Message déplacé dans un nouveau sujet : http://www.robot-maker.com/forum/topic/10212-competition-de-robot-bipede/ (désolé)
Contenu de yamovince
Il y a 297 élément(s) pour yamovince (recherche limitée depuis 11-juin 13)
Par type de contenu
Voir pour ce membre
#66800 Combat de robot
 Posté par
sur 25 janvier 2016 - 05:03
dans
Concours tournois et autres compétitions
Posté par
sur 25 janvier 2016 - 05:03
dans
Concours tournois et autres compétitions
#66804 Compétition de robot bipède
Posté par
sur 26 janvier 2016 - 09:23
dans
Concours tournois et autres compétitions
Bonjour le forum Robot-maker !
Je vois plusieurs sujets concernant des combats de robot. Est-ce que certains d'entre vous construisent des robots bipèdes pour faire des petits combats ?
De mon côté je construis un robot bipède minimaliste et j'ai demandé aux organisateurs du tournoi de Nîmes (du 21 et 22 mai 2016) si ils comptaient ouvrir une catégorie pour les bipèdes.
Pour l'instant cette catégorie n'existe pas faute de participant mais ils m'ont proposé d'organiser un combat de démonstration contre leur robonova.
J'ai répondu que j'étais partant. Est-ce qu'il y aurait d'autres adversaires par ici  ?
?
#66842 Bonjour
Posté par
sur 30 janvier 2016 - 02:08
dans
Et si vous vous présentiez?
Je lis ce forum depuis 1 semaine et je me décide à me présenter.
Je travaille dans une ESN sur des projets de développement d'appli...
En parallèle je m’intéresse depuis 1 an à la robotique. Avant ça j'avais commencé un autre projet avec un microcontrôleur Atmel ATtiny. Du coup je suis parti de là pour essayer de commander un premier servomoteur.
Ensuite il m'est venu l'idée saugrenu de tenter de faire un robot "humanoïde" avec 6 petits servomoteurs 9g et des lego duplo.

J'ai programmé un semblant de mouvement de marche en coordonnant ces 6 servos mais vu leurs faibles puissances, le robot s'est effondré dès que je l'ai posé au sol.
J'ai retenté l'expérience avec des servos beaucoup plus puissants (Blue Bird BMS-620MG) et pour les fixations, des équerres (en zinc) pour meubles.
Cette fois le robot était beaucoup trop lourd et ces servos ne gardent pas leur position à moins de les maintenir constamment sous tension en leur demandant de maintenir un angle. J'ai fini par en griller la moitié.
Finalement le troisième essai a fonctionné. 6 servos SpringRC SR-402P et des fixations en alu que j'ai usiné (j'ai trouvé des petites barres d'1m chez casto). Au passage j'ai changé de microcontrôleur pour un ATMega8 qui me permet de programmer les mouvements plus précisément (j'étais aux limites de la mémoire de mon ATTiny2313).
Le robot se déplace de façon stable et à une vitesse que je trouve satisfaisante.
Naturellement la démarche n'est pas fluide avec seulement 6 DOF mais je suis ravi d'avoir atteint ce premier objectif
A présent je suis en train d'ajouter des bras en gardant une approche très minimaliste.
Mon prochain objectif, faire un petit combat pour le fun avec le robonova d'un des organisateurs pendant le tournoi de Nîmes en mai prochain.
@+
Image(s) jointe(s)



#66868 Robot bipède pour le tournoi de Nimes en mai 2016
Posté par
sur 01 février 2016 - 03:20
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Hello !
Comme indiqué dans le titre, j'ai pour objectif de réaliser un robot bipède pour le tournoi de robotique de Nimes en mai de cette année.
Il n'y a pas de catégorie pour bipède à ce tournoi mais l'organisateur m'a proposé de faire un combat pour le fun contre son robonova.
J'ai décidé de démarrer ce petit sujet pour échanger avec vous, vous montrer mon avancement, recueillir vos conseils et me garder motivé !
Je suis parti de ce robot bipède que je viens de construire :
Voici les grosses étapes à réaliser d'ici la deadline du 21 mai :
- réduire la taille des jambes pour se rapprocher d'un robonova (17cm pour les jambes, 30cm au total)
- ajouter des bras (je pense à une approche minimaliste avec 2 servomoteurs pour les épaules et 1 pour pivoter le tronc)
- programmer les différentes routines pour permettre au robot d'avancer, reculer, tourner, "frapper" et surtout se relever après une chute!
- ajouter un système de commande sans fil pour déclencher ces routines
Ce week-end, je me suis déjà attaqué aux 2 premiers points, photos à venir !
#66869 Bonjour
Posté par
sur 01 février 2016 - 03:22
dans
Et si vous vous présentiez?
Merci pour l'accueil et l'invitation à votre idée de malade http://www.robot-maker.com/forum/topic/10110-robot-de-combat-revisite/
Vous êtes partis super loin ! why not
Pour la vidéo du dernier né, en fait je viens de démarrer un sujet qui lui est dédié http://www.robot-maker.com/forum/topic/10225-robot-bipede-pour-le-tournoi-de-nimes-en-mai-2016/
#66883 Roby/ Robot bipede basé sur le kit Bioloid Comprehensive
Posté par
sur 02 février 2016 - 05:10
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
hyper intéressant comme projet, j'ai également comme objectif de construire une main pour un prochain projet.
#67151 Robot bipède pour le tournoi de Nimes en mai 2016
Posté par
sur 14 février 2016 - 10:20
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Yes ! voici une photo du bipède avec des bras!
Depuis la vidéo de mon post précédent,
- j'ai divisé la longueur des jambes par 2
- ajouté 2 bras + un servomoteur pour la rotation du torse
Je dois finir de câbler les nouveaux servo et ensuite je passerai à la programmation.
C'est un premier essai de design mais il faut que je test pour voir si le robot peut arriver à se mettre debout tout seul.
Image(s) jointe(s)

#67375 Robot bipède pour le tournoi de Nimes en mai 2016
Posté par
sur 20 février 2016 - 11:35
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Merci R2D21995 et mike118 pour votre intérêt à l'égard de ce projet, ça m'incite à venir vous donner des nouvelles fraiches !
Aujourd'hui j'ai franchi une très grosse étape du projet.
Le robot passe de la position couchée à la position debout !
Je me suis bien acharné sur le code. D'abord, j'essayais de faire basculer les "genoux" vers l'avant pour ensuite redresser le corps avec les servos du haut des jambes. Je n'ai pas réussi à faire passer le centre de gravité suffisamment vers l'avant et le robot repartait toujours en arrière.
J'ai trouvé qu'une rotation du torse permettait de relever un peu le dos du robot. Par contre, je n'arrivait toujours pas à le redresser avec les genoux.
Finalement, j'ai trouvé qu'avec un basculement sur une jambe et en lançant la jambe opposée vers l'avant (pour faire balancier avec le haut du robot), le centre de gravité était bien placé pour pouvoir faire un pivotement vers l'avant !
Je suis content d'y être arrivé sans remettre en cause le design du robot
Pour finir cette étape, je n'ai plus qu'à adapter le code pour que le robot se relève aussi bien à partir d'une position couchée sur "le dos" que sur "le ventre".
#67567 Robot bipède pour le tournoi de Nimes en mai 2016
Posté par
sur 27 février 2016 - 10:12
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Oui Mike, j'avais effectivement essayé de redresser le robot en faisant une rotation des "épaules". C'est d'ailleurs pour ça que j'ai mis des roues aux bouts des bras.
Vu la longueur des bras, ce mouvement demande trop de puissance et les servos ne suivent pas.
Par contre je vais garder les roues aux bouts des bras et je vais tenter de programmer un mouvement de brouette !
La semaine dernière j'ai commandé une carte bluetooth nRF8001 Adafruit pour faire la commande des mouvements depuis mon smartphone.
J'ai choisi cette carte surtout par rapport à ses dimensions pour que ça rentre sur ma platine d'expérimentation.
J'ai galéré galéré galéré toute la semaine pour faire marcher ce bazar mais j'ai réussi ! vidéo à venir 
Image(s) jointe(s)

#67819 Robot bipède pour le tournoi de Nimes en mai 2016
Posté par
sur 06 mars 2016 - 11:25
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Merci Macerobotics ! les servomoteurs sont des SR-402P. J'en utilise 8 sur ce robot et pour l'instant aucune casse !
Ils ont un pignon métallique d'un côté et de l'autre côté de l'axe, on peut fixer un écrou pour faire pivoter.
L'autre intérêt et qu'ils gardent leur position tant qu'il sont alimentés.
Comme promis, voici une petite vidéo de la mise en œuvre d'une carte bluetooth nRF8001 Adafruit :
Pour tester, j'ai installé l'application pour Android fournie par Adafruit.
A la base, cette application permet d'échanger du texte entre un smartphone et la console de l'IDE Arduino à laquelle est reliée la carte bluetooth.
Adafruit fournit aussi un code en C pour Arduino. J'ai légèrement modifié ce code pour déclencher des mouvements en fonction des caractères reçus ex :
l = coup de poing gauche
r = coup de poing droit
Là où j'ai galéré, c'était pour charger le code Arduino dans mon Atmega (sans carte Arduino). Finalement en installant la version 7.0 d'Atmel Studio j'ai pu charger le "sketch" (le programme Arduino) fourni par Adafruit. J'ai simplement eu à faire une correspondance entre les bornes Arduino appelées dans le programme et les pattes de mon Atmega.
J'ai dû aussi revoir plusieurs fois le branchement des commandes de mes servomoteurs sur mon Atmega. Les pattes TX et RX de l'Atmega ne pouvant être utilisées pendant le transfert de données, je n'avais plus assez d'entrées/sorties. Finalement j'ai regagné 2 entrées/sorties en utilisant l'horloge interne de l'Atmega au lieu de mon oscillateur 16 MHz externe.
C'était la dernière grosse étape de ce projet, maintenant je n'ai plus qu'a peaufiner tout ça
#67897 Prothèse de main 3D
Posté par
sur 10 mars 2016 - 03:49
dans
Mécanique
Bonjour SamM,
Je n'ai pas réalisé ce type de feedback mais j'imagine qu'un capteur de force de ce type pourrait être utile ? http://www.gotronic.fr/art-capteur-de-force-fsr01-11552.htm
Ce sujet m’intéresse beaucoup, peux-tu m'indiquer dans quel type de structure tu développes ce projet (école, association, entreprise) ?
J'aimerais également m'investir dans ce type de projet.
A+
#67928 Création du robot BB8 Star Wars (HELP)
Posté par
sur 14 mars 2016 - 02:07
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour Rooly, je n'ai pas la réponse à ta question mais j'aime bien votre projet. C'est marrant je viens de voir cette vidéo avec un robot sphérique.
J'espère que vous nous montrerez les avancés de votre projet.
#67929 Ash, Self balancing robot
Posté par
sur 14 mars 2016 - 02:17
dans
Robots roulants, chars à chenilles et autres machines sur roues
Sympa ton Ash, merci de partager tes aventures
#67939 Robot bipède pour le tournoi de Nimes en mai 2016
Posté par
sur 15 mars 2016 - 02:18
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Le "Combat de Robots humanoïdes" est annoncé sur le site du tournoi de Nimes !
D'après l'article, "Deux robots devraient être prêts pour cette démonstration" (un Robonova et le mien) 

D'après l'organisateur, un de ses étudiant est en train de programmer le Robonova.
De mon côté, voici une liste des objectifs restant pour mon robot :
- retravailler le programme des mouvements : déplacement vers l'avant, l'arrière, à doite, à gauche, se relever sur le dos et sur le ventre, coup de poing droit, coup de poing gauche, mouvement de défense.
- développer une appli Android avec une interface pour contrôler à distance les différents mouvements
Gagner en autonomie :
- détecter sa chute grâce à un accéléromètre et déclencher le mouvement permettant de se relever
- détecter la proximité d'un adversaire et déclencher un coup de poing
A suivre...
#68015 Prothèse de main 3D
Posté par
sur 17 mars 2016 - 07:46
dans
Mécanique
Effectivement je compte m'investir dans ce domaine (bénévolement), je me suis déjà rapproché de l'association ASSEDEA après avoir lu cet article :
Si on peut échanger pour avancer plus vite ça serait top.
#68025 Prothèse de main 3D
Posté par
sur 17 mars 2016 - 11:01
dans
Mécanique
Yes Mike, j'avais bien en tête de garder ce forum comme support de notre échange
Pour bien démarrer, on va établir un "cahier des charges" avec l'association en prenant le temps de bien comprendre leur besoin.
SamM, est-ce que tu pourrais nous donner des infos sur le cahier des charges de ton projet ?
ca permettrait de voir les points sur lesquels nous pourrions mutualiser notre travail
#68065 Mon bipède 100% fait maison
Posté par
sur 18 mars 2016 - 02:10
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Excellent, effectivement il y a de quoi s'amuser.
Je pense que pour gagner en vitesse et souplesse il faut déclencher plusieurs mouvements en même temps. Pour l'instant visiblement tu commandes un servo après l'autre.
#68066 Ash, Self balancing robot
Posté par
sur 18 mars 2016 - 05:32
dans
Robots roulants, chars à chenilles et autres machines sur roues
Incroyable ca, du JS dans un robot. Merci pour l'info
et Raspberry + Arduino ca promet
#68347 un hexapod géant
Posté par
sur 29 mars 2016 - 10:38
dans
Energie
Super projet, je pense aussi qu'une version miniature serait utile avant de lancer les grosses dépenses.
Ca permettrait de valider la conception mécanique et de démarrer la programmation puisque les mouvements seront les mêmes que pour la version "lourde".
Je préconise de développer le projet en méthode "agile" pour tester brique par brique et d'avancer par itération. L'idée étant de construire, déconstruire mais d'avancer en testant régulièrement ses idées plutôt que d'avancer trop vite et finir dans une impasse.
Have fun !
#68474 Robot bipède pour le tournoi de Nimes en mai 2016
Posté par
sur 03 avril 2016 - 04:17
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Hello, voici un petit update :
Je travaille sur les mouvements
- marche avant
- rotation à droite
- rotation à gauche
J'ai pas mal travaillé le programme pour que ces mouvements puissent s'enchainer de façon fluide et continue.
Voici une petite vidéo de "mise en situation" ! je déclenche les mouvements à distance grâce au module bluetooth et l'appli Android.
Pour l'instant j'utilise encore l'appli Android de base fournie par Adafruit qui permet de saisir des caractères et j'ai associé ces caractères aux différents mouvements dans le programme chargé sur l'AT Mega... Je m'attaquerai au développement d'une appli sur-mesure après.
Par contre j'ai un souci au niveau des fixations des servos. Après une petite promenade du robot, la plupart des vis sont desserrées.
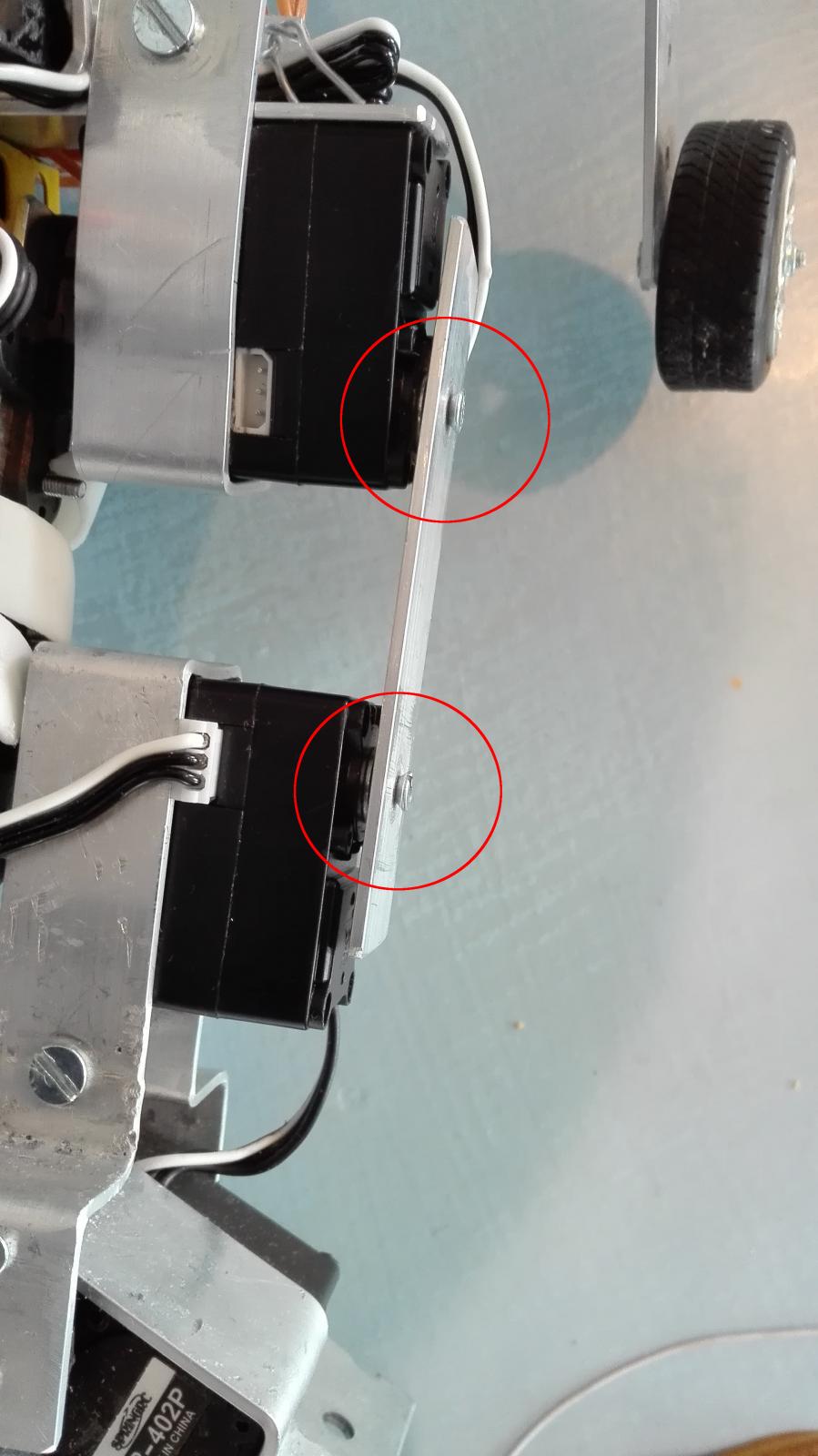
Est-ce que vous avez une astuce pour que les vis ne tournent pas ? je me demande si enrouler le filetage avec du teflon pourrait faire...
Image(s) jointe(s)

#68889 Fabien - Community Manager Salon de robotique 2016 - Nîmes
Posté par
sur 12 avril 2016 - 12:59
dans
Et si vous vous présentiez?
Je vous propose de venir vous affronter sur le ring du tournoi avec vos robots 
Mais effectivement avant de parler de l'évènement, comme on est dans la page de présentation est-ce que tu pourrais nous dire si tu t’intéresses à la robotique ou comment vous avez eu l'idée/l'opportunité de faire la promo de l'évènement ?
Sinon R1D1, Fabien tu me corrigeras si je me trompe mais les inscriptions pour les Robot Sumo sont terminées.
Par contre on peut encore s'inscrire à la compétition de robot Lego pour les enfants et surtout si tu as un robot humanoïde, je pense que tu peux participer au combat puisque l'organisateur a indiqué sur son site "Deux robots devraient être prêts pour cette démonstration. En attendant, que d’autres participants osent se présenter."
#69250 HumaOne
Posté par
sur 19 avril 2016 - 01:17
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Salut Telson, bon courage pour ton projet
J'espère que tu iras au bout. Tu vas avoir le temps de t'amuser pour programmer tes 20 servos
Toutes les pièces du squelette seront réalisées par impression....Enfin le plus possible .....
Le squelette orange rend super bien sur les premières photos. T'es parti d'un modèle ?
#69252 Robot bipède pour le tournoi de Nimes en mai 2016
Posté par
sur 19 avril 2016 - 01:47
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Merci Mike, j'ai essayé ta solution de vernis à ongle et ça a tenu un peu plus longtemps. Du coup je suis allé plus loin, j'ai carrément mis de la colle forte et pour l'instant ça tient !
il faut bien penser à les rajouter ici :
Ok Jan merci pour l’invitation, je vais avancer encore un peu et je l'archiverai dans le roboscope avant le tournoi
Et merci macerobotics et Andarkam pour votre soutien c'est motivant !
Chapeau pour le script pour se relever avec si peu Dof. Chapeau
Justement Andarkam je me suis acharné tout le week-end dernier pour le redresser d'une autre façon.
Maintenant le robot s’appuie sur ses bras. C'est le mouvement que j'avais en tête au tout début. Je le trouve plus esthétique et plus standard comment disait Mike :
généralement les robots s'aident de leur bras et là toi non
Je garde aussi le premier mouvement en stock, ca permettra d'alterner (si d'aventure il lui arrivait de tomber !?  )
)
J'ai également commencé à travailler la marche arrière. Je vous ferai une vidéo de l'ensemble des enchainements.
#69261 projet bipede "boxeur"
Posté par
sur 19 avril 2016 - 07:44
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Excellent Micky, Here comes a new challenger !
Bonne chance pour ton projet et bon courage pour monter en compétence en programmation
Bonne chance pour ton projet et bon courage pour monter en compétence en programmation
#69262 [Projet Newton] Robot Humanoide
Posté par
sur 19 avril 2016 - 07:54
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Salut Andarkam, sacré projet de robot humanoïde! Intéressant cette carte Nanopi2 et ton idée de retour vidéo. C'est ambitieux, je vais suivre tout ca




