Bienvenue Computer Mail,
en plus ils se tapent dessus
C'est quoi ces manières ? Je ne vois pas de qui tu parles :s
Il y a 297 élément(s) pour yamovince (recherche limitée depuis 22-juin 13)
 Posté par
sur 16 février 2017 - 04:48
dans
Et si vous vous présentiez?
Posté par
sur 16 février 2017 - 04:48
dans
Et si vous vous présentiez?
Bienvenue Computer Mail,
en plus ils se tapent dessus
C'est quoi ces manières ? Je ne vois pas de qui tu parles :s
Posté par
sur 17 mars 2016 - 11:01
dans
Mécanique
Yes Mike, j'avais bien en tête de garder ce forum comme support de notre échange 
Pour bien démarrer, on va établir un "cahier des charges" avec l'association en prenant le temps de bien comprendre leur besoin.
SamM, est-ce que tu pourrais nous donner des infos sur le cahier des charges de ton projet ?
ca permettrait de voir les points sur lesquels nous pourrions mutualiser notre travail 
Posté par
sur 17 mars 2016 - 07:46
dans
Mécanique
Effectivement je compte m'investir dans ce domaine (bénévolement), je me suis déjà rapproché de l'association ASSEDEA après avoir lu cet article :
Si on peut échanger pour avancer plus vite ça serait top.
Posté par
sur 10 mars 2016 - 03:49
dans
Mécanique
Bonjour SamM,
Je n'ai pas réalisé ce type de feedback mais j'imagine qu'un capteur de force de ce type pourrait être utile ? http://www.gotronic.fr/art-capteur-de-force-fsr01-11552.htm
Ce sujet m’intéresse beaucoup, peux-tu m'indiquer dans quel type de structure tu développes ce projet (école, association, entreprise) ?
J'aimerais également m'investir dans ce type de projet.
A+
Posté par
sur 24 juin 2016 - 11:22
dans
Autres projets inclassables
Hello,
De ce que je comprends, pylegal veut quelque chose proche d'un robot de téléprésence style "Awabot"

Un robot commandé à distance mais au lieu d'avoir un écran, le robot portera la fameuse borne c'est bien ça ?
Je pense aussi au robot d'accueil "Sheldon" que j'ai rencontré à la "maker faire" de Lyon l'autre jour. Voir : http://www.evotion.com/fr/robots/sheldon/"

Mais par rapport aux dimensions et à la forme, ça pourrait ressembler au robot hôtelier "Relay" de Savioke

J'ai bon ?
Posté par
sur 06 mars 2019 - 10:52
dans
Général
Cool Pmdd on se retrouvera au Sido. Je ferai une vidéo Mike
En attendant je prépare une vidéo du salon Global industrie où il y a tous les fabricants de robots indus. C'est monstrueusement grand
Posté par
sur 14 avril 2019 - 10:37
dans
Général
Hello,
Voici ma petite vidéo du SIDO 2019 
Moi ca m'éclate encore ces salons, on trouve quand même des choses nouvelles en cherchant bien par ex. ce petit bras démonstrateur de smartphone, bien mignon.
Surtout j'ai fait beaucoup de promo pour notre concours. J'espère notamment que des jeunes de Robo'Lyon vont se décider à participer après la Robotique FIRST. Pas besoin d'aller à Montréal pour trouver un super concours 
Posté par
sur 21 avril 2016 - 03:48
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Super impressionnant en effet. Surtout Atlas. 2 remarques quand même :
- sur la première vidéo, rien n'indique que le présentateur aux couleurs du PSG n'est capable de se déplacer ni même de bouger la tête
- sur la seconde quand Atlas tombe, il met bien 3 fois plus de temps à se relever que mon propre bipède !!! 
Posté par
sur 27 janvier 2019 - 10:17
dans
Lego
Excellent ton nouveau sujet
pour le relief on va faire soft comme je disais sur ce message
pas de marche mais des pentes douces pour descendre de 2cm progressivement sur environ 4cm.
Posté par
sur 04 février 2019 - 03:25
dans
Lego
Excellente ta dernière vidéo avec le retournement de dés.
Et je m'aperçois que votre concours n'est pas du tout évident...
C'est vrai et du coup on est bien dans l'esprit Ninja Warrior (Beaucoup sont prêts à essayer mais personne n'a jamais réussi à terminer en France! )
Posté par
sur 09 décembre 2017 - 11:05
dans
Apérobots et autres rencontres IRL
ok Levend, c'est dans le calendrier en attente de validation
Posté par
sur 08 décembre 2017 - 05:46
dans
Apérobots et autres rencontres IRL
Hello !
L'association Machine Gones vous convie à un apérobot à Lyon la semaine prochaine.
Rejoignez-nous le mercredi 13 décembre 19:00-22:00, au 6 Rue Saint-Georges, 69005 Lyon, pour boire une bière et parler robot ![]()
N'hésitez pas à faire passer l'info, pour avoir la salle, le deal est de consommer une trentaine de bières (2 ou 3€ ) !
Posté par
sur 19 avril 2016 - 07:44
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 30 janvier 2016 - 02:08
dans
Et si vous vous présentiez?
Je lis ce forum depuis 1 semaine et je me décide à me présenter.
Je travaille dans une ESN sur des projets de développement d'appli...
En parallèle je m’intéresse depuis 1 an à la robotique. Avant ça j'avais commencé un autre projet avec un microcontrôleur Atmel ATtiny. Du coup je suis parti de là pour essayer de commander un premier servomoteur.
Ensuite il m'est venu l'idée saugrenu de tenter de faire un robot "humanoïde" avec 6 petits servomoteurs 9g et des lego duplo.

J'ai programmé un semblant de mouvement de marche en coordonnant ces 6 servos mais vu leurs faibles puissances, le robot s'est effondré dès que je l'ai posé au sol.
J'ai retenté l'expérience avec des servos beaucoup plus puissants (Blue Bird BMS-620MG) et pour les fixations, des équerres (en zinc) pour meubles.
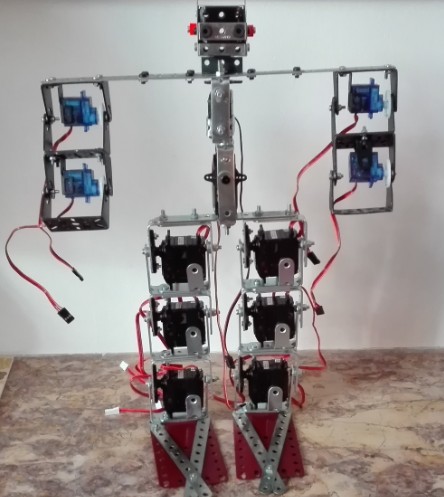
Cette fois le robot était beaucoup trop lourd et ces servos ne gardent pas leur position à moins de les maintenir constamment sous tension en leur demandant de maintenir un angle. J'ai fini par en griller la moitié.
Finalement le troisième essai a fonctionné. 6 servos SpringRC SR-402P et des fixations en alu que j'ai usiné (j'ai trouvé des petites barres d'1m chez casto). Au passage j'ai changé de microcontrôleur pour un ATMega8 qui me permet de programmer les mouvements plus précisément (j'étais aux limites de la mémoire de mon ATTiny2313).
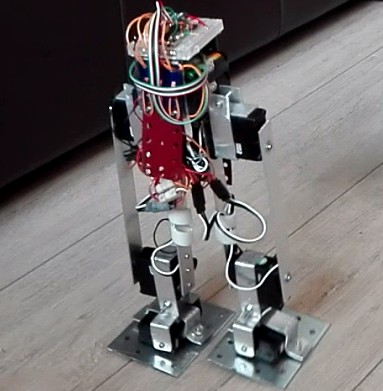
Le robot se déplace de façon stable et à une vitesse que je trouve satisfaisante.
Naturellement la démarche n'est pas fluide avec seulement 6 DOF mais je suis ravi d'avoir atteint ce premier objectif
A présent je suis en train d'ajouter des bras en gardant une approche très minimaliste.
Mon prochain objectif, faire un petit combat pour le fun avec le robonova d'un des organisateurs pendant le tournoi de Nîmes en mai prochain.
@+



Posté par
sur 01 février 2016 - 03:22
dans
Et si vous vous présentiez?
Merci pour l'accueil et l'invitation à votre idée de malade http://www.robot-maker.com/forum/topic/10110-robot-de-combat-revisite/
Vous êtes partis super loin ! why not
Pour la vidéo du dernier né, en fait je viens de démarrer un sujet qui lui est dédié http://www.robot-maker.com/forum/topic/10225-robot-bipede-pour-le-tournoi-de-nimes-en-mai-2016/
Posté par
sur 12 mars 2019 - 08:51
dans
Contenu vidéo
Merci Mike pour tes retours !
Je viens d'ajouter le code et la liste de matériel dans la description.
Je ferai aussi une prochaine vidéo pour expliquer le code.
Pour le L9110 en 12V en fait je ne l'ai pas précisé mais dans la vidéo à 6" je teste déjà avec un coupleur 8 piles.
Je trouvais que ca commençait à sentir le chaud donc j'ai arrêté là.
En comparaison le L298N a un bon dissipateur thermique donc ça doit bien aider.
En tout cas très intéressant ton "Micro Magician Robot Controller"
Posté par
sur 11 mars 2019 - 11:26
dans
Contenu vidéo
Mode reportage sur ma dernière vidéo :
J'ai l'impression d'avoir mis 10ans pour la monter...
Pour la première fois j'ai pris le challenge de me filmer en déambulant dans le salon vers 12" 
@Mike, Je fais référence à la boutique robot-maker.com dès la première minute !
@tous Qu'est-ce que vous en pensez ?
Posté par
sur 08 mars 2019 - 05:13
dans
Contenu vidéo
Coucou,
Comme conseillé par Mike, voici ce petit thread pour recueillir vos feedbacks sur mes vidéos (j'ai hâte) !
Tout conseil et remarque sur le contenu technique sont les bienvenus.
Évidement si vous avez aussi des conseils sur la forme ça me permettra de m'améliorer
En tout cas le timing est parfait car ma chaine à atteint les 100 abonnés à l'instant !
J'en profite pour vous montrer mes 2 vidéos du jour. Tir groupé car vidéos en lien l'une par rapport à l'autre. Je me suis bien amusé.
Posté par
sur 12 avril 2016 - 12:59
dans
Et si vous vous présentiez?
Je vous propose de venir vous affronter sur le ring du tournoi avec vos robots
Mais effectivement avant de parler de l'évènement, comme on est dans la page de présentation est-ce que tu pourrais nous dire si tu t’intéresses à la robotique ou comment vous avez eu l'idée/l'opportunité de faire la promo de l'évènement ?
Sinon R1D1, Fabien tu me corrigeras si je me trompe mais les inscriptions pour les Robot Sumo sont terminées.
Par contre on peut encore s'inscrire à la compétition de robot Lego pour les enfants et surtout si tu as un robot humanoïde, je pense que tu peux participer au combat puisque l'organisateur a indiqué sur son site "Deux robots devraient être prêts pour cette démonstration. En attendant, que d’autres participants osent se présenter."
Posté par
sur 04 janvier 2021 - 02:24
dans
Bras robots, pinces, tourelles, et autres manipulateurs
C'est un programme Arduino mais je le charge sur un ESP32 parce que j'ai pris l'habitude de cette carte et ça ouvre vers pas mal de connectivité (wifi, bluetooth)
Par contre j'ai bien une petite Arduino Nano pour la main. L'idée est d'éviter de tirer les câbles des 5 servo 9G des doigts sur tout le bras. Je limite à 3 fils (2 pour l'alim de l'arduino et des servos + 1 fil de commande) pour l'instant dans mon premier test sur la vidéo, je ne fais passer qu'un signal haut ou bas dans le fil de commande et l'arduino exécute des gestes prédéfinis mais après je tenterai de faire une liaison série entre mon ESP32 et l'arduino pour échanger plus d'infos.
Aujourd'hui je n'ai pas reproduis mon soucis sur les servos des épaules. J'ai du le régler en même temps qu'un autre pb d'alim que j'avais..
Par contre j'ai un gros soucis mécanique sur lequel j'aimerais bien votre aide :
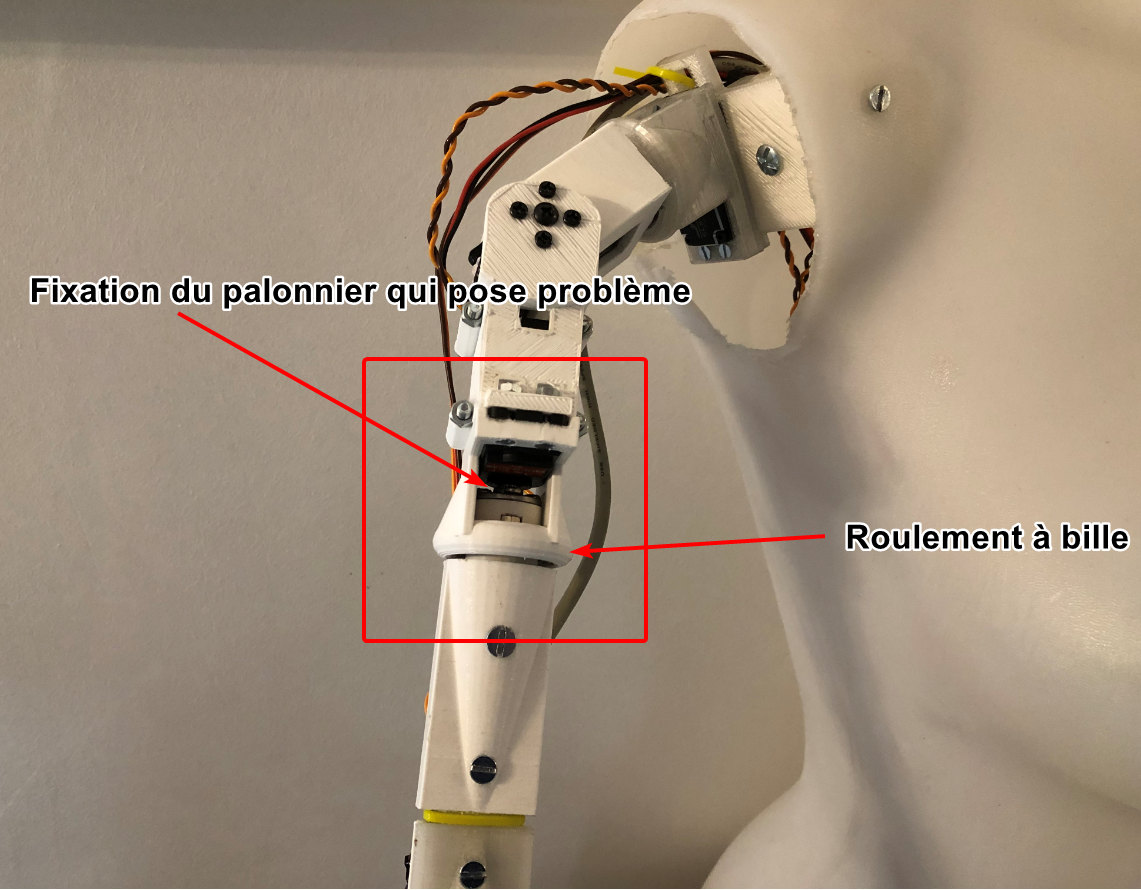
A trois endroits du bras (épaule, coude et poignet) j'ai dessiné une pièce pour faire une rotation.
Pour info pour ne pas faire porter tout le poids sur l'axe des servos, je fais tourner la pièce dans un roulement à bille maison. Seules les billes sont en métal. J'ai dessiné la pièce qui contient les billes en partant d'un donuts sous blender.. On verra si ça tient le coup.
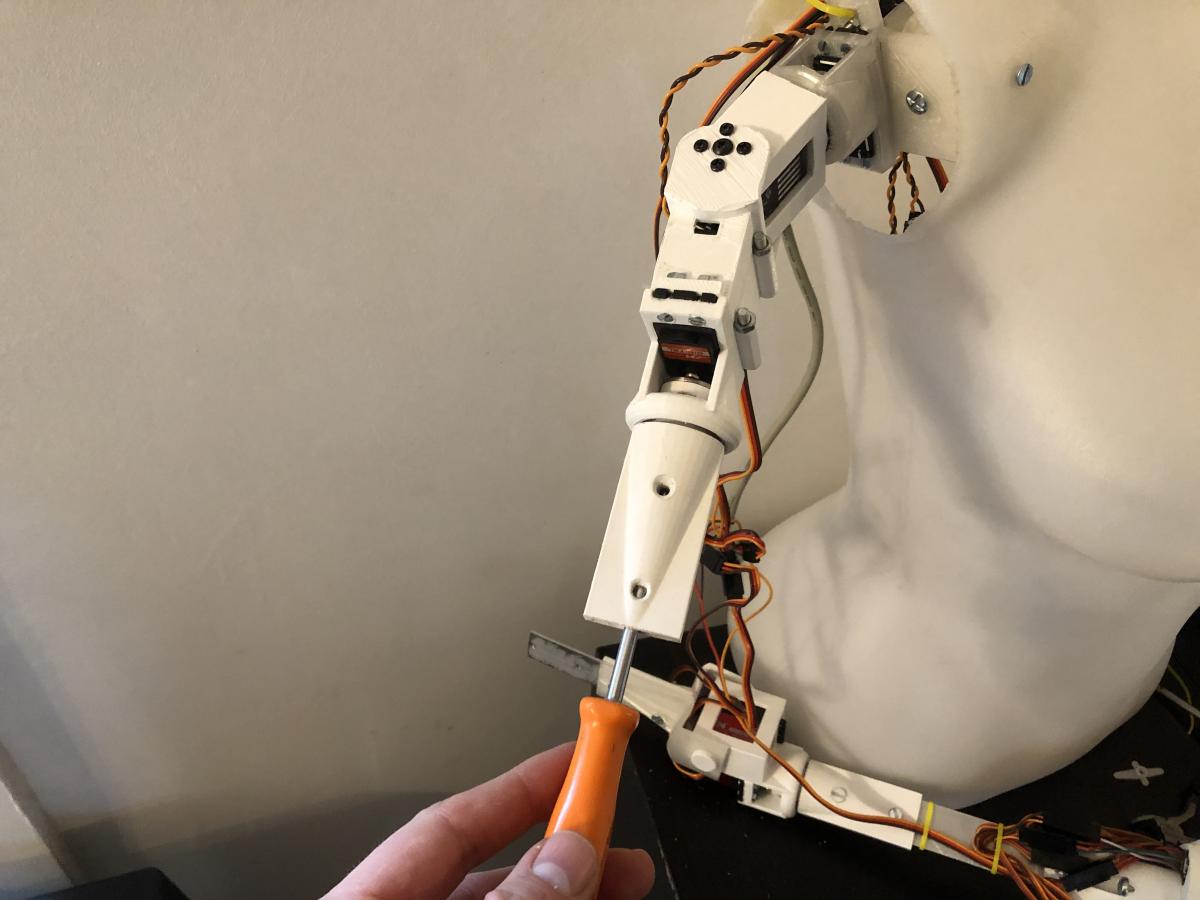
Mais le problème se trouve au niveau de la vis qui relie le palonnier et le servo. Après avoir joué avec le bras ce week-end, aujourd'hui je vois qu'il commence à y avoir du jeu. La vis s'est un peu desserrée c'est ce que j'appréhendais.
Pour y accéder, j'enlève le membre inférieur :
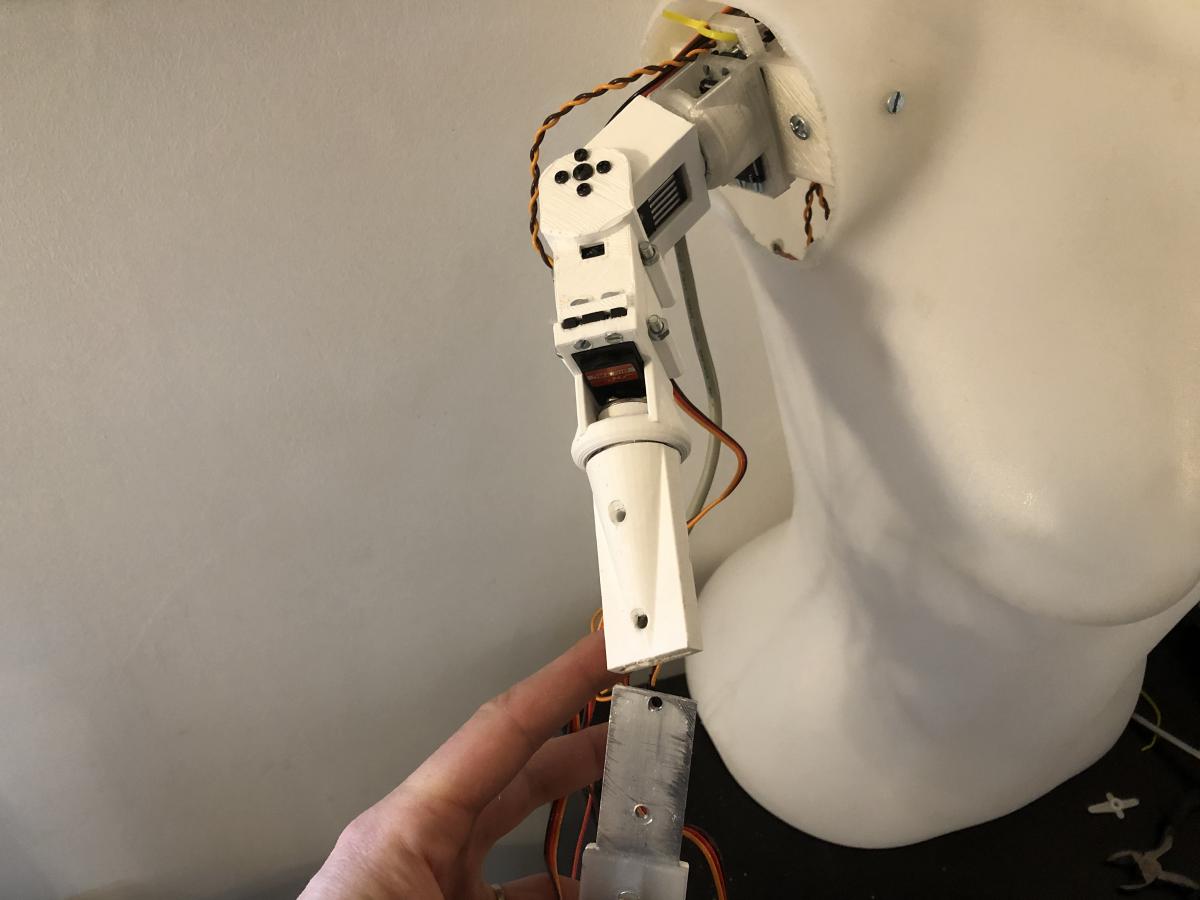
Et je vis en faisant passer le tourne vis dans la longueur de la pièce
Je crois qu'on en avait déjà parlé pour mes bipèdes, il y a une sorte de fillasse qui existe pour éviter le desserrement ?
Sur mes bipèdes je revisse assez souvent mais ça va tout est apparent. Là ca me demande à chaque fois de tout démonter donc problème.
Posté par
sur 03 janvier 2021 - 11:41
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Hello, voici mon nouveau projet : un mannequin robotisé.
J'ai dessiné/imprimé 3D toutes les pièces du bras. 5 DOF
J'avance dessus petit à petit depuis quelques mois.
Pour la main je suis reparti du modèle open-source ADA d'Open Bionics dispo sur thingiverse
mais je n'ai gardé que la coque. J'ai entièrement refait l'intérieur pour y loger des servos 9G plutôt que les Firgelli PQ12 à 60€ pièce (donc 600€ pour les 10 doigts des 2 mains..).
Là j'avoue que je n'ai rien inventé, je suis tombé sur cette page (en mode site web de l'an 2000) mais qui regorge d'ingéniosité. Ce gars a eu une super idée mais il ne s'est pas pris la tête à redessiner la main... C'est ce que j'ai entrepris.
Ca commence à ressembler à quelque chose :
Je précise tout de suite : pour moi l'objectif est de programmer le mannequin pour l'animer, voir danser ? mais les bras et les mains ne sont pas conçus pour porter autre chose que leur propre poids.
Quand je serai satisfait de la main, je la reverserai sur thingiverse en tant que remix de la main ADA.
Je mettrai aussi l'ensemble du bras si ça peut intéresser quelqu'un
Qu'en pensez-vous ?
Posté par
sur 04 janvier 2021 - 09:16
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Merci Oracid.
Dans l'épaule j'ai mis 2 servos JX CLS-12V7346 46KG 12V

Je les ai choisis pour leur couple et leur vitesse.
Intuitivement j'ai pensé qu'il valait mieux passer sur du 12V pour avoir une vitesse supérieure.
J'avais fait un premier test sans la main donc beaucoup moins de poids, ça allait assez vite mais j'ai rapidement cassé les palonniers en plastique d'origine. Par rapport au couple je ne comprends pas ce choix de fournir du plastique, je les ai remplacé par des palonniers en métal :

Je referai un test de vitesse maintenant que la main est au bout du bras mais j'ai un problème à résoudre :
Pour l'instant j'alimente les 2 servos 12v de l'épaule avec une alim. 12V 20A.
Après quelques secondes à simplement tenir une position, un des servo lâche tout. Il faut que je comprenne si c'est l'alim qui sature ou le servo qui a un problème. Pour la vidéo je n'ai branché qu'un des servos de l'épaule du coup.
Pour le reste du bras c'est 3 servos plus classiques de la boutique : JX PDI-6221MG 20KG sur lesquels j'ai mis également des palonniers en métal





