Ya pleins d'éléments pour les assembler ou y fixer des moteurs ou autres poulies ..
Tu as différentes longueurs et tailles ..
Et sur Ebay ca vaut 3 fois rien

Il y a 43 élément(s) pour N1oN4o (recherche limitée depuis 04-mai 13)
 Posté par
sur 25 avril 2019 - 06:37
dans
Conseils et aide aux débutants, livres et kits en robotique
Posté par
sur 25 avril 2019 - 06:37
dans
Conseils et aide aux débutants, livres et kits en robotique
Posté par
sur 04 août 2016 - 08:04
dans
Robots roulants, chars à chenilles et autres machines sur roues
Donc si ton "result" est négatif , la ligne noire est à gauche , si c'est égal à zéro , elle est au milieu , si c'est positif elle est à droite !
(Sous réserve que ton Sensor[0] soit à l'extrême gauche , le Sensor[1] est à gauche , le Sensor[2] est au milieu , le Sensor[3] à droite , et pour finir le Sensor[4] tout à droite  )
)
Bon courage pour la suite !
Posté par
sur 04 août 2016 - 08:33
dans
Robots roulants, chars à chenilles et autres machines sur roues
result = result +(i-2)*stateSensor[i]*facteurSensor[i];Et normalement ça devrait marcher
!
Posté par
sur 06 août 2016 - 08:26
dans
Robots roulants, chars à chenilles et autres machines sur roues
!
Posté par
sur 07 août 2016 - 07:23
dans
Robots roulants, chars à chenilles et autres machines sur roues
Voila ce que je ferais , si j'ai bien compris ton besoin ..
#define SEUILMINNOIR 270
#define SEUILMAXBLANC 70
uint8_t stateSensor[5];
int value;
void setup()
{
}
/****************Fonction readState**********************/////
void readState() {
for (uint8_t i=1; i<6; i++) // i de 1 à 5 pour les capteurs de 1 à 5 capteur 1 mis sur A1 capteur 5 sur A5
{
value = analogRead(i);
if ( value> SEUILMINNOIR ) // dans ce cas on est sur du noir
{
stateSensor[i-1]=1; // i-1 car on commence un tableau à l'index 0 ... et ici i entre 1 et 5
}
else if ( value<SEUILMAXBLANC ) // dans ce cas on est sur du blanc
{
stateSensor[i-1]=0; // à voir si il faut échanger 0 et 1 entre les deux lignes stateSensor en fonction de si on cherche du blanc ou du noir
}
else
{
// Do nothing : on est entre 70 et 270 on ne sait pas sur quel couleur on est on garde l'état précédent
}
}
}
/****************Fonction computeInput**********************/////
int8_t computeInput() {
int8_t result=0;
readState(); // appel de la fonction readState
for (int8_t i=0; i <5; i++ )
{
result = result +(i-2)*stateSensor[i];
}
return result;
}
// focntion principale
void loop() {
int8_t essai = 0;
essai = computeInput();
}
Posté par
sur 03 août 2016 - 09:02
dans
Robots roulants, chars à chenilles et autres machines sur roues
Merci Mike pour ton retour, alors je vais essayer de répondre point par point :
....
Si je comprend bien ,il fraudra que par exemple mes capteurs qui sont à droite prenne une valeur négative et à droite une valeur positive.
La somme de mes valeurs m'indique la tendance de la courbe , c'est bien cela?
....
.
!
Posté par
sur 08 août 2016 - 08:59
dans
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ...
Posté par
sur 25 mai 2019 - 06:35
dans
Conseils et aide aux débutants, livres et kits en robotique
Posté par
sur 24 mai 2019 - 12:05
dans
Conseils et aide aux débutants, livres et kits en robotique
Posté par
sur 29 mai 2019 - 08:59
dans
Et si vous vous présentiez?
Posté par
sur 10 mai 2019 - 08:39
dans
Demandes d'informations sur les produits de la boutique
Posté par
sur 04 juillet 2019 - 01:31
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 26 juin 2019 - 08:20
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 03 mai 2019 - 12:04
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 02 mai 2019 - 10:15
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 06 mai 2019 - 04:43
dans
Projets collaboratifs
Posté par
sur 04 juillet 2019 - 01:37
dans
Impression 3D et Imprimantes 3D
Posté par
sur 18 avril 2019 - 06:28
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je me suis fait une petite esquisse 3D sous Fusion 360 - je suis novice - :
Ca va me permettre de mieux dimensionner mes futures pièces que j'imprimerais en 3D .
J'ai "modélisé" les nouvelles roues .

Posté par
sur 17 mai 2019 - 12:33
dans
Robots roulants, chars à chenilles et autres machines sur roues
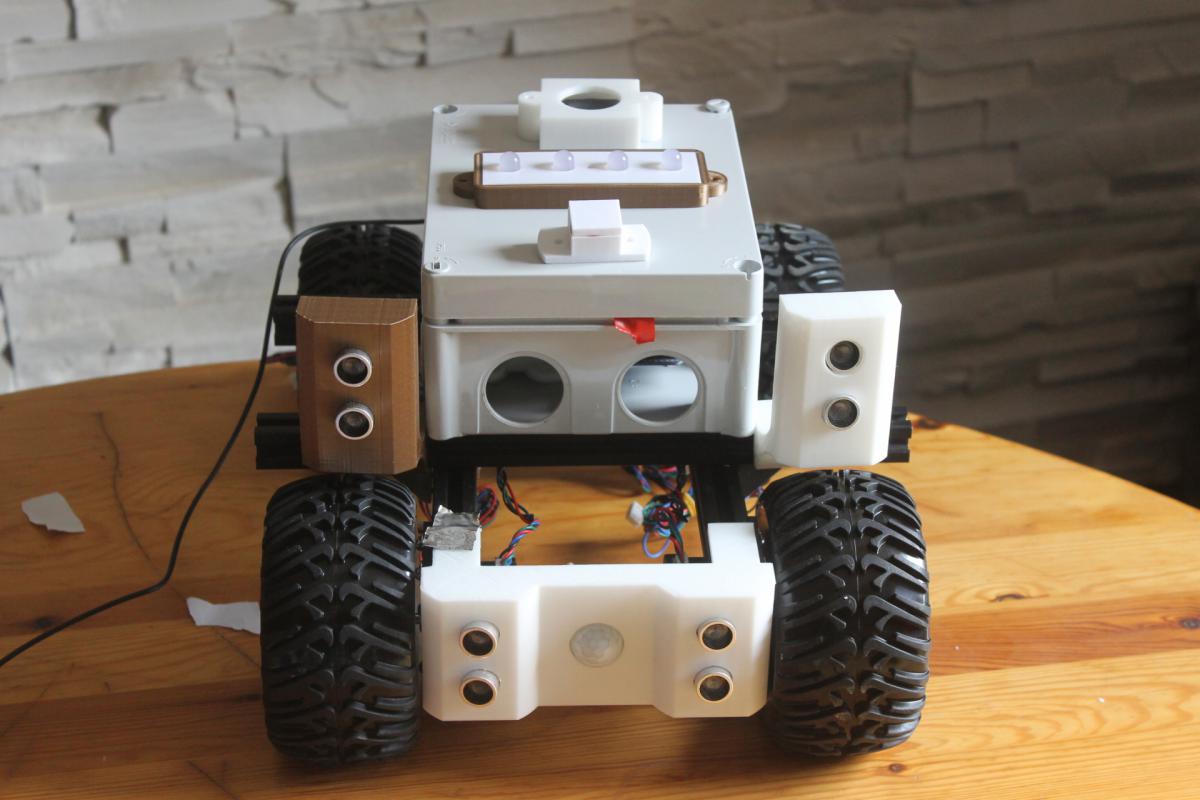
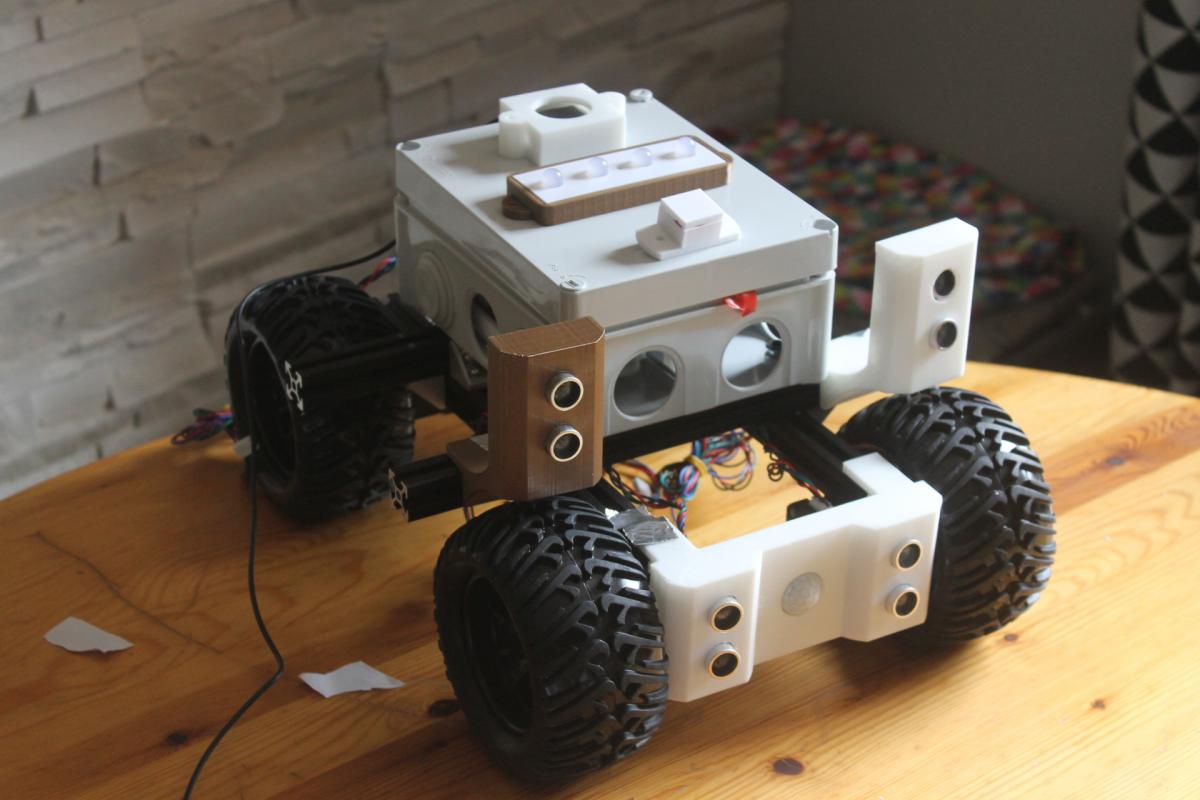
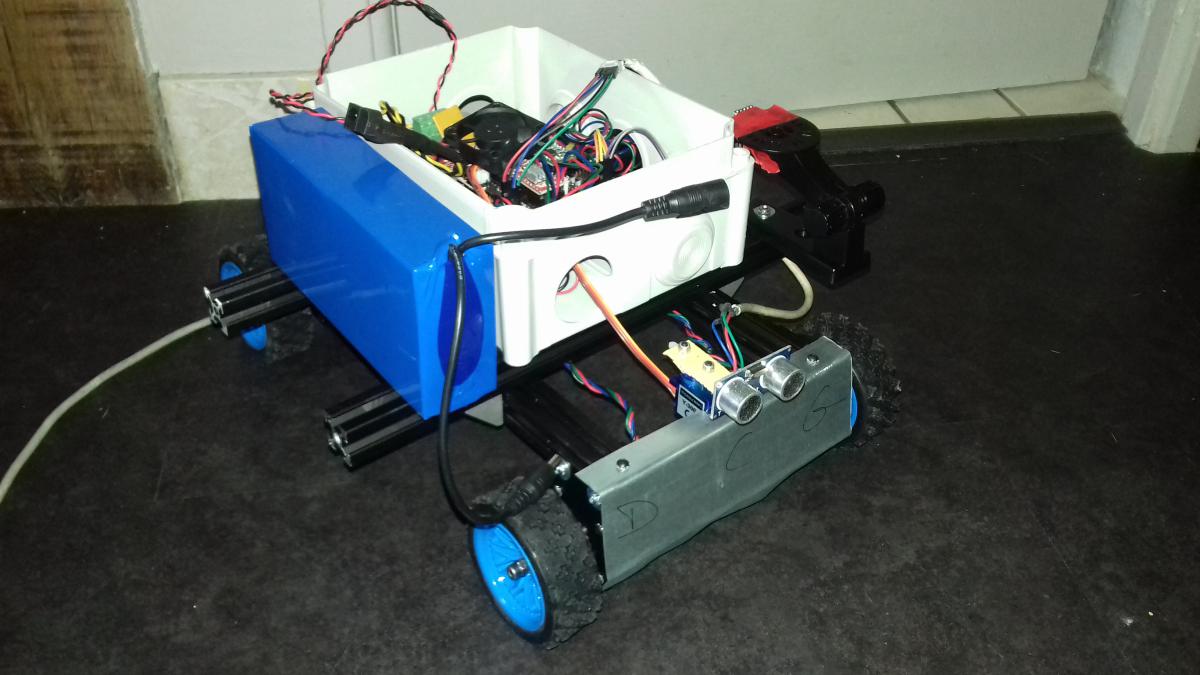
Les impressions avancent bien !
Il y a donc :
- les 2 supports latéraux avec chacun un capteur ultrason
- le bumper avant avec 2 capteurs ultrason et un capteur PIR
- le bloc de LEDs
- le support pour le compas numérique
- le cache pour l'antenne GPS
- la 1ère fixation de ma batterie
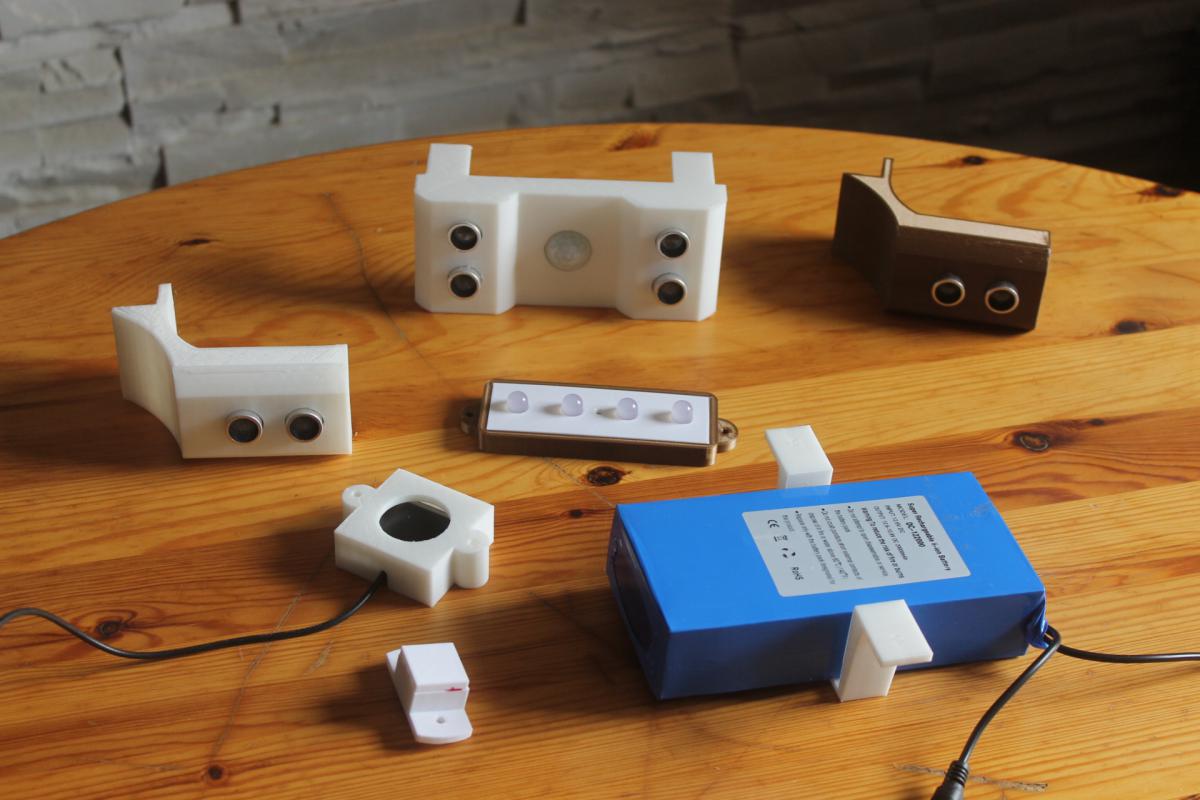
Mis à blanc (scotchés pour être plus exact^^) , aucun des composants n'est fixé pour l'instant !
Ma carte électronique est arrivé. J'ai commencé à assembler les composants. J'ai été un peu radin niveau espacement des connecteurs
mais ça ira .
(avec son support)
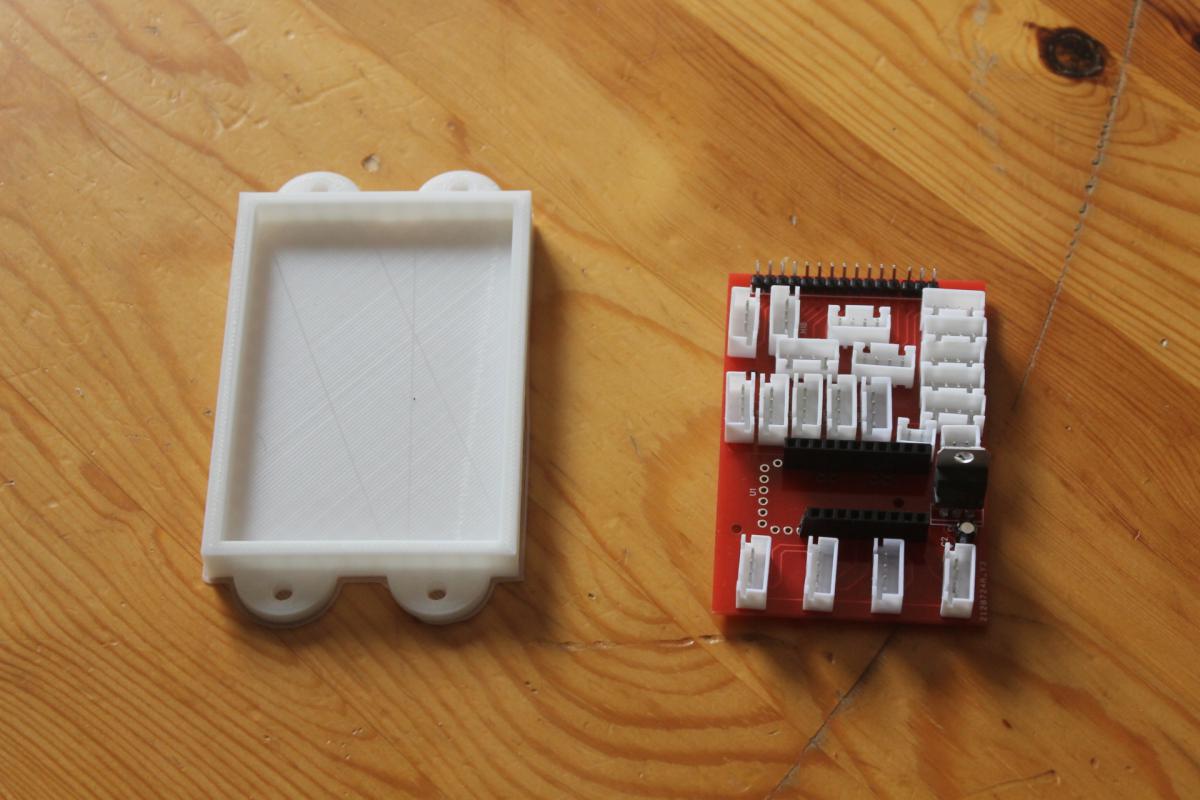
et dans la boite de dérivation :
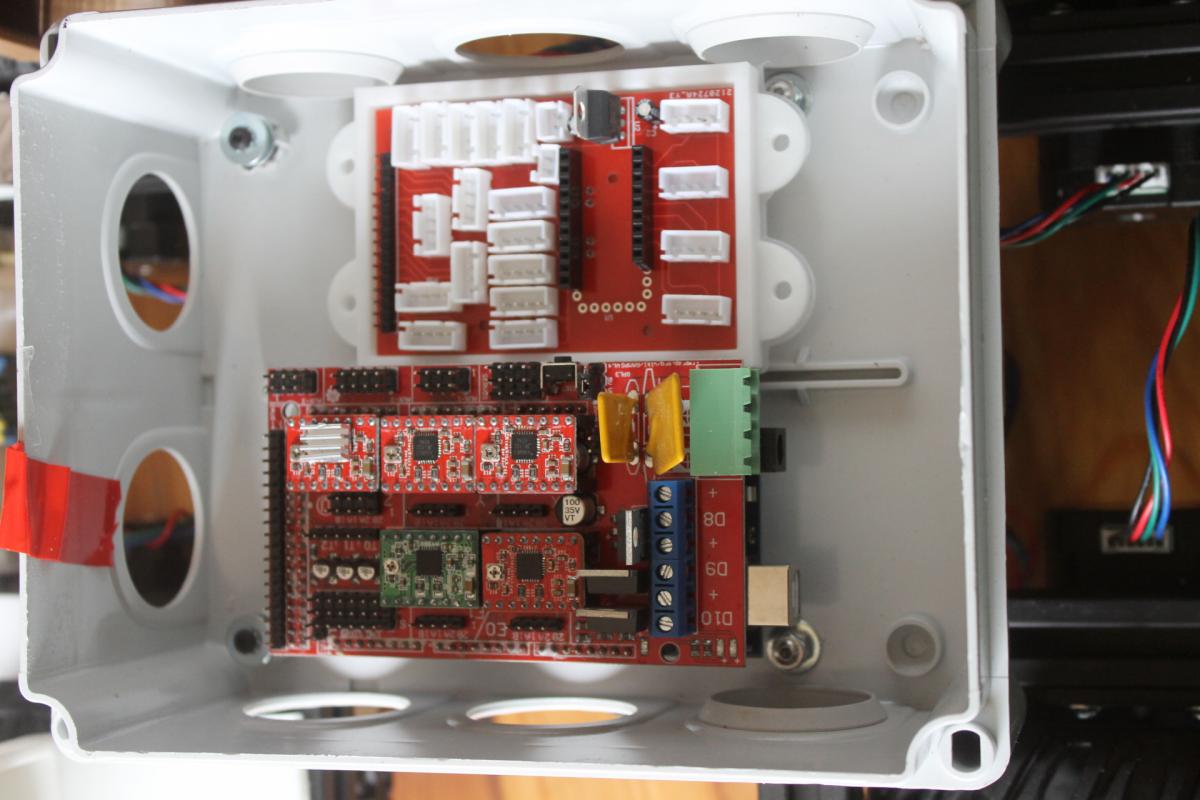
J'ai encore quelques bricoles à modéliser/imprimer et il me manque des "mini-vis" pour fixer mes modules Arduino.
Posté par
sur 17 mai 2019 - 05:07
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 27 avril 2019 - 08:02
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 08 juin 2019 - 04:25
dans
Robots roulants, chars à chenilles et autres machines sur roues
Je connais bien cette batterie, elle m'a lachée après 5 charges
Posté par
sur 05 mai 2019 - 03:44
dans
Robots roulants, chars à chenilles et autres machines sur roues
J'ai remplacé le couple servo/HC-SR04 par 4 HC-SR04 fixes .
Ils sont gérés par une ProMini qui communique avec la Mega/Ramps1.4 via un port série virtuel.
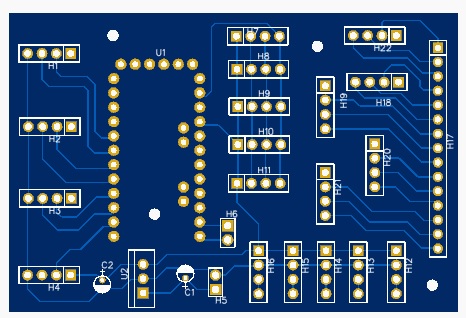
Afin d'optimiser le câblage, j'ai dessiné un PCB où il y aura :
- la Pro Mini 5V
- les 4 HC-SR04
- des slots pour des modules I2C (extension de la Ramps 1.4)
- des slots pour des composants analogiques/numériques divers (extension de la Ramps 1.4)
- des slots pour des leds RGB (extension de la Ramps 1.4)
- du 5V
- un connecteur pour relier les 2 cartes (Tx/Rx)
Je repousse l'achat de l'Ender3 mais ma CR10 commence à me manquer ..j'aurais bientôt quelques pièces à modéliser/imprimer.
Posté par
sur 20 avril 2019 - 11:10
dans
Robots roulants, chars à chenilles et autres machines sur roues
Posté par
sur 15 mai 2019 - 06:27
dans
Bras robots, pinces, tourelles, et autres manipulateurs
Et concrètement il va servir à quoi Marcel ? une sorte de "Google home"-like ?





