Sinon pour la détection d'obstacle je vais essayer ça
https://www.element1...ng-on-logi-bone
C'est moins gourmand
Il y a 244 élément(s) pour Gyro49 (recherche limitée depuis 09-mai 13)
 Posté par
sur 13 décembre 2016 - 09:39
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 13 décembre 2016 - 09:39
dans
Robots roulants, chars à chenilles et autres machines sur roues
Sinon pour la détection d'obstacle je vais essayer ça
https://www.element1...ng-on-logi-bone
C'est moins gourmand
Posté par
sur 02 décembre 2016 - 05:17
dans
Reventes, matériel d'occasion, récup
question bruit ça ressemble à une perceuse
Pour le 90 c'est : analogWrite(enA, 90);
Avec du 12 volt en tout ou rien,je vais mesurer ça se soir si j'ai un peu de temps
Posté par
sur 02 décembre 2016 - 12:14
dans
Reventes, matériel d'occasion, récup
En ce qui me concerne je travail sur :
J'ai réussi à le raccorder sur :
https://www.amazon.f...o/dp/B013QTC18K
Maintenant, en dessous d'une commande à 90 le moteur broute.
Posté par
sur 01 décembre 2016 - 05:56
dans
Reventes, matériel d'occasion, récup
Bonjour
As tu trouvé le moto réducteur ?
Posté par
sur 22 novembre 2016 - 05:40
dans
Mécanique
Bonsoir,
Pour les roues Rouge de Chez Leroy Merlin, il n'y a pas de roulement mais les mêmes chez Brico dépot ont des roulements....
Pour les fixations il devrait y avoir un tutoriel avant la fin d'année si tout se passe bien.
A bientôt
Posté par
sur 28 octobre 2016 - 10:58
dans
Programmation
Bonjour,
Vraiment conne la question, mais est ce que tu as démarré la carte Raspberry avec quelle OS ?
Posté par
sur 27 octobre 2016 - 01:39
dans
Impression 3D et Imprimantes 3D
Pour moi avec un moulage, ou c'est mieux une copie de la pièce c'est plus facile de faire une modélisation 3D.
Sauf erreur de compréhension, il suffirait de faire comme un relevé topographique et de relier les courbes de niveaux pour créer un volume.
Serait-il possible d'avoir une photo de la pièce ?
Posté par
sur 27 octobre 2016 - 11:07
dans
Impression 3D et Imprimantes 3D
Bonjour,
Un contact serait-il envisageable avec:
-le constructeur
-des collectionneurs qui aurait une maquette réaliste donc ils auraient eu accès à des schémas
-une casse automobile pour faire un moulage de la surface style empreinte en platre
Bonne chance
Posté par
sur 24 octobre 2016 - 05:15
dans
Et si vous vous présentiez?
Bonjour,
Soit assurer que tu auras de l'aide .... si nous avons les réponses.
Dans le cas contraire, il y a pleins d'idées à glaner.
A bientôt
Posté par
sur 24 octobre 2016 - 11:17
dans
Programmation
Bonjour
Je serais également pour te conseiller le python.
Pour ton projet, tu as
l'hyperclasse:
le moins classe :
En ce qui concerne le niveau d'eau
->http://www.framboise314.fr/une-mesure-de-niveau-deau-avec-un-raspberry-pi/
A bientôt
Posté par
sur 05 juillet 2016 - 05:15
dans
Programmation
Bonsoir,
Je n'arrive pas à visualiser la notion d'exosquelette.
Je sais ce que c'est mais comment il s'imbrique dans le projet HumaOne, de se fait j'ai plusieurs questions ?
Si HumaOne fait bougé son coude, est-ce l'exosquelette sera en esclave pour reproduire le mouvement ?
Lors du déplacement de l'épaule de l'exosquelette, l'épaule de HumaOne n'aura pas encore atteint la position final donc conflit maître ->esclave ->maître
Sinon, personnellement je prendrais la deuxième hypothèse : envoyer en un seul message les valeurs des potars séparés par les drapeaux de référence.
Est-ce qu'il ne serait pas possible de mettre en place un arduino en maître (commande HumaOne et émission) et un simple atmega (en shield) en réception les deux en communication rx/tx pour être sûr de ne pas rater une trame.
Bonne chance
Posté par
sur 01 juillet 2016 - 04:33
dans
Robots roulants, chars à chenilles et autres machines sur roues
Bonjour,
Pour l'ajout de la caméra avec reconnaissance QRCODE, c'est le moment exacte
https://boutique.ed-...agazine-13.html
mais aussi
https://boutique.ed-...gazine-195.html
Bonne vacances à toutes et à tous
Posté par
sur 28 avril 2016 - 04:36
dans
Electronique
Bonjour,
Une première question sera sur la taille de l'engin.
En ce qui me concerne, le poids de la batterie pourrait servir de contre poids.
Sachant qu'il faudra bien la recharger un jour et sur un robot sphérique c'est moins facile sans un chargeur à induction.
Cordialement
Posté par
sur 26 avril 2016 - 01:05
dans
Electronique
Bonjour,
Dans les éventuels combattants il faudrait envisager
http://fr.hobbytronics.co.uk/raspberry-pi/rpi-breakout-boards/pwm-servo
Cordialement
Posté par
sur 05 avril 2016 - 01:13
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
bonjour,
sinon tu as un post qui est fait pour toi
Posté par
sur 04 avril 2016 - 10:07
dans
Hack mod customisations et autres modifications
Bonsoir Path
En fait c'est la commercialisation sur le sol français.
Maintenant, je pense que l'intérieur d'une carte de jeu est identique à une R4+micro SD.
Concernant le navigateur, le déplacement dans les pages internet peut se faire avec les flèches, je vais essayer avec javascript mais je un doute pour les autres boutons.
Posté par
sur 04 avril 2016 - 03:22
dans
Hack mod customisations et autres modifications
Bonjour,
Je vais vous présenter dans les futurs post un projet de robot à base de raspberry et télécommandable depuis une Nintendo DS.
Il faut faire attention au temps et aux formulations de phrases car la réalisation de ce projet n'est envisageable que si la personne dispose de la fameuse carte R4 qui est interdite en France.
Le projet reprendra une grande partie du tuto que j'ai proposé jeudi dernier : "Projet NinPi".
Pour mémoire une Nintendo DS dispose :
des boutons haut, bas, droite et gauche
des boutons A, B, X et Y
des boutons L er R
deux écrans superposé (ce lui du bas étant tactile)
Il me semble qu'elles ont toutes (suivant les versions) le wifi.
Et sans oublier de renouveler l'avertissement : c'est un projet théorique bien-sur.
Posté par
sur 29 mars 2016 - 02:12
dans
Electronique
Bonjour,
sinon vous pensez quoi du recyclage d'un convertisseur allume cigare (12v) ->usb (5v)
Posté par
sur 16 mars 2016 - 04:51
dans
Energie
Bonjour,
Essaye de faire un copier/coller
Posté par
sur 04 mars 2016 - 12:24
dans
Machines de fabrication
En effet les connecteurs ne sont pas fait pour ça, mais il supportent bien la charge.
J'ai un peu triché, comme c'est des DB25, j'utilise une paire pour un signal, doncpour les 6 fils du moteur j'utilise 12 fils du cable imprimante.
Pour la question du jeu, je n'ai rien remarqué, maintenant l'utilisation c'est :
-gravure de PCB
-usinage de PVC, il faut être patient et ne pas trop en demander à chaque passe.
J'ai l'intention de ma faire une imprimante 3D, donc je vais commander de plus gros moteurs pour la CNC et échange avec la 3D
A y refaire, je mettrais mes controleurs plus près des moteurs.
Posté par
sur 04 mars 2016 - 09:25
dans
Machines de fabrication
Posté par
sur 27 février 2016 - 07:43
dans
Machines de fabrication
Oups j'ai bien une photo global que j'ai oubliè

Posté par
sur 27 février 2016 - 05:25
dans
Machines de fabrication
Bonjour,
Je suis de retour avec ma CNC entièrement bricolage maison
Donc pour 150 euros:
1 raspberry (35 euros)
1 Atmega 328p avec son quartz 16MHz et ses deux condensateur (5 euros)
3 moteurs pas-à-pas (3x15euros)
3 Contrôleurs de Moteur Pas-à-Pas EasyDriver (3x10 euros)
1 alimentation 12 v (récup sinon 15 euros sur amazon)
Tube acier diamètre 20 mm de chez brico dépot 4x1.00
Tige filleté de 8 mm de chez brico dépot 2x0.80euro
Tige filleté de 6 mm de chez brico dépot 1x0.80euro
équerre alu (pour les chariots de déplacement) bricot dépot
Roulement à bille de Roller de chez Décathlon
les chevilles laiton et les entretoise sont de leroy merlin
Sinon le bois c'est de la récup.
Les ressorts récup garagiste
option:
-un boitier CPL 15 à 20 euros permet d'envoyer par réseau de mon buerau à l'autre bout du sous-sol les GCode à réaliser.
Ci-dessous la CNC et son boitier gris de controle
Ci-dessous la tige filletée (8mm) de déplacement et écrou allongé (entretoise) et son ressort pour limiter les jeux et l'écrou papillon

Ci dessous l'un des deux rails de dépaclement par axe la tige filletée de 6mm sert à faire la tension sur les roulements

Pour finir mon boitier de contrôle
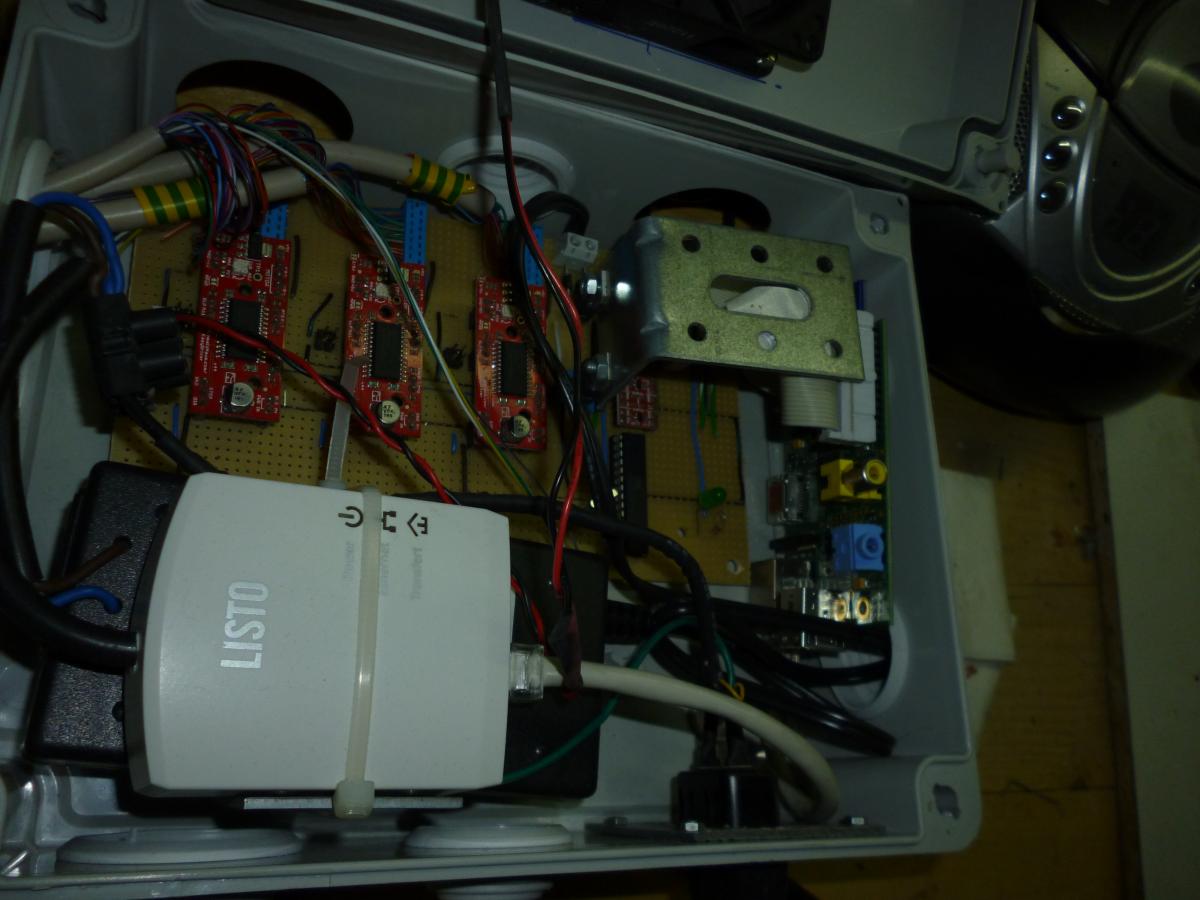
Donc la raspberry pousse dans l'atmega ligne après ligne du gcode via la connexion RX / TX
pour le script python le lien
Pour l'Atmega j'ai suivi cette méthode
Bon c'est vrai je suis plus vers les 170 euros.
A bientôt
Posté par
sur 25 février 2016 - 11:12
dans
Conseils et aide aux débutants, livres et kits en robotique
Bonjour,
Si c'est pour avoir une vision à distance d'un lieu, en effet une caméra IP est suffisante, elles ont des fonctions de survaillance, d'envoi d'e-mail, de vision de nuit.
Personnellement j'ai eu la mienne chez LDLC.com dans le dossier : informatique/réseau/caméra IP
Maintenant si c'est un point de départ pour un projet, est ce que le robot sera mobile ou sur un socle fixe (automate).
une carte Raspebbery se trouve maintant sur Amazon.
http://www.framboise314.fr/une-camera-de-surveillance-video-avec-le-raspberry-pi/
Cordialement
Posté par
sur 23 février 2016 - 12:03
dans
Machines de fabrication
Bonjour
Pour une CNC laser j'avais ça en stock
Si tu veux j'ai fait une CNC format légèrement inférieur au A3 pour 150 euros.
Les photos ce week end.
Pour la fixation des moteurs sur les tiges filletées voir le post
Cordialement




