c'est très simple et ça a rien de magique ! =)
Le parsing de string c'est une méthode lourde et qui a ses limites certes mais efficaces et simple à mettre en place car les outils sont déjà existant ... C'est comme ça que j'ai commencé moi aussi au début ... et j'ai évolué quand j'ai eu besoin d'évoluer =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Habitué
Posté 24 juin 2018 - 03:37
la vache mais quelle idée de commencer en ASCII avec un système haut niveau or qu'il est plus simple et logique de comprendre des octets 8 bits et des mots 16 bits pour les types bas niveau.
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
Staff Robot Maker
Posté 24 juin 2018 - 03:52
Il est plus simple de faire du haut niveau " interprétable faciliement " par l'utilisateur lambda ... surtout quand les fonctionnalités bas niveau qui décodent la trame existe déjà et sont déjà faite ... Il y a zéro dev à faire, et très peu de choix à faire, genre définir le start, le séparateur et le fin de trame .
Exemple concret avec cette trame: $123,200,0,115;
Tout utilisateur lambda comprend facilement que "$"c'est le start de la trame, qu'il y a 4 valeurs séparé par le séparateur ", "et que le fin de trame est ";" ...
Et le code qui permet de récupérer les différentes valeurs d'un point de vue plus bas niveau existe déjà ... "readStringUntil " ...
C'est justement le but du haut niveau de faire des couche d'abstraction qui simplifient l'ensemble ... Et là les couches ont déjà été faites ...
Après d'un point de vue flux de donnée c'est sur que c'est pas optimisé... mais d'un point de vue dev c'est très simple ...
Ce qui est plus simple est plus logique pour certains ou certaine ne l'est pas forcément pour d'autre, il n'existe pas qu'une seule et unique façon de penser ou de voir les chose...
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Habitué
Posté 24 juin 2018 - 03:55
En dehors de devoir prévoir l'espace des données... le binaire c'est peu de complexité de dev supplémentaire pour beaucoup d'optimisation
EDIT : au final c'est le même boulot car il faut forcément maîtriser les type des données reçues pour pouvoir les utiliser dans les algos donc zéro pointé le protocole ASCII... Quitte à faire une couche d'abstraction autant faire des trames binaires de longeur variable avec séparation du modèle de données
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)
Made By Humans
Posté 24 juin 2018 - 03:59
Je vous avais dit que vous alliez bondir ^^
Promis, dès que c'est stabilisé, je figerai les trames de ces com avec un joli struct et un union Mais il y aura toujours des séparateurs.
Y a rien de magique on est d'accord. La magie disparaît quand le code est lisible et compréhensible. Chacun sa montagne !! La compréhension est relative à chacun.
Ha on se refait pas que voulez-vous.
Habitué
Posté 24 juin 2018 - 04:13
Puis sur un Arduino faut tant que possible bosser en 8-bits types uint8_t ou int8_t et utiliser le wrap:)
Make your own raspberry robot, control it over the internet in FPV mode with super low latency and securely share access on it to your friends with Vigibot.com! You are welcome to test our robots now!
https://www.vigibot.com(100% free, no ads)









0 members, 1 guests, 0 anonymous users





