Merci pour le retour !
Quelques petites remarques: Q-learning, Deep Q-learning, Deep Deterministic Policy Gradient sont des algorithmes d'apprentissage par renforcement (RL - reinforcement learning): ils cherchent une solution à un problème de décision séquentielle, c'est à dire une séquence "d'actions" (au sens large) à effectuer pour atteindre un certain but.
Comme l'a précisé Yougo, l'algorithme reçoit une récompense quand il produit le comportement désiré (et une punition dans le cas contraire). Ici, pas de friandise ou de fessée, mais des valeurs numériques positives et négatives définies par un humain. Les algorithmes de RL se classent notamment en deux groupes selon qu'ils apprennent directement une politique ou une fonction de valeur, ou s'ils construisent un modèle du problème pour déduire ces informations. On parle de model-free et model-based dans la langue de Freddy Mercury, ou d'apprentissage direct et indirect dans celle de Yann Le Cun.
La différence entre Q-learning et les algo "Deep" (Deep Qlearning et DDPG), c'est que le travail de modélisation du problème est laissé à l'humain dans le premier cas : c'est au concepteur de définir ce qu'est un état, une action. Or, modéliser le problème, décider des états et actions n'est toujours simple. Si on peut facilement modéliser un problème de labyrinthe simulé comme un tableau dans lequel on passe d'une case à l'autre avec des mouvements nord-sud-est-ouest, modéliser le comportement d'un vrai robot dans un vrai labyrinthe est plus dur. Comme l'a expérimenté pmdd avec son projet récent, le robot ne se déplace pas toujours de la bonne distance, glisse un peu, etc. La solution proposée par le "Deep learning", c'est de laisser l'algorithme apprendre lui-même la modélisation en partant des données capteurs. Pas besoin d'estimer la position du robot, on donne juste l'image perçue par sa caméra, son odométrie, etc. et ça suffit à l'algorithme. En pratique, ça augmente beaucoup le temps nécessaire pour apprendre une bonne solution au problème (mais je ne vais pas rentrer dans les détails ici).
Enfin, il est effectivement plutôt difficile de conçevoir une fonction de récompense pertinente selon la tâche: si la récompense n'est donnée que lorsque le robot atteint l'objectif, l'apprentissage est long ; si elle est donnée plus fréquemment, il y a risque de converger vers un optimum local plutôt que l'optimum global. Une manière de contourner ce problème est d'utiliser un algorithme génétique : la fonction de fitness utilisée est très similaire à la fonction de récompense, mais le mécanisme de création de solution est moins sensible aux optima locaux, et il est possible de forcer l'agent à explorer différents comportements en ajoutant un terme de "diversité" à maximiser.
En tout cas, bon courage et bonne continuation !
Contenu de R1D1
Il y a 991 élément(s) pour R1D1 (recherche limitée depuis 29-mai 13)
Par type de contenu
Voir pour ce membre
#105885 WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
 Posté par
sur 21 octobre 2019 - 09:34
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 21 octobre 2019 - 09:34
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
#105711 Blabla divers
Posté par
sur 15 octobre 2019 - 10:16
dans
Bric-à-brac
Apparemment il s'agit simplement d'une orthographe ancienne de "Fair": https://www.yourdictionary.com/faire
Mon hypothèse, c'est que c'est un choix stylistique pour définir une marque, mais ça n'a guère plus de raison. D'un point de vue graphique, c'est plus pratique d'avoir deux mots de même longueur pour créer des logos symétriques.
Mais peut-être y-a-t'il une meilleure explication ? Tu peux demander à Dale Dougherty & Sherry Huss
Mon hypothèse, c'est que c'est un choix stylistique pour définir une marque, mais ça n'a guère plus de raison. D'un point de vue graphique, c'est plus pratique d'avoir deux mots de même longueur pour créer des logos symétriques.
Mais peut-être y-a-t'il une meilleure explication ? Tu peux demander à Dale Dougherty & Sherry Huss
#105630 Un robot robomaster présenté dans une boutique Dji à paris
Posté par
sur 09 octobre 2019 - 09:28
dans
Robotique ludique, robotique insolite
Et ça explique l'absence de prix du coup !
#105422 Limite d'age de la coupe de france de robotique
Posté par
sur 27 septembre 2019 - 05:25
dans
Coupe de France de robotique / Eurobot
Outre que cette discrimination est illégale, https://www.legifran...EXT000018877783, je trouve cela injuste.
Les époques étaient différentes, les moyens radicalement différents.
Souvent dans l'isolement le plus complet dans sa banlieue ou dans sa campagne, il était difficile de faire quoi que ce soit, même si ce n'était pas impossible.
J'ai attendu 60 ans, aujourd'hui j'en ai 66, pour enfin pouvoir réaliser tout ce dont je rêvais.
Alors, oui, ça passe mal ! Très mal !
Cette limite ne restreint pas tes droits fondamentaux (tu ne perds rien de nécessaire à ton niveau de vie ou ta dignité dans le fait de ne pas pouvoir accéder à cette compétition). Tout frustrant que ça puisse être, elle ne contraint que ton accès au divertissement (au sens large). Je comprends que l'évolution de la technologie ait été très rapide et que ce à quoi "les jeunes" ont accès maintenant est différent de ce à quoi ont accès la génération de leurs parents, mais effectivement, chacun est libre d'organiser la compétition sénior qu'il désire, sans limite d'âge.
#105374 Caliban Midi - E-Bunny
Posté par
sur 24 septembre 2019 - 03:35
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
J'ai peut-être déjà posté ce genre de choses, mais la question du simulateur est bien résumée ici: https://hal.inria.fr...518764/document
#105306 Système multi-filament pour imprimante 3D
Posté par
sur 20 septembre 2019 - 03:18
dans
Impression 3D et Imprimantes 3D
et pourquoi pas 4 entrées avec du cyan magenta jaune et noir comme sur les imprimantes papier pour pouvoir recréer toutes les couleurs ?
Je suis pas sûr que le plastique se mélange aussi facilement que de l'encre ... mais s'il existe une méthode pour colorer le plastique dynamiquement, ça pourrait marcher.
EDIT: ah ben tiens: https://reprap.org/w...ing_filament/fr
#105112 Turtlebot AutoRace 2020 & STEAM CUP 2020
Posté par
sur 07 septembre 2019 - 09:49
dans
Concours tournois et autres compétitions
Janvier 2020 pour ceux que ça intéresse !
#104613 Glenn Robot Humanoide
Posté par
sur 02 août 2019 - 11:59
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Power supply, régulation de tension, cet article de Wikipédia pour démarrer : https://fr.wikipedia...ion_électrique
J'ai le même problème avec Marcel, lister les plages de tension/courant entrées/sorties nécessaires à tes composants est un bon moyen de démarrer (e.g. Arduino Uno: 7-12V, ...).
Bon courage !
J'ai le même problème avec Marcel, lister les plages de tension/courant entrées/sorties nécessaires à tes composants est un bon moyen de démarrer (e.g. Arduino Uno: 7-12V, ...).
Bon courage !
#104582 Labyrinthe modulaire
Posté par
sur 28 juillet 2019 - 10:00
dans
Autres projets inclassables
Bonsoir !
Comme je l'avais évoqué dans le sujet de pmdd (voir ici: https://www.robot-ma...o-ev3/?p=104534), j'ai besoin d'un labyrinthe modulaire pour mes stagiaires. Après un design rapide sous Openscad pour avoir une idée de la réalisation, j'ai coupé une planche qui traînait pour faire mes parties. À la main, parce que ma scie sauteuse ne coupe pas droit !
Puis ponçage des pièces et assemblage des murs avec un clou et de la colle à bois ... Beaucoup d'huile de coude dans le processus.







Les murs font 80x160 mm, les plaques 160x160mm

Le labyrinthe est modulaire, on peut changer sa configuration case par case. Il me manque juste à faire quelques pieds supplémentaires pour que toutes les planchers soient bien à plat.


#104534 Robots roulants autonomes Lego Ev3
Posté par
sur 26 juillet 2019 - 12:24
dans
Lego
Je suis en train de fabriquer ça pour mes stagiaires qui travaillent avec Thymio:
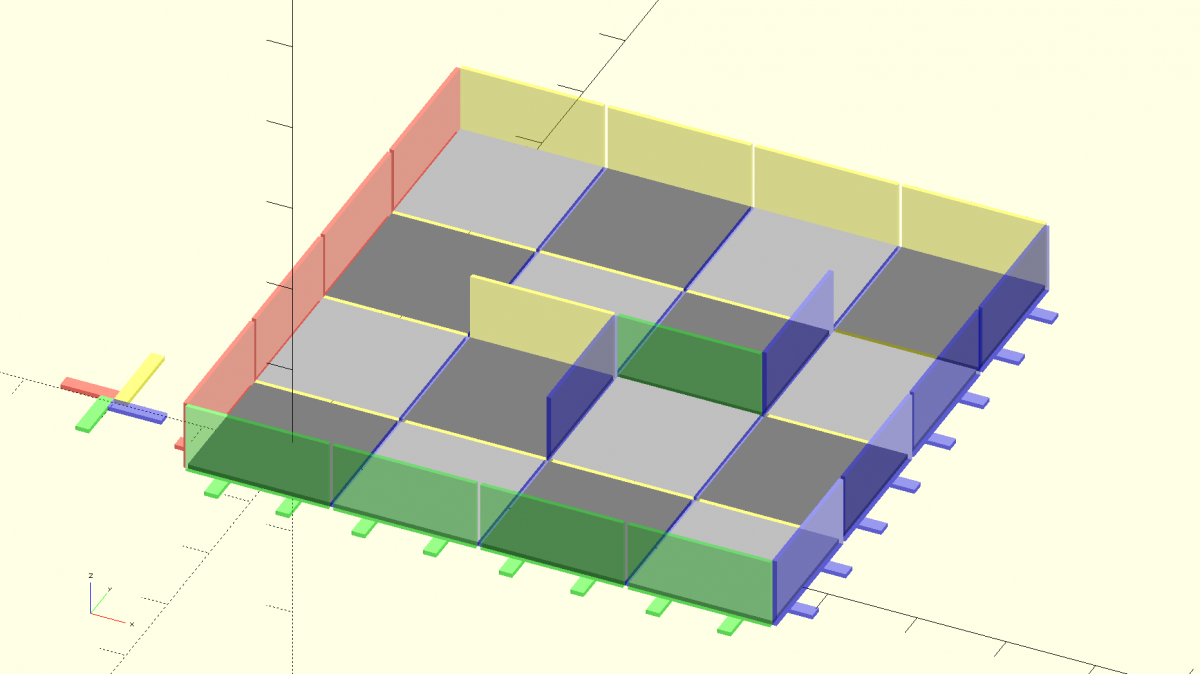
Je mets également le .scad dans cette version si tu veux jeter un oeil, les cases font 16x16, les murs 16x8 mais c'est changeable facilement.
 maze_plates.scad.zip 765 octets
150 téléchargement(s)
maze_plates.scad.zip 765 octets
150 téléchargement(s)
Je mets également le .scad dans cette version si tu veux jeter un oeil, les cases font 16x16, les murs 16x8 mais c'est changeable facilement.
maze_plates.scad.zip 765 octets
150 téléchargement(s)
#104439 Une rencontre des makers
Posté par
sur 16 juillet 2019 - 03:05
dans
Apérobots et autres rencontres IRL
Bawé mais quand je fais des démos vous venez pas !


#104437 Robots roulants autonomes Lego Ev3
Posté par
sur 16 juillet 2019 - 02:59
dans
Lego
Moi j'te l'fais à 2€ le quart d'heure d'impression en PLA + frais de port.
Puis je commande tout ça chez Mike https://www.robot-ma...0-couleur-rouge
https://www.robot-ma...0-couleur-rouge
Puis je commande tout ça chez Mike
https://www.robot-ma...0-couleur-rouge
#104430 Une rencontre des makers
Posté par
sur 16 juillet 2019 - 08:37
dans
Apérobots et autres rencontres IRL
Sinon Zurich c'est sympa aussi
#104398 OpenSCAD
Posté par
sur 13 juillet 2019 - 12:26
dans
Logiciels
Perso je suis un gros fan d'Openscad, évidemment parce que coder est quelque chose de simple pour moi. J'ai commencé sur Solidworks au lycée, et je pensais retrouver ces principes dans FreeCAD, mais je l'ai trouvé très peu clair et difficile à prendre en main. Je suis sur Linux, donc pas accès à Fusion 360. Openscad permet de faire des designs plutôt évolués, par contre, il y a une courbe d'apprentissage pour faire des choses pointues. De mon expérience, il faut un grande rigueur pour se faciliter la vie (bien définir des fonctions/modules, organisés pour maximiser la réutilisation), mais ça vient avec la pratique.
Quelques points négatifs : le rendu n'est pas toujours top (e.g. la transparence n'est pas bien gérée), le soft galère dès qu'il y a trop de formes détaillées, quelques bugs.
Les points positifs: positionnement très précis des pièces/transformations en indiquant la valeur explicitement, réutilisation et modularité (dans mon post sur Marcel, j'ai pu tester des schemas de couleurs différents avec un tableau et deux boucles, c'est super rapide).
Bref, je pense que c'est un très bon outil - pas parfait - qui mérite de se développer et qui offre une approche plutôt unique de la modélisation.
#104388 La RMSA ( Robot Maker School Academie ) / le robot maker lab à Anglet
Posté par
sur 12 juillet 2019 - 08:45
dans
Projets collaboratifs
Quelques points rapidement:
- le statut et le modèle de financement (bizness model :money: ) et de développement, bien que pas les parties les plus intéressantes, sont super importantes. Le statut légal d'un tiers-lieu financé par la mairie impose probablement des contraintes sur l'activité ou les modes de revenus qu'il faut prendre en compte. Le mode de financement est -- malheureusement -- au coeur du problème (sauf si t'as gagné au loto ) : qu'est-ce qui est "vendu", pour quels "clients", etc.
Par exemple, les particuliers intéressés représentent probablement peu de personnes/d'argent comparé au coût de maintenance d'un tel endroit.
Anglet est-il le meilleur endroit pour ça en termes d'intérêt, de taille de population ? Exemple: le Deep Learning Meetup à Paris est toujours complet et rassemble plus de 100 personnes régulièrement ; un évènement similaire dans la 5ème plus grosse ville d'Autriche peine à rassembler 30 personnes. Je ne sais pas quel est la proportion de personnes intéressées par le sujet dans le Sud-Ouest (en dehors des étudiants de l'ESTIA mais qui ont probablement déjà accès à l'équipement de l'école), mais c'est à considérer.
Bref, loin de moi l'idée de te décourager, au contraire, je pense que ça peut être un super projet, mais loin d'être facile.
Par ailleurs, j'ai envie de dire que s'il y a un appel à projets, ça vaut le coup de le tenter ne serait-ce que pour formaliser ton idée dans un plan réalisable. Et si ça passe, c'est parti
- le statut et le modèle de financement (bizness model :money: ) et de développement, bien que pas les parties les plus intéressantes, sont super importantes. Le statut légal d'un tiers-lieu financé par la mairie impose probablement des contraintes sur l'activité ou les modes de revenus qu'il faut prendre en compte. Le mode de financement est -- malheureusement -- au coeur du problème (sauf si t'as gagné au loto
) : qu'est-ce qui est "vendu", pour quels "clients", etc.Par exemple, les particuliers intéressés représentent probablement peu de personnes/d'argent comparé au coût de maintenance d'un tel endroit.
Anglet est-il le meilleur endroit pour ça en termes d'intérêt, de taille de population ? Exemple: le Deep Learning Meetup à Paris est toujours complet et rassemble plus de 100 personnes régulièrement ; un évènement similaire dans la 5ème plus grosse ville d'Autriche peine à rassembler 30 personnes. Je ne sais pas quel est la proportion de personnes intéressées par le sujet dans le Sud-Ouest (en dehors des étudiants de l'ESTIA mais qui ont probablement déjà accès à l'équipement de l'école), mais c'est à considérer.
Bref, loin de moi l'idée de te décourager, au contraire, je pense que ça peut être un super projet, mais loin d'être facile.
Par ailleurs, j'ai envie de dire que s'il y a un appel à projets, ça vaut le coup de le tenter ne serait-ce que pour formaliser ton idée dans un plan réalisable. Et si ça passe, c'est parti
#104296 Au bistrot du coin ...
Posté par
sur 05 juillet 2019 - 10:00
dans
Général
#104266 Led RGB/Arduino avec E/S analogique
Posté par
sur 04 juillet 2019 - 11:07
dans
Programmation
Alors, je me suis posé le même genre de question (où mettre mes LEDs RGB) sur ma pauvre Arduino déjà bien remplie tout en gardant la variété d'illuminations possibles. La solution à laquelle je suis arrivé est de remplacer les LED par des rubans de LEDs adressables.
En gros, quelque soit le nombre de LED voulues, tu n'as besoin que de +Vcc, GND et SIG (donc au mieux, 3 pins, peut-être plus selon les modèles de ruban). Il faut dimensionner l'alimentation en conséquence, mais couper et souder un ruban avec le bon nombre de LED est facile.
Disclaimer : je parle en théorie, je n'ai pas fini de tester le setup moi-même, mais je n'ai rien vu qui s'oppose à cette idée jusqu'à présent dans mes recherches.
En gros, quelque soit le nombre de LED voulues, tu n'as besoin que de +Vcc, GND et SIG (donc au mieux, 3 pins, peut-être plus selon les modèles de ruban). Il faut dimensionner l'alimentation en conséquence, mais couper et souder un ruban avec le bon nombre de LED est facile.
Disclaimer : je parle en théorie, je n'ai pas fini de tester le setup moi-même, mais je n'ai rien vu qui s'oppose à cette idée jusqu'à présent dans mes recherches.
#104201 Concours Machine Gones à Lyon
Posté par
sur 28 juin 2019 - 05:04
dans
Concours tournois et autres compétitions
Cool !
Petitt conseil rapide, mets de la mousse ou un truc pour absorber les chocs pendant le transport, ça évite les mauvaises surprises (même quand tu fais gaffe).
Bonne chance !
#104174 Concours Machine Gones à Lyon
Posté par
sur 27 juin 2019 - 02:15
dans
Concours tournois et autres compétitions
La hype est élevée !
J'attends aussi les photos et vidéos !
J'attends aussi les photos et vidéos !
#104144 ESP32 - Fan 3 fils
Posté par
sur 26 juin 2019 - 09:36
dans
Programmation
Je ne connais pas le TMP36, mais est-ce que tu ne veux dire plutôt que la température est convertie en tension (et donc qu'il faudrait lire cette tension sur un pin analogique) ? Je ne connais pas de relation physique entre la tension mesurée et la température (on pourrait imaginer que la tension et le courant aux bornes d'un composant donne une estimation de sa consommation et donc indirectement de l'énergie qu'il convertit en chaleur, mais ça me semble beaucoup trop inndirect et compliqué).
D'ailleurs, c'est ce que semble faire ton code (lire la tension sur un pin analogique), et ça sera la même chose avec le DHT22 (qui n'a pas une fréquence très haute de lecture, de mémoire).
D'ailleurs, c'est ce que semble faire ton code (lire la tension sur un pin analogique), et ça sera la même chose avec le DHT22 (qui n'a pas une fréquence très haute de lecture, de mémoire).
#104124 Blabla divers
Posté par
sur 25 juin 2019 - 08:20
dans
Bric-à-brac
Spider-UAV pour l'exploration de vieux bâtiments ? Je te dis pas la frayeur des gosses qui se baladaient dans le château au même moment !
#103999 Achat groupé Robomaster S1 de DJI en France
Posté par
sur 19 juin 2019 - 11:10
dans
News, actus de la boutique
Tentant, même si le prix est clairement un frein. Je serais aussi curieux de voir dans quel mesure il est "hackable" (genre s'ils offrent une API ou si tout le système est fermé).
#103981 Retour ICRA 2019
Posté par
sur 18 juin 2019 - 10:27
dans
Galeries photo
Yes, Lidar 3D, on l'aperçoit quand je m'approche sinon sur le mât dans le modèle 3D.
#103974 Retour ICRA 2019
Posté par
sur 17 juin 2019 - 10:12
dans
Galeries photo
Yop !
Fin Mai, j'ai eu l'occasion d'aller à ICRA, une des deux plus grosses conférences de robotique à Montréal, du coup, voici quelques photos et vidéos de ce que j'ai pu y voir:
- Palais des Congrès de Montréal:

- Robot Fetch

- DJI et son Challenge RoboMaster


- Laikago et Spot Mini nous ont fait de belles démos:
- Robotique modulaire (Hebi robotics)
- Clearpath Warthog, robot d'extérieur:
- Robotique et art :
#103837 "if" ou "switch case" ?
Posté par
sur 11 juin 2019 - 02:30
dans
Programmation
Tu ne peux pas utiliser de switch/case ici: switch/case fonctionne sur des valeurs fixes pré-définies ou utilise le comportement par défaut. En gros, tu peux dire "variable == valeur", mais pas "variable < valeur". Tout cas non-défini correspond à "case: default".
Par ailleurs, je doute qu'on observe des différences de vitesse de traitement entre if/else ou switch/case; Si tu penses que tu as ce problème, tu peux utiliser millis() et calculer le temps passé à exécuter la condition.
Si tu veux simplifier le code, tu peux utiilser une multimap (qui fait en gros ce que tu fais là mais avec une fonction déjà implémentée.
Par ailleurs, un encodage plus efficace de ta comm serait d'avoir un seul encodage de ta valeur de vitesse (de 0 à 32, avec 0==0, 1=60, 32=255, ou de lire directement la valeur x et de calculer vitesse = 0.159 * x + 60) et d'envoyer un code pour le signe et le moteur (peut-être tout directement en binaire pour combiner les infos). La fonction que tu mappes est simplifiable (si la comm du RPi le permet).
Par ailleurs, je doute qu'on observe des différences de vitesse de traitement entre if/else ou switch/case; Si tu penses que tu as ce problème, tu peux utiliser millis() et calculer le temps passé à exécuter la condition.
Si tu veux simplifier le code, tu peux utiilser une multimap (qui fait en gros ce que tu fais là mais avec une fonction déjà implémentée.
Par ailleurs, un encodage plus efficace de ta comm serait d'avoir un seul encodage de ta valeur de vitesse (de 0 à 32, avec 0==0, 1=60, 32=255, ou de lire directement la valeur x et de calculer vitesse = 0.159 * x + 60) et d'envoyer un code pour le signe et le moteur (peut-être tout directement en binaire pour combiner les infos). La fonction que tu mappes est simplifiable (si la comm du RPi le permet).




