 Posté par
Posté par
J'ai une arduino et une raspberry, c'est deux choses différentes.
Je suis mauvais dans les deux cartes, mais je me soigne à coup de Doliprane
 /> et de recherche sur le net.
/> et de recherche sur le net.La Raspberry est très récente. Les tutos et les retours d'expérience sont en constante augmentation et si tu regardes bien tu trouves.
Mon projet n°2 sera de controler mon robot via un raspberry avec ou sans arduino avecun dongle wifi. C'est toujours moins dur pour mon porte monnaie que deux modules XBee.
Il y a une revue, je dirais, en Anglais traduit -> the MagPi
En ce qui concerne le prix, sur Kubii c'est 37.99+8.75 de port
Je l'ai acheté là avec un boitier et la livraison une semaine après.
La carte SD 16Go à SuperU -> génial Pour XBNC (média center)
J'attaque l'OpenCV Sous Raspbian -> re-Doliprane
 />
/> Est ce que Robot-Maker serait dans la capacité de récupérer des code de promotion ?
 />
/> Gyro49

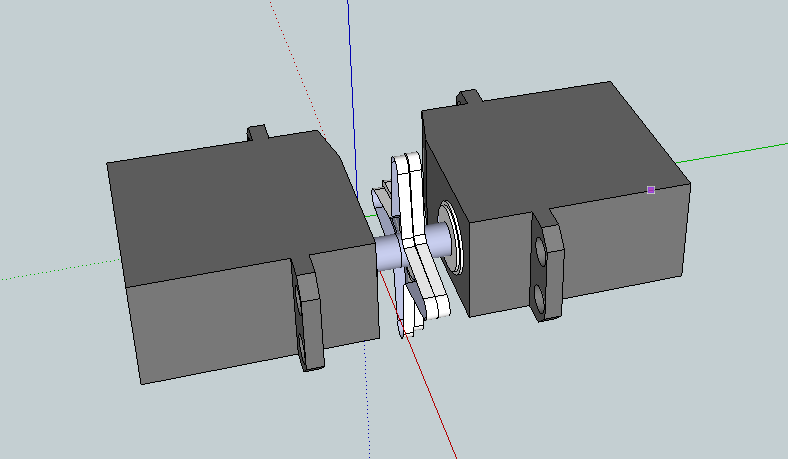

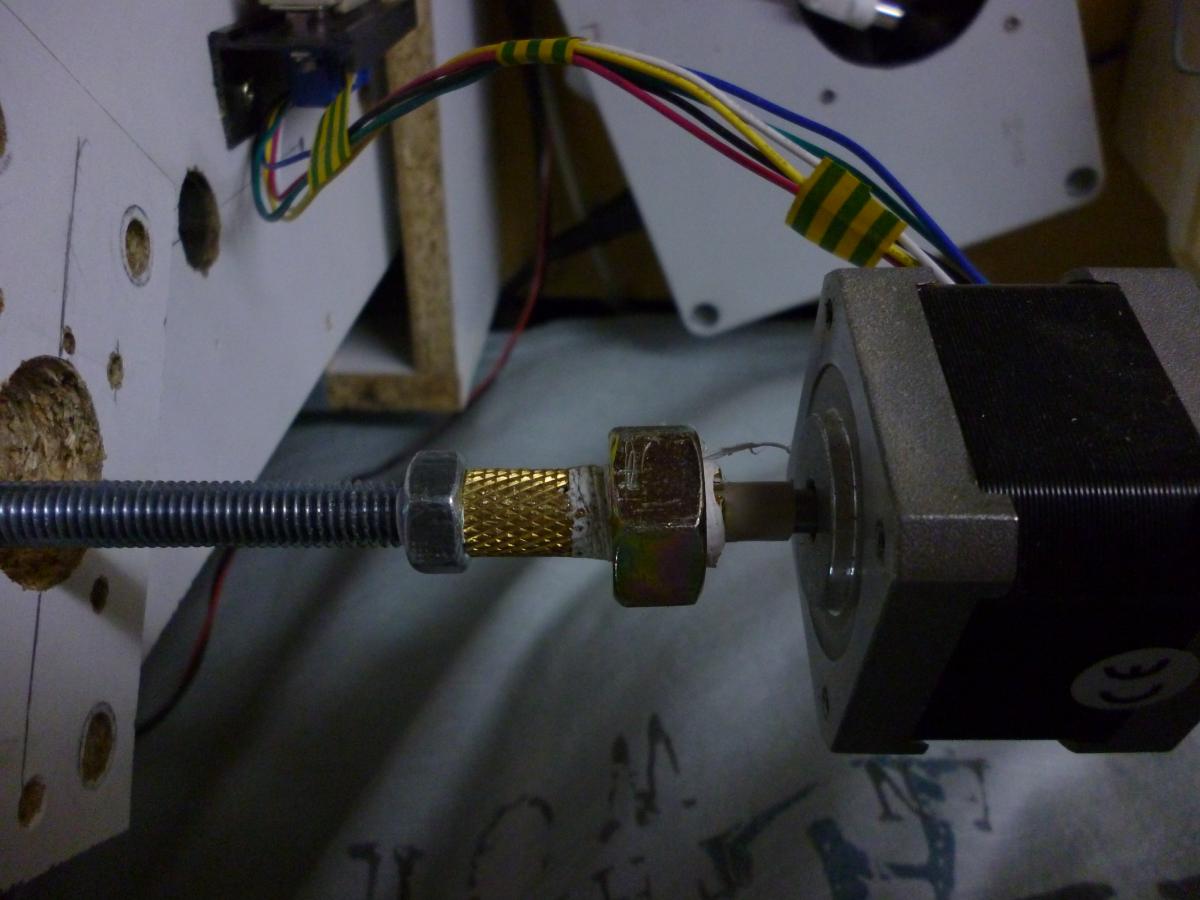
 . Comme la cheville est en laiton elle accepte de ce faire visser par le gros écrou.
. Comme la cheville est en laiton elle accepte de ce faire visser par le gros écrou.






{kind=link}