
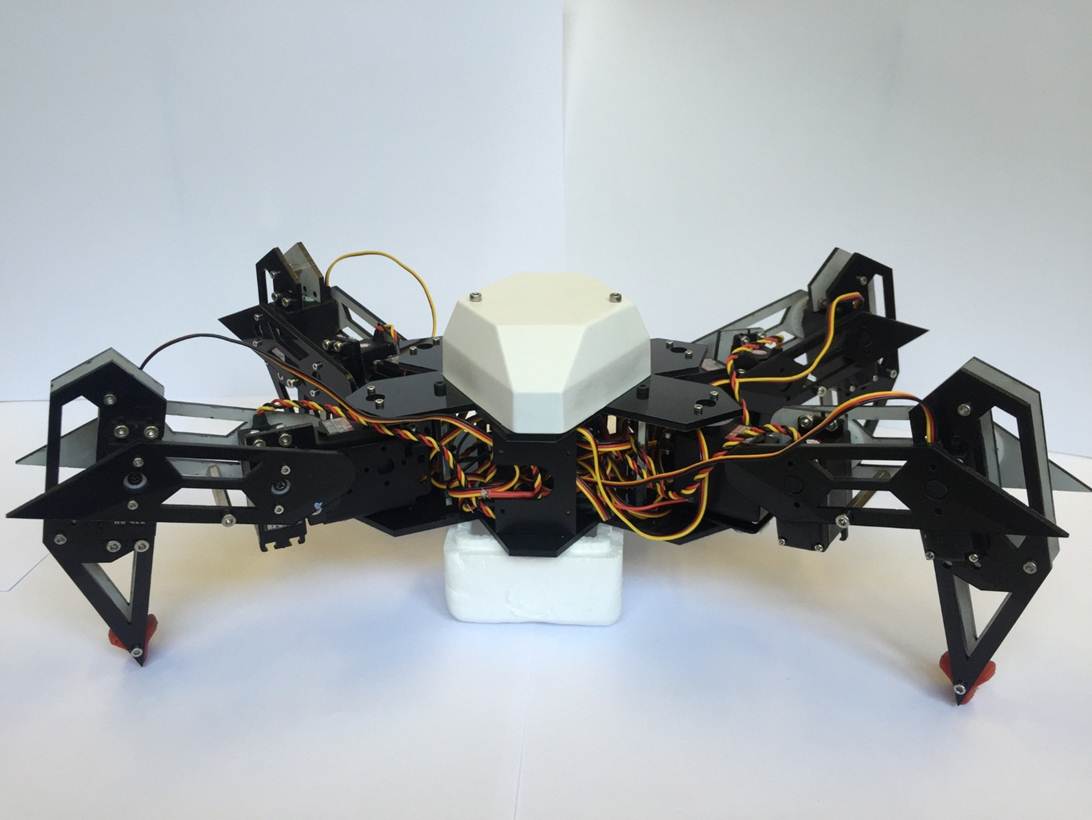
Bonjour a tous, je vous présente mon tout premier robot. Je ne lui est pas vraiment trouvé de nom donc nous l’appellerons Léo.
Je travaille dessus depuis maintenant 1 ans.
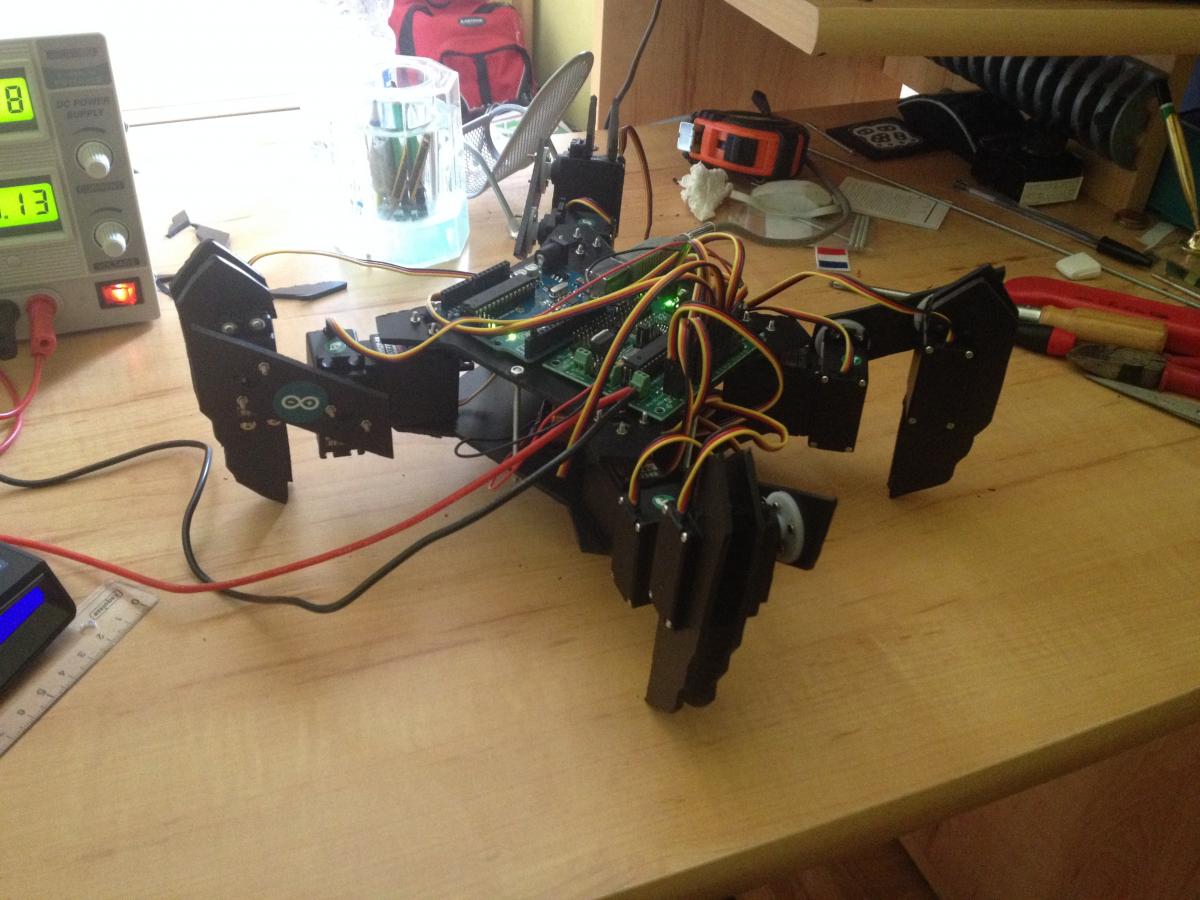
Les différents composant du robot sont :
- Une Carte Arduino Uno.
- Un contrôleur de servomoteur Mini Maestro 12.
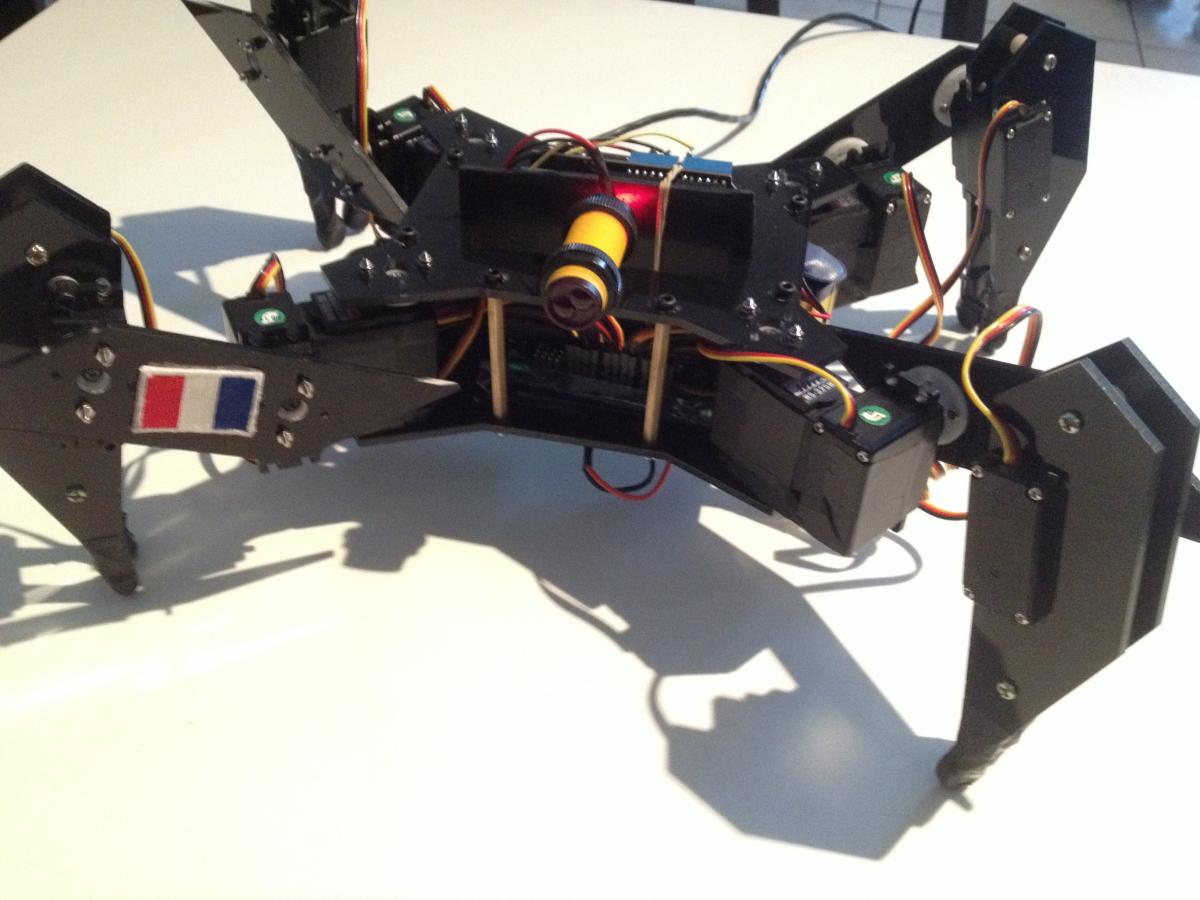
- 12 Servomoteurs Hitec HS-422 (Très peu puissant mais peu chère).
- Un shield Xbee de seedstudio
- 2 x Xbee S1
- Xbee usb explorer
- Accu 6V 2500mAh
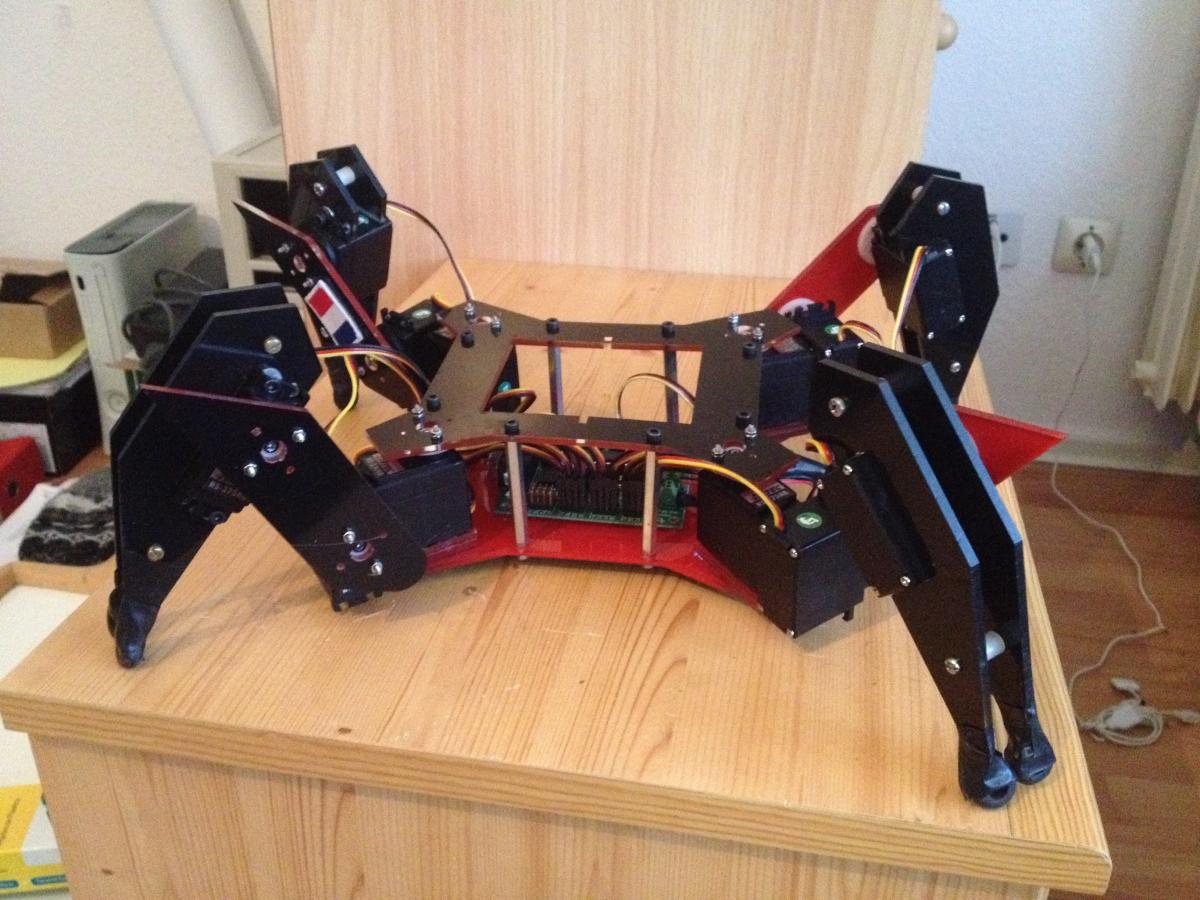
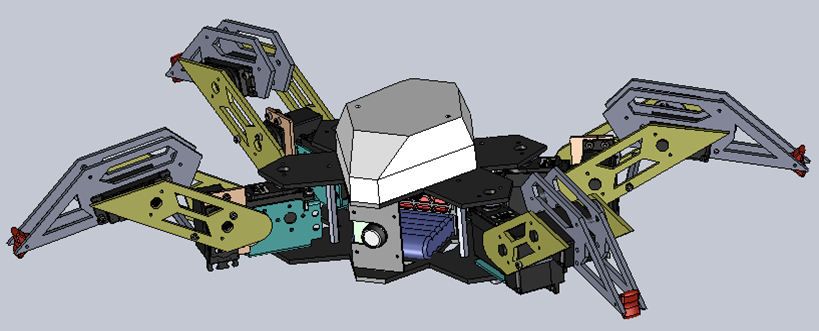
Le corps et et les pattes ont été modélisé sous Solidworks, puis usinée grâce à une machine lasers.
- Corps x 2
- Femur x 8
- Tibia x 8
Programmé sous Visual studio 2010 avec le SDK visual micro arduino. Je n'utilise pas encore la cinématique inverse mais je travaille actuellement dessus.
J'espère que le robot vous plaira, vous pourrez suivre l'évolution du robot depuis sa création avec les photos.
Si vous avez des question par rapport aux cartes ou si vous voulez reproduire les pièces ou avoir des informations pour pouvoir refaire votre exemplaire n'hésiter pas je vous aiderai du mieux que je peux !
A+
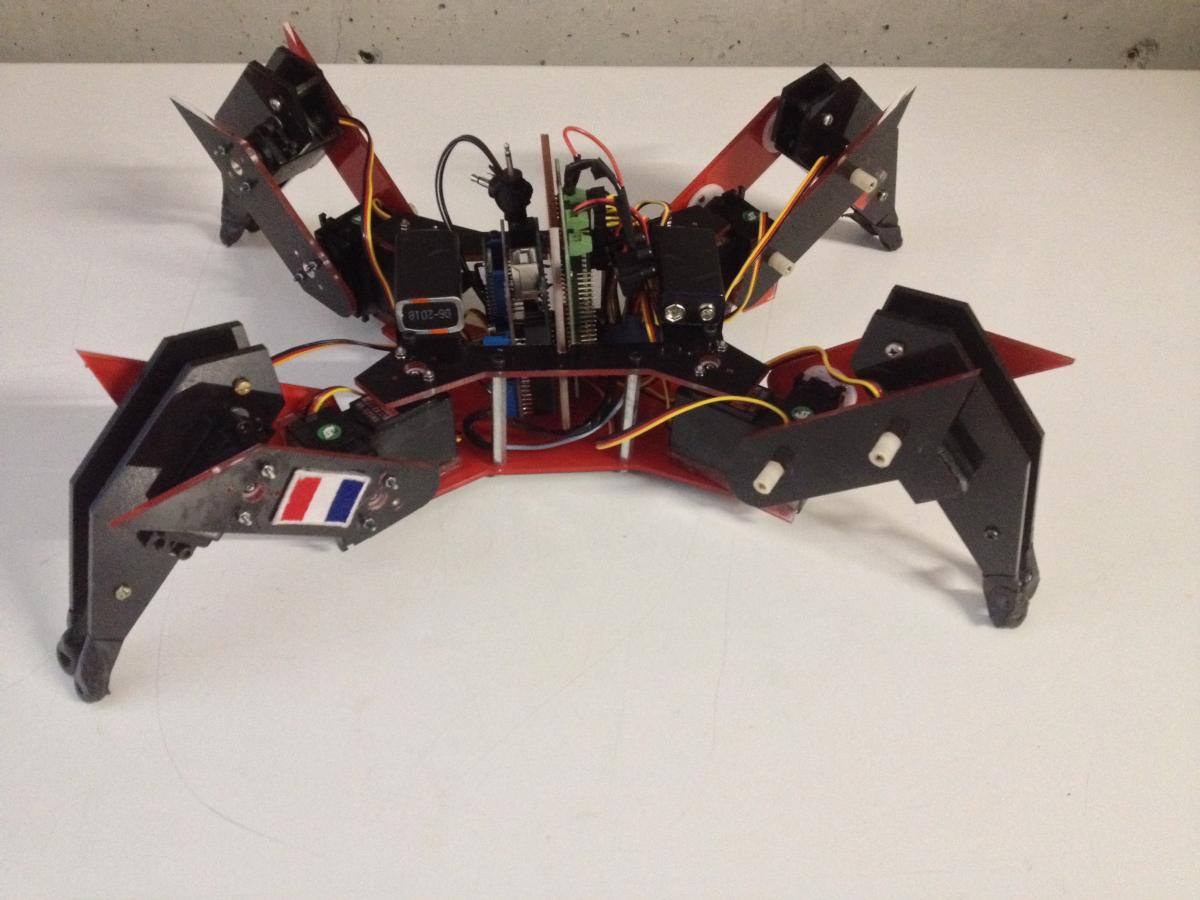
Ps: La toute dernière version avec la coque thermoformé a été repensé mécaniquement de A à Z.
J'ai rajouté de nouvelle photo.
Merci à tous pour l'aide que vous m'avez déjà fourni !
Big things have small beginning.
Image(s) jointe(s)


Modifié par Jan, 25 avril 2017 - 04:55 .






















