Ça a l'air intéressant ! Faut prendre le temps de bien lire pour comprendre ce qu'il fait.
Tu as regardé les systèmes time of flight ? C'est une autre technique que la stéréo vision, je trouve ça impressionnant niveau vitesse pour traiter les informations!
Non le projet n'est plus tout à fait en stand by. Pour avancer plus vite je simplifie mes idées de départ sinon ça mènera à rien.
Pour l'instant il n'y a pas de quoi faire un post, mais bientôt le titre du sujet collera + avec le contenu
Non, je ne connais pas du tout, en regardant vite fais sur google.
Traduction google :
Robotique
Une autre utilisation de ces caméras est le domaine de la robotique: robots mobiles peuvent mettre en place une carte de leur environnement très rapidement, ce qui leur permet d'éviter les obstacles ou suivre une personne de premier plan. Comme le calcul de la distance est simple, que peu de puissance de calcul est utilisé.
Après avec se système, peut on :
- faire de la reconnaissance de visage, des mains, des yeux etc etc
- reconnaître les couleurs.
- calcul des distances.
- les système comme OpenCV fonctionne t'il sur ce genre de technique, ou alors existe t'il un logiciel équivalent.
- une ou deux caméras.
etc etc
Ce sont des questions (de noobs) qui me viennent à l'esprit.
Apparemment la lumière " " peut être un problème par moment pour se procéder.
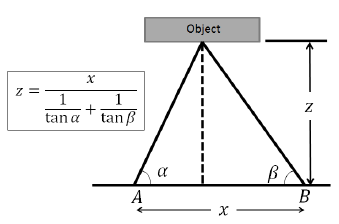
On voit ici la vision stereo et le TOF.
Faut voir, j'imagine que tu a du regarder un peu déjà se système, tu en pense quoi, TOF ou vision stéréoscopique ??
Car c'est sur, moins d’algorithme avec le TOF donc moins de calcul, mais j'ai l'impression que c'est limité. (d'ou mes questions un peu plus haut).
Le tof c'est comme ce que fait la chauve-souris mais avec de la lumière. Les capteurs sont chaque pixels d'une "caméra", ça mesure le temps que met un signal lumineux (infrarouge) pour aller de la source à l'objet puis de l'objet aux capteurs. De la tu peux calculer directement la distance avec la vitesse de la lumière.
Du coup pour avoir en même temps des couleur sur l'image je pense que c'est couplé à un autre capteur vidéo.
J'ai vu aussi qu'il y en aurait bientôt dans les smartphones? Ce sera de plus en plus accessible !
Je sais pas laquelle est la meilleure. Ça dépend aussi des cameras que tu utilises etc.
D'ailleurs j'ai vu quelque chose qui m'intéresse bien dans ton lien :
Je fais un peu différemment je crois, ce sera intéressant de comparer !
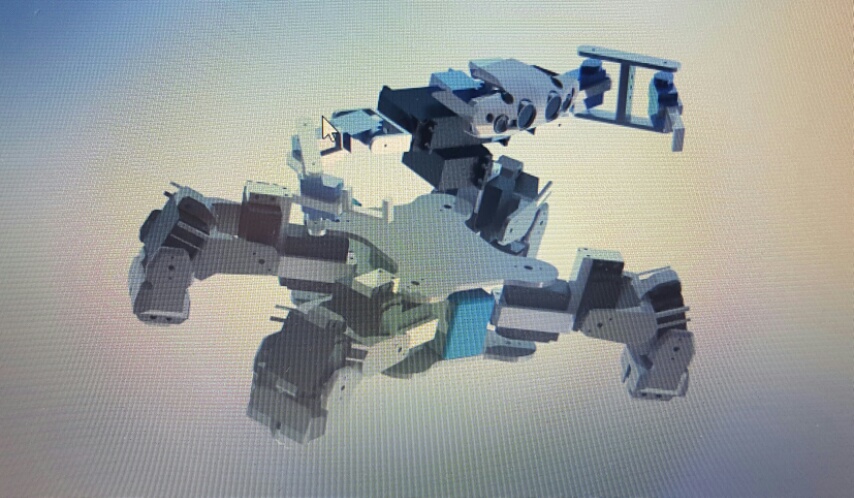
Bon voilà, j'ai repris la construction de ce robot mais avec beaucoup moins de contrainte. J'essai de moins m'attarder sur l'allure du robot pour aller plus vite, ça donne ça:
Enfin un quadrupède !^^
La tête et la base sont modélisées, il manque le corps et les bras.
Chaque patte a 3 degrés de liberté, j'ai hésité à en mettre 4 mais j'essaie d'abord avec 3.
Au bout que chaque patte il y a un petit détecteur de contact avec le sol.
Au niveau de la tête: un capteur us, 2 cameras et 2 leds rgb.
Avec cette morphologie j'ai un peu peur que le haut du corps soit secoué dans tous les sens pendant la marche. Je vais essayer de lui mettre 3 degrés de liberté au corps + un gyro pour compenser.. enfin je sais pas^^
Et enfin les bras avec des petits servos, 4 degrés de liberté idéalement. Pas de "mains" de prévues, mais 2 lasers de 1w en livraison, je devrai les recevoir bientôt.
Pour finir une petit vidéo de depth map
On peut a peine distinguer des formes mais ça fonctionne. Enfin pas assez pour attaq... éviter des poules
Ah ah ahhhhh c'est classe dis donc, une central inertiel au niveau de la tête serait pas mal pour la garder au même degrés durant la marche ou autre...
Le but c'est qu'il puisse agir sur son environnement de manière assez simple, du coup je compte le faire jouer avec des balles.
Les lasers je vais les mettre au bout des bras, pour claquer des ballons de baudruche par exemple.
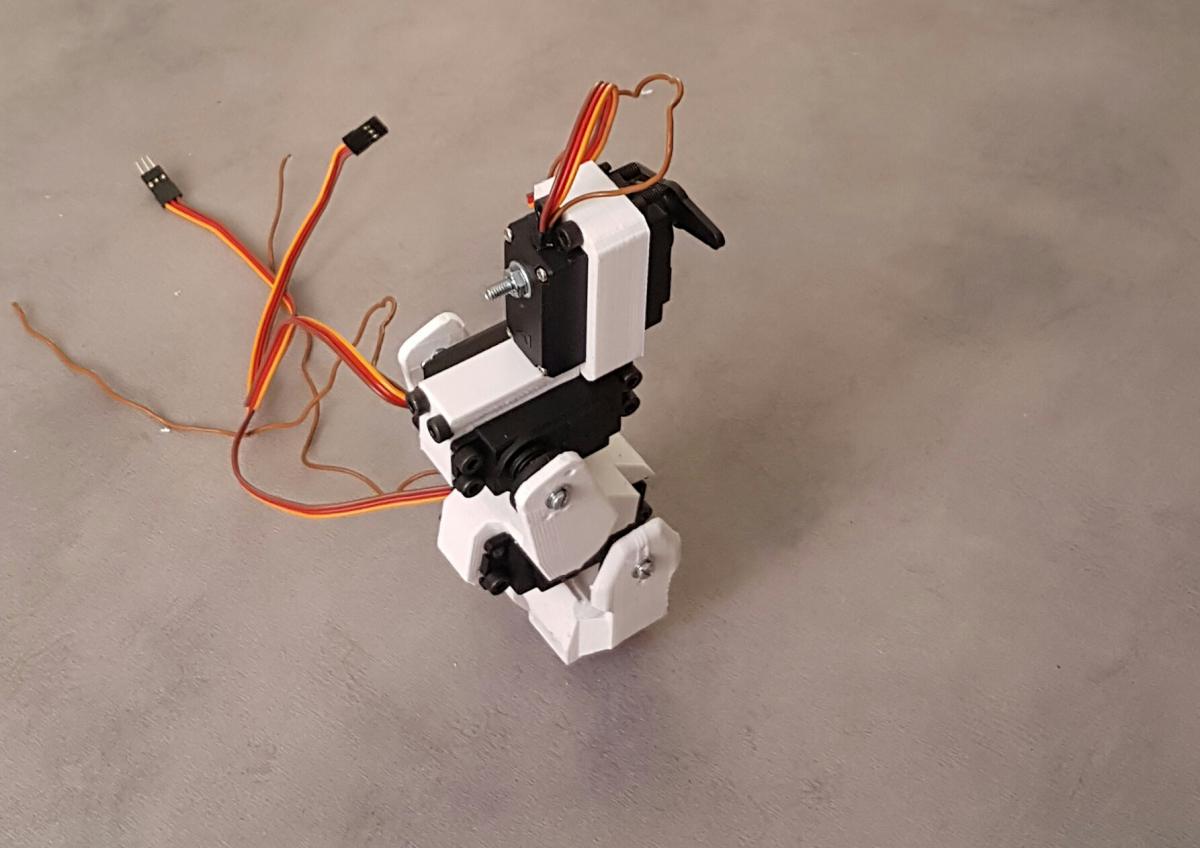
Quelques avancées, pas de quoi faire des bons^^ juste physique:
Voilà comment je pense ajuster le torse avec la base de quadrupède
Depuis la dernière modélisation j'ai fait apparaître les bras, on voit déjà mieux à quoi il pourrait ressembler!
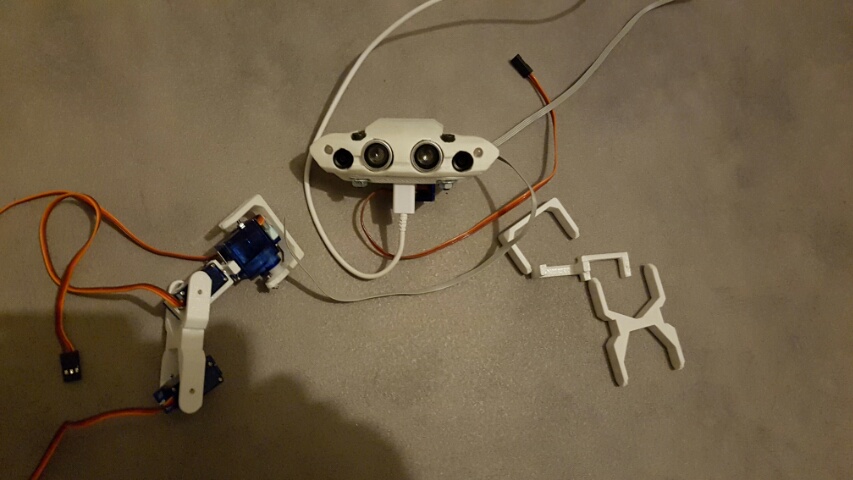
J'ai commencé à faire son bras.
Il manque le segment pour l'avant bras, celui qui contiendra les lasers.
Je pense faire d'abord la partie du haut: torse,bras,tête etc m'amuser un peu avec ça puis faire la base quadrupède et voir si je peux réellement assembler les deux.
J'avance pas très vite dessus avec les autres petits montages, mais il n'est pas abandonné
Je ne veux pas casser l'ambiance, mais des lasers qui font des trous sont à utiliser avec beaucoup de prudence.
Je viens d'avoir l'information qu'un enfant à perdu un oeil avec un joué de fête foraine suite à un tir dans un miroir qui lui a donc renvoyé le faisceau.
Sinon, génial idée