Je connais bien cette batterie, elle m'a lachée après 5 charges

Bon bah j'ai encore eu moins de chance que toi ... HS après seulement 2 cycles de charge ..
Du coup qqun connait une batterie en 12V 20Ah le plus compacte possible 😂?
Il y a 43 élément(s) pour N1oN4o (recherche limitée depuis 12-juin 13)
 Posté par
sur 08 juin 2019 - 04:25
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 08 juin 2019 - 04:25
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je connais bien cette batterie, elle m'a lachée après 5 charges
Posté par
sur 17 mai 2019 - 12:33
dans
Robots roulants, chars à chenilles et autres machines sur roues
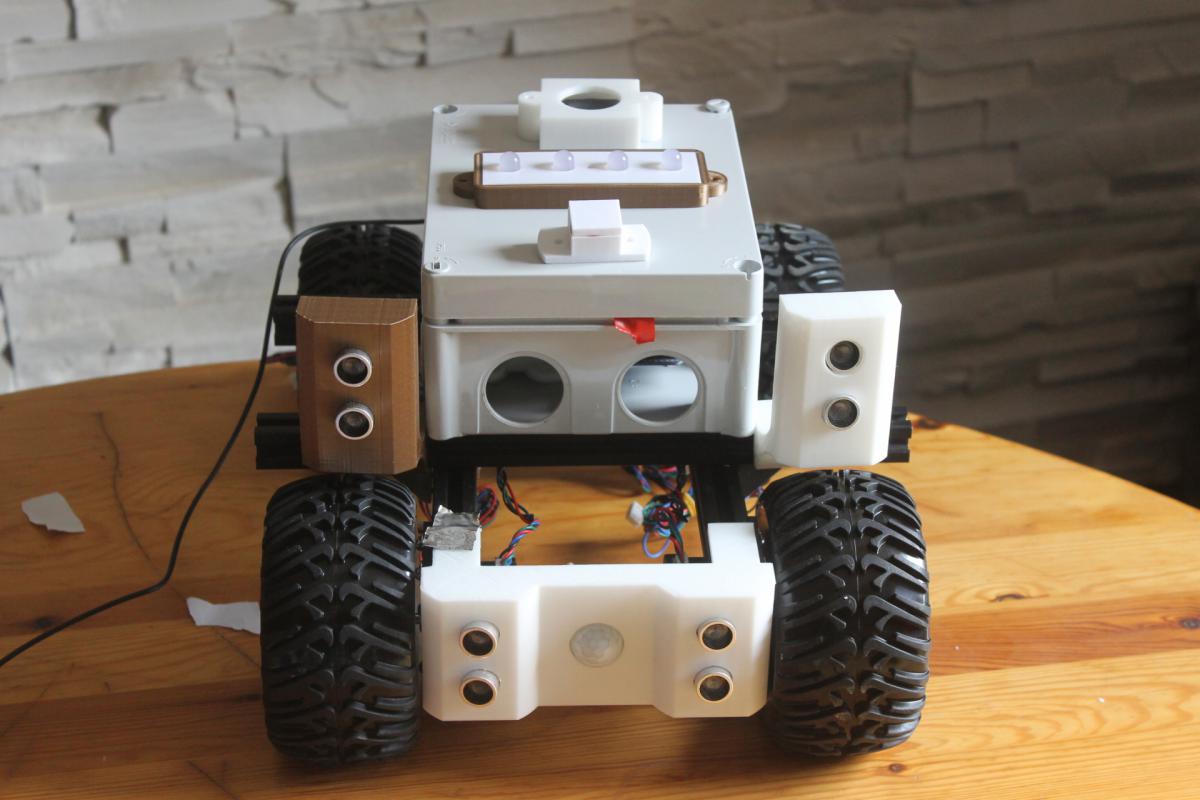
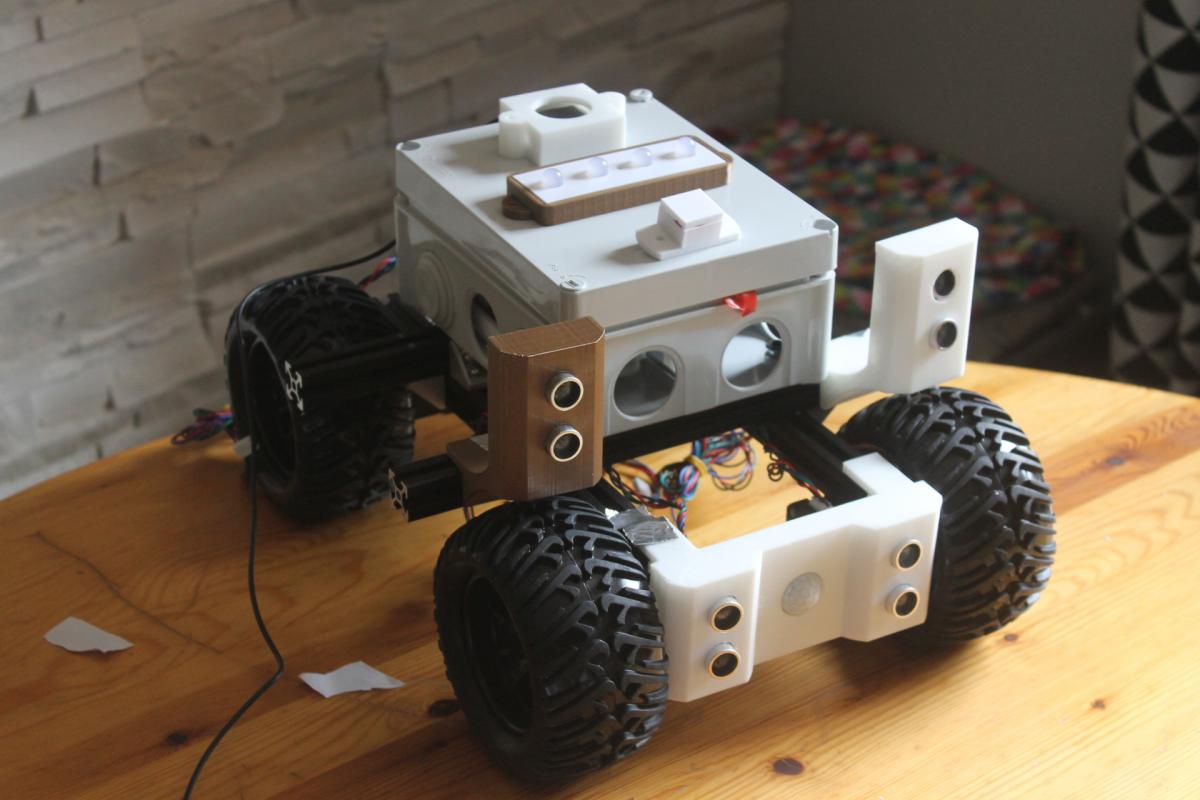
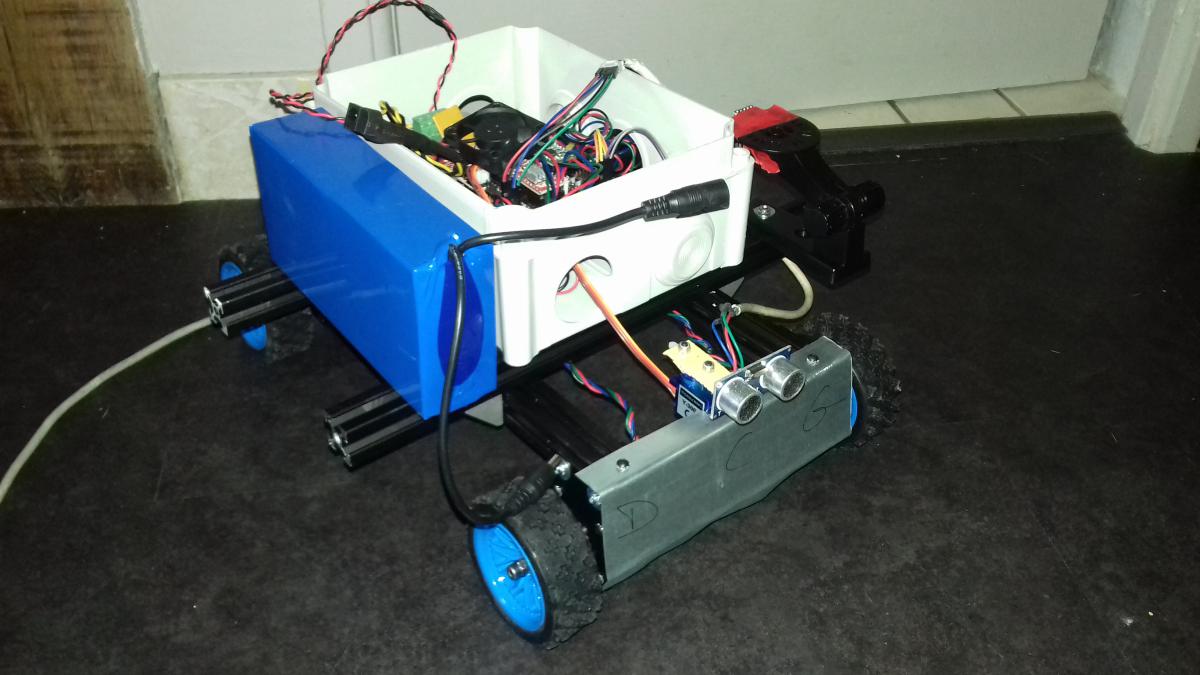
Les impressions avancent bien !
Il y a donc :
- les 2 supports latéraux avec chacun un capteur ultrason
- le bumper avant avec 2 capteurs ultrason et un capteur PIR
- le bloc de LEDs
- le support pour le compas numérique
- le cache pour l'antenne GPS
- la 1ère fixation de ma batterie
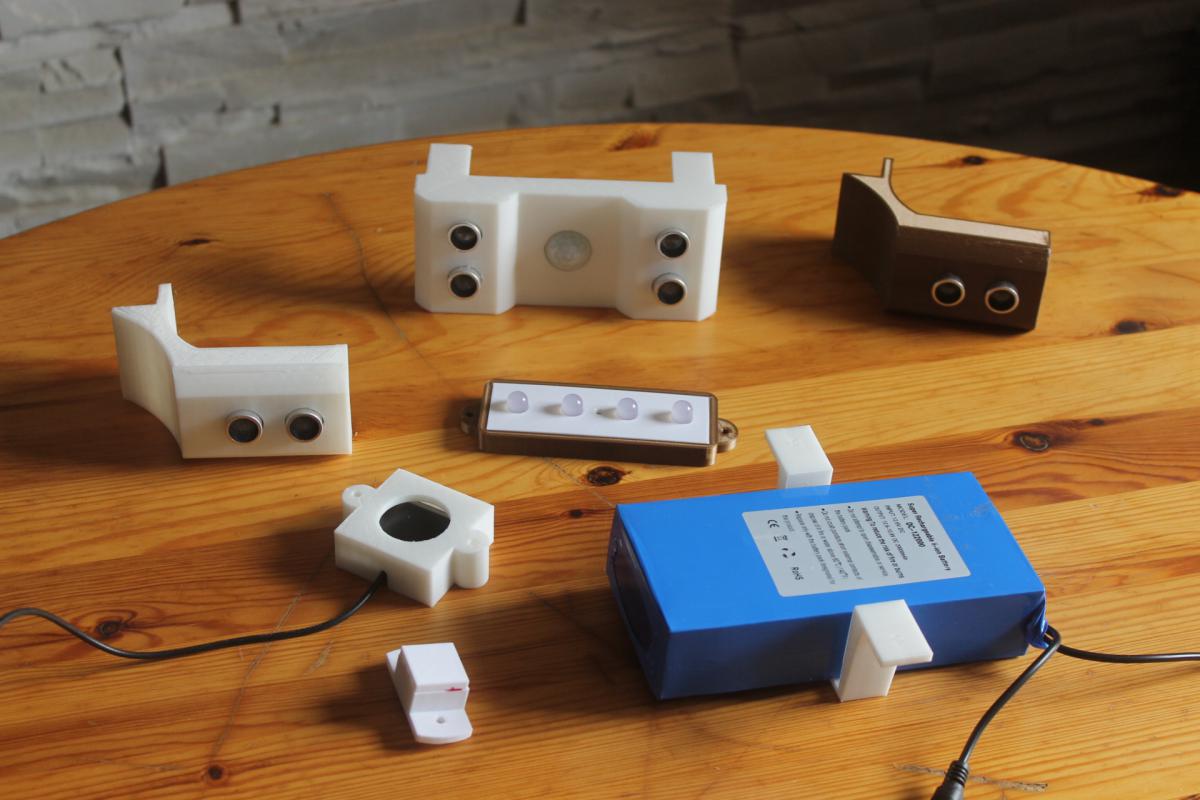
Mis à blanc (scotchés pour être plus exact^^) , aucun des composants n'est fixé pour l'instant  !
!
Ma carte électronique est arrivé. J'ai commencé à assembler les composants. J'ai été un peu radin niveau espacement des connecteurs
mais ça ira .
(avec son support)
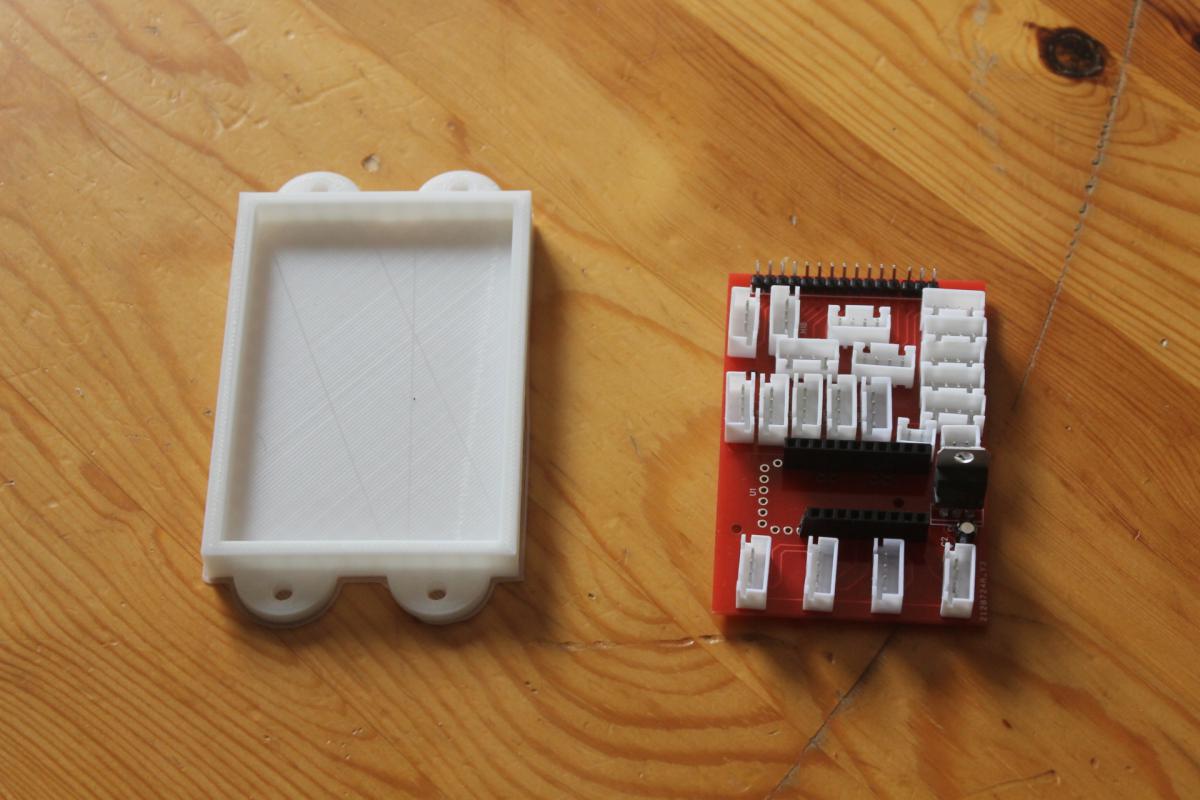
et dans la boite de dérivation :
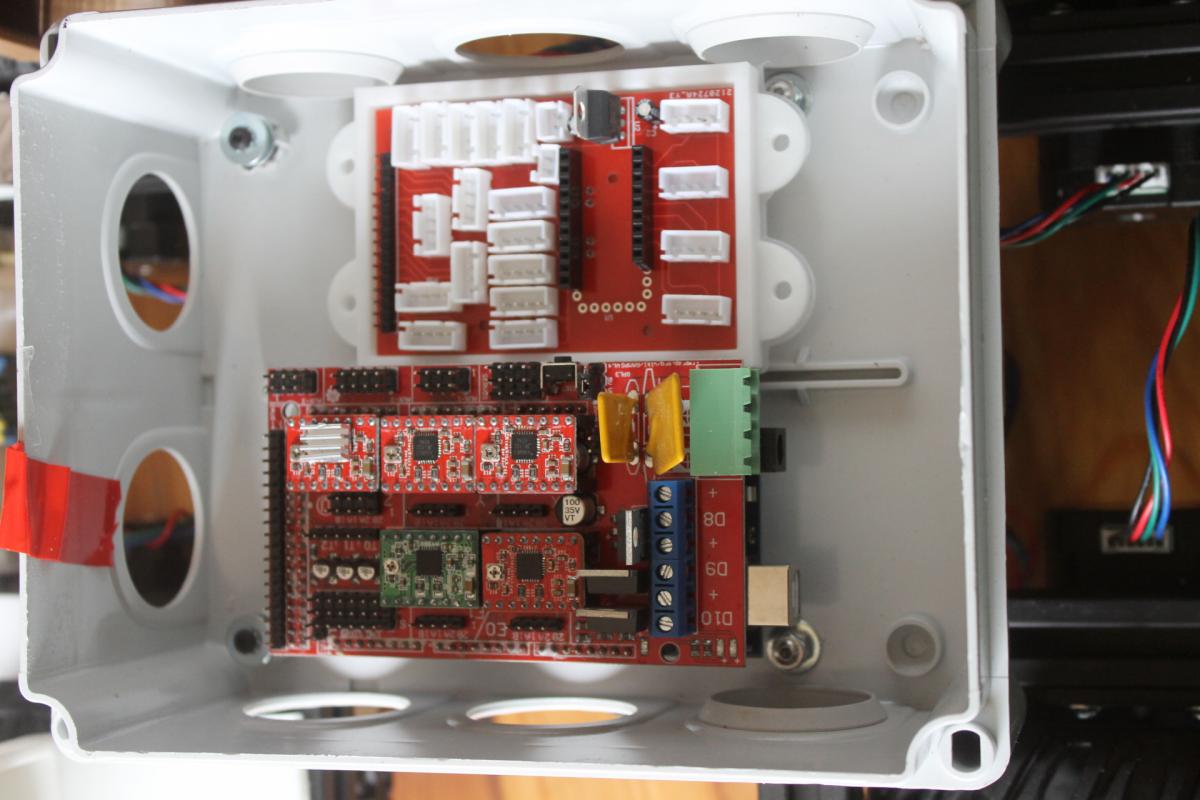
J'ai encore quelques bricoles à modéliser/imprimer et il me manque des "mini-vis" pour fixer mes modules Arduino.
Posté par
sur 27 avril 2019 - 08:02
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 17 mai 2019 - 05:07
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 05 mai 2019 - 03:44
dans
Robots roulants, chars à chenilles et autres machines sur roues
J'ai remplacé le couple servo/HC-SR04 par 4 HC-SR04 fixes .
Ils sont gérés par une ProMini qui communique avec la Mega/Ramps1.4 via un port série virtuel.
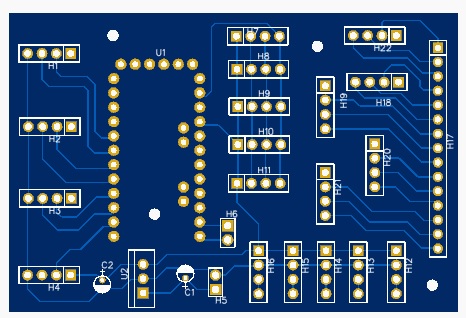
Afin d'optimiser le câblage, j'ai dessiné un PCB où il y aura :
- la Pro Mini 5V
- les 4 HC-SR04
- des slots pour des modules I2C (extension de la Ramps 1.4)
- des slots pour des composants analogiques/numériques divers (extension de la Ramps 1.4)
- des slots pour des leds RGB (extension de la Ramps 1.4)
- du 5V
- un connecteur pour relier les 2 cartes (Tx/Rx)
Je repousse l'achat de l'Ender3 mais ma CR10 commence à me manquer ..j'aurais bientôt quelques pièces à modéliser/imprimer.
Posté par
sur 05 mai 2019 - 07:17
dans
Robots roulants, chars à chenilles et autres machines sur roues
Merci !
Je "pratique" l'Arduino depuis 6 ou 7 ans plus ou moins régulièrement . Je n'ai jamais fait de projets "mécaniques" à proprement parler mais j'ai fait pas mal de projets de suivi/régulation : la serre de mon jardin , le caisson de mon imprimante 3D , un mini datalogger pour ma moto et une couveuse pour oeufs dernièrement , et un peu de "domotique" , plus 2 ou 3 autres bricoles que j'oublie  .
.
Je bosse dans le domaine des systèmes embarqués pour de l'instrumentation/métrologie en industrie donc ça m'aide beaucoup .
J'espère que je réussirais à rendre ce robot le plus autonome et abouti possible . Il y a des domaines où je me débrouille mais d'autres que je connais pas du tout ou trés mal comme la mécanique "théorique" ou le côté Internet/Serveur niveau programmation .
Et le gros morceau dernièrement que j'ai abordé c'est la modélisation puis la conception de pièces imprimées 3D : c'est chronophage mais tellement utile quand on bricole/bidouille ^^ !
Posté par
sur 04 août 2016 - 08:12
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
!
Posté par
sur 03 mai 2019 - 12:10
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 15 mai 2019 - 06:52
dans
Conseils et aide aux débutants, livres et kits en robotique
Si j'avais un conseil à "donner" , ça serait le suivant : un projet doit correspondre à un besoin (important ou non) .
Ne faites pas à un robot (ou tout autre sorte de projet) s'il n'y a pas de réels intérêts derrière.
Faire un bon cahier des charges/objectifs permet également une meilleur organisation du projet ..
Posté par
sur 27 avril 2019 - 05:58
dans
Electronique
Les temps de montée/descente d'une sortie digitale sont de quel ordre ?
Ca peut jouer un peu sur la forme et la fréquence de ton signal j'imagine .
Posté par
sur 08 mai 2019 - 07:13
dans
Programmation
Tu cherches quoi comme précision ? Le mètre ? 30 cm ? moins ?
Posté par
sur 03 septembre 2016 - 06:50
dans
Electronique
Qu'est ce que tu veux dire par "capteur ponctuel" ?
Il a l'air intéressant ...
Posté par
sur 25 avril 2019 - 09:35
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Posté par
sur 03 août 2016 - 11:01
dans
Et si vous vous présentiez?
Posté par
sur 01 août 2016 - 01:05
dans
Et si vous vous présentiez?
. !
Posté par
sur 10 avril 2019 - 05:37
dans
Et si vous vous présentiez?
Déterrage de b*ta*d !
2 enfants plutard, j'ai enfin commencé mon Robot Patrouilleur !
Je vais lui faire un topic !
Posté par
sur 17 avril 2019 - 12:13
dans
Conseils et aide aux débutants, livres et kits en robotique
Posté par
sur 15 mai 2019 - 08:12
dans
Physique et mathématique
Bonjour à tous .
Je cherche un site pour apprendre/comprendre tout ce qui concerne le GPS .
Mon niveau dans ce domaine est proche de zéro donc j'aimerais acquérir des connaissances sur tout ce qui est (dans le désordre) : latitude , longitude , azimuts , cap , décodage de trames etc etc
Hormis Wikipedia , avez vous des liens à partager qui explique plus ou moins "vulgairement" la théorie ?
En pratique , j'utiliserais un module GPS type adafruit avec une bibliothèque (surement TinyGps) avec des fonctions toutes prêtes mais
je voudrais comprendre comment tout cela marche pour palier à d'éventuels problèmes qui pourraient arriver !
Le but final étant que Hashtag, mon robot patrouilleur, puisse suivre un trajet composé de plusieurs coordonnées GPS .
D'avance , merci !




