Ya pleins d'éléments pour les assembler ou y fixer des moteurs ou autres poulies ..
Tu as différentes longueurs et tailles ..
Et sur Ebay ca vaut 3 fois rien

Il y a 43 élément(s) pour N1oN4o (recherche limitée depuis 04-mai 13)
 Posté par
sur 25 avril 2019 - 06:37
dans
Conseils et aide aux débutants, livres et kits en robotique
Posté par
sur 25 avril 2019 - 06:37
dans
Conseils et aide aux débutants, livres et kits en robotique
Posté par
sur 04 août 2016 - 08:04
dans
Robots roulants, chars à chenilles et autres machines sur roues
Donc si ton "result" est négatif , la ligne noire est à gauche , si c'est égal à zéro , elle est au milieu , si c'est positif elle est à droite !
(Sous réserve que ton Sensor[0] soit à l'extrême gauche , le Sensor[1] est à gauche , le Sensor[2] est au milieu , le Sensor[3] à droite , et pour finir le Sensor[4] tout à droite  )
)
Bon courage pour la suite !
Posté par
sur 04 août 2016 - 08:33
dans
Robots roulants, chars à chenilles et autres machines sur roues
result = result +(i-2)*stateSensor[i]*facteurSensor[i];Et normalement ça devrait marcher
!
Posté par
sur 06 août 2016 - 08:26
dans
Robots roulants, chars à chenilles et autres machines sur roues
!
Posté par
sur 07 août 2016 - 07:23
dans
Robots roulants, chars à chenilles et autres machines sur roues
Voila ce que je ferais , si j'ai bien compris ton besoin ..
#define SEUILMINNOIR 270
#define SEUILMAXBLANC 70
uint8_t stateSensor[5];
int value;
void setup()
{
}
/****************Fonction readState**********************/////
void readState() {
for (uint8_t i=1; i<6; i++) // i de 1 à 5 pour les capteurs de 1 à 5 capteur 1 mis sur A1 capteur 5 sur A5
{
value = analogRead(i);
if ( value> SEUILMINNOIR ) // dans ce cas on est sur du noir
{
stateSensor[i-1]=1; // i-1 car on commence un tableau à l'index 0 ... et ici i entre 1 et 5
}
else if ( value<SEUILMAXBLANC ) // dans ce cas on est sur du blanc
{
stateSensor[i-1]=0; // à voir si il faut échanger 0 et 1 entre les deux lignes stateSensor en fonction de si on cherche du blanc ou du noir
}
else
{
// Do nothing : on est entre 70 et 270 on ne sait pas sur quel couleur on est on garde l'état précédent
}
}
}
/****************Fonction computeInput**********************/////
int8_t computeInput() {
int8_t result=0;
readState(); // appel de la fonction readState
for (int8_t i=0; i <5; i++ )
{
result = result +(i-2)*stateSensor[i];
}
return result;
}
// focntion principale
void loop() {
int8_t essai = 0;
essai = computeInput();
}
Posté par
sur 03 août 2016 - 09:02
dans
Robots roulants, chars à chenilles et autres machines sur roues
Merci Mike pour ton retour, alors je vais essayer de répondre point par point :
....
Si je comprend bien ,il fraudra que par exemple mes capteurs qui sont à droite prenne une valeur négative et à droite une valeur positive.
La somme de mes valeurs m'indique la tendance de la courbe , c'est bien cela?
....
.
!
Posté par
sur 08 août 2016 - 08:59
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 25 mai 2019 - 06:35
dans
Conseils et aide aux débutants, livres et kits en robotique
Posté par
sur 24 mai 2019 - 12:05
dans
Conseils et aide aux débutants, livres et kits en robotique
Posté par
sur 29 mai 2019 - 08:59
dans
Et si vous vous présentiez?
Posté par
sur 10 mai 2019 - 08:39
dans
Demandes d'informations sur les produits de la boutique
Posté par
sur 04 juillet 2019 - 01:31
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 26 juin 2019 - 08:20
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 03 mai 2019 - 12:04
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 02 mai 2019 - 10:15
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 06 mai 2019 - 04:43
dans
Projets collaboratifs
Posté par
sur 04 juillet 2019 - 01:37
dans
Impression 3D et Imprimantes 3D
Posté par
sur 10 avril 2019 - 06:47
dans
Robots roulants, chars à chenilles et autres machines sur roues
.[OK] / [ à faire ] / [ en cours ] / [ pour plus tard]
- Contrôle des Nema 17
- Prise en main du GY-271
- Montage du chassis , moteurs et roues
- Prise en main du module GPS
- Coder le suivi d'un cap
- Intégrer l'électronique
- Etablir une liste de coordonnées GPS
- Mettre en place un système de détection/évitement d'obstacles
- Mettre en place 2 ou 3 capteurs
- Mettre en place un éclairage (pour le debug à distance ..et le fun)
- Retour d'info via ondes radios ???
- Intégration d'un Rpi + Caméra
- Habillage en impression 3D
- Améliorer/Augmenter la garde au sol

Posté par
sur 08 mai 2019 - 11:10
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je suis faible ..j'ai commandé l'Ender 3 , elle arrive en fin de semaine !
Donc j'ai commencé à modeliser quelques pièces ..
* Un parechoc avec 2 capteurs ultrason HC-SR04 et un capteur PIR
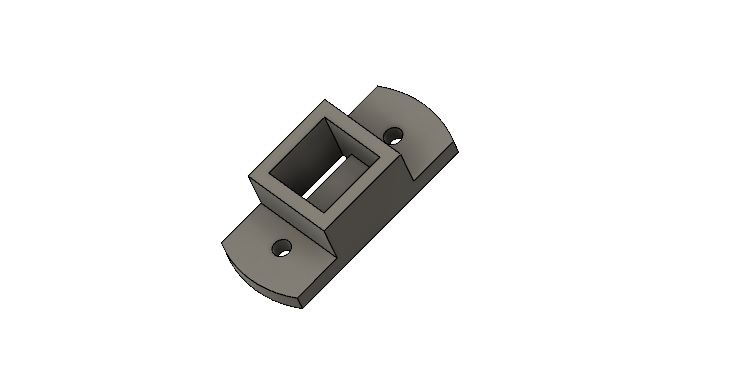
* Un support latéral pour 1 capteur HC-SR04 : un par côté
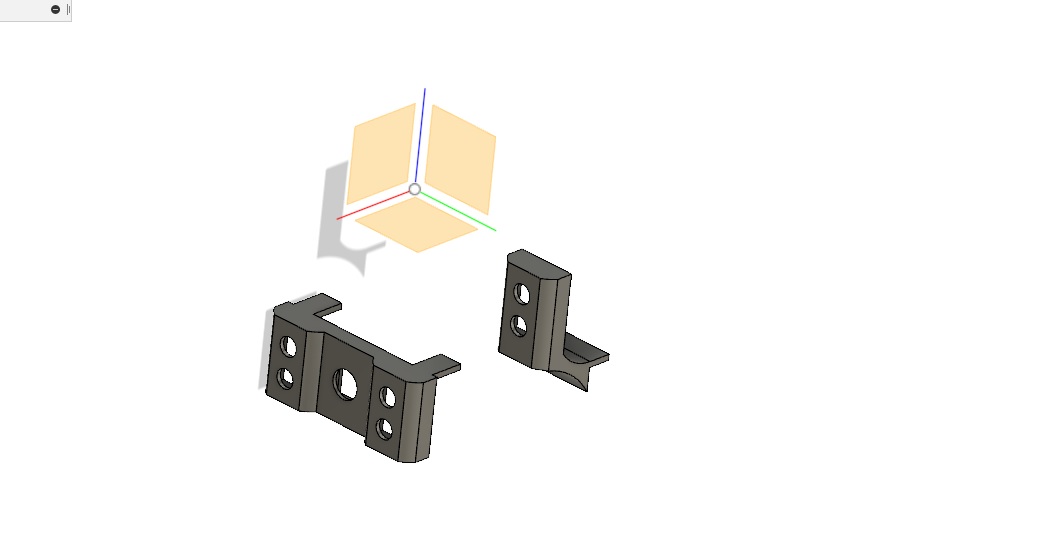
* Un support pour mes LED RGB. Elles me serviront de "statut/debug" , une par capteur ultrason .
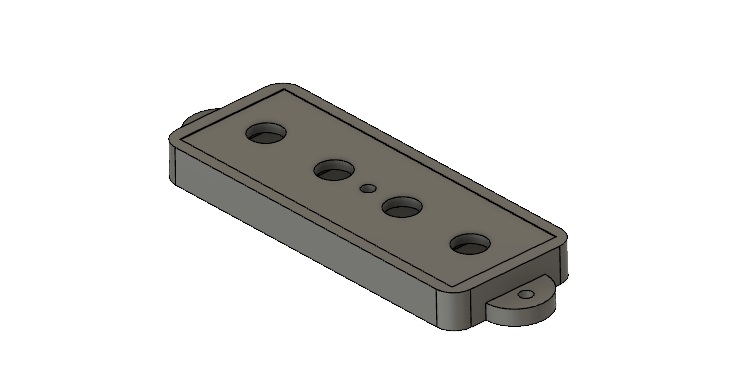
* Et plus anedoctique , un support pour le compas numérique .
Je prévois de monter ces 2 dernières pièces sur le couvercle de ma boite de dérivation qui me sert de "box" principale
J'attends toujours mes nouvelles roues qui doivent arriver elles aussi en fin de semaine ...
Posté par
sur 05 mai 2019 - 07:17
dans
Robots roulants, chars à chenilles et autres machines sur roues
Merci !
Je "pratique" l'Arduino depuis 6 ou 7 ans plus ou moins régulièrement . Je n'ai jamais fait de projets "mécaniques" à proprement parler mais j'ai fait pas mal de projets de suivi/régulation : la serre de mon jardin , le caisson de mon imprimante 3D , un mini datalogger pour ma moto et une couveuse pour oeufs dernièrement , et un peu de "domotique" , plus 2 ou 3 autres bricoles que j'oublie .
Je bosse dans le domaine des systèmes embarqués pour de l'instrumentation/métrologie en industrie donc ça m'aide beaucoup .
J'espère que je réussirais à rendre ce robot le plus autonome et abouti possible . Il y a des domaines où je me débrouille mais d'autres que je connais pas du tout ou trés mal comme la mécanique "théorique" ou le côté Internet/Serveur niveau programmation .
Et le gros morceau dernièrement que j'ai abordé c'est la modélisation puis la conception de pièces imprimées 3D : c'est chronophage mais tellement utile quand on bricole/bidouille ^^ !
Posté par
sur 13 avril 2019 - 09:49
dans
Robots roulants, chars à chenilles et autres machines sur roues
Salut !
Pour répondre à vos questions : le but de la patrouille sur mon terrain est de faire de la dissuasion pour certains nuisibles à 4 pattes et à fourrure qui viennent s'attaquer
au poulailler de Mme ...bref je me trouve des excuses pour faire un robot ^^ !
La garde au sol est effectivement à revoir (1 à 2 cm) : je pense partir sur des roues plus grandes ..à voir.
Mon terrain est composé d'un peu de tout : gravier, terre , herbe voir le tout mélangé !
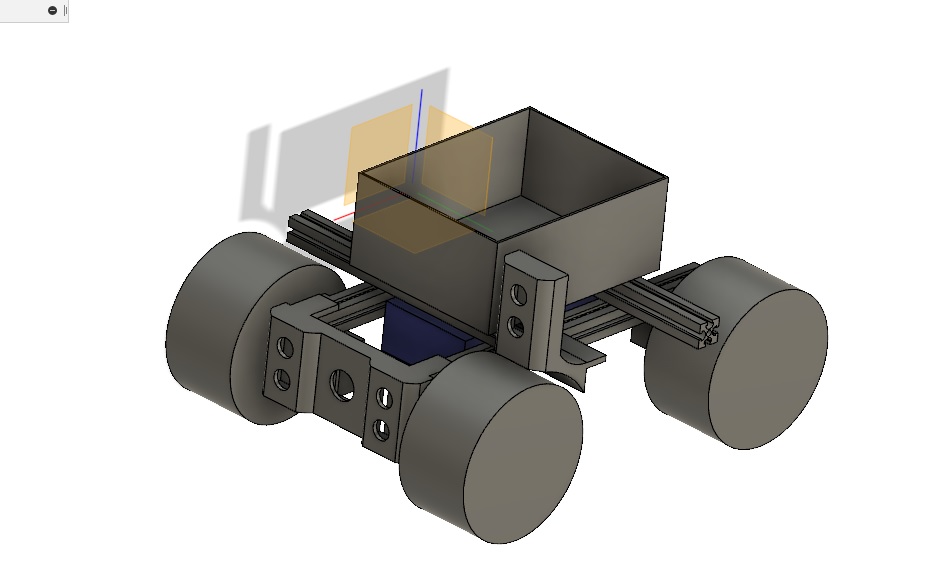
Les profils alu sont des 20x20 modèle T slot en 300mm .
J'en ai eu 5 pour 20€ sur Ebay .
C'était un kit pour faire une CNC je crois
J'ai reçu de quoi fixer les 2 derniers PàP . Je dois récupérer des vis pour fixer les roues.
J'attends de recevoir ma batterie et on va commencer à faire bouger tout ça !
Posté par
sur 08 juin 2019 - 04:25
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je connais bien cette batterie, elle m'a lachée après 5 charges
Posté par
sur 05 mai 2019 - 03:44
dans
Robots roulants, chars à chenilles et autres machines sur roues
J'ai remplacé le couple servo/HC-SR04 par 4 HC-SR04 fixes .
Ils sont gérés par une ProMini qui communique avec la Mega/Ramps1.4 via un port série virtuel.
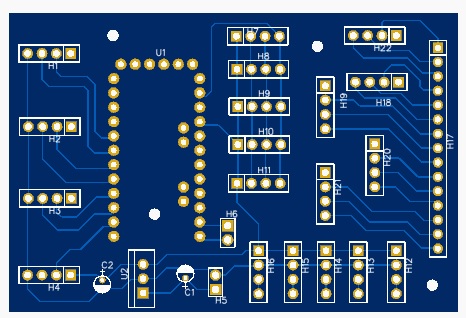
Afin d'optimiser le câblage, j'ai dessiné un PCB où il y aura :
- la Pro Mini 5V
- les 4 HC-SR04
- des slots pour des modules I2C (extension de la Ramps 1.4)
- des slots pour des composants analogiques/numériques divers (extension de la Ramps 1.4)
- des slots pour des leds RGB (extension de la Ramps 1.4)
- du 5V
- un connecteur pour relier les 2 cartes (Tx/Rx)
Je repousse l'achat de l'Ender3 mais ma CR10 commence à me manquer ..j'aurais bientôt quelques pièces à modéliser/imprimer.
Posté par
sur 20 avril 2019 - 11:10
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 15 mai 2019 - 06:27
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Et concrètement il va servir à quoi Marcel ? une sorte de "Google home"-like ?





