Tu nous feras un blog avec l'équivalent de ce que j'aurais fait pour briel avec la carte maestro ! 

Glenn Robot Humanoide
Débuté par Oliver17, juil. 05 2016 06:11
994 réponses à ce sujet
#781

Mike118
-

- Administrateur
-

- 10â¯081 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 04 juin 2018 - 10:38
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!

#784
levend
-

- Membres
-
- 5â¯621 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 10 juin 2018 - 04:35
Il faudra peut-être penser à lui faire des pieds pour qu'il soit plus stable  .
.
J'adore toujours ton design, tu devrais encore en faire ton métier...
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#785
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 10 juin 2018 - 04:48
Ben pour l'instant il manque comme tu as pu le constater, les avant bras, les mains, les mollets et pieds, mais le truc, c'est qu'il va falloir que je trouve une solution à savoir quoi choisir comme moteur pour qu'il tienne debout et aussi les capteurs de pesage au niveau des pieds, (et voir aussi au bout des doigts ajouter des capteurs) je ferai un post dans la semaine je pense pour avoir l'avis des membres car j'ai vu qu'il existait plusieurs sortes de capteur à 50 Kg (ce sont les moins cher apparemment), et la question que je me pose c'est comme les fixer sans nécessairement les percer.
Enfin bon, j'ai plusieurs questions je posterai
Sinon en faire mon métier, mouais j'ai fais ça 10 ans dans le game pour des indépendants, comme je l'avais déjà dis je n'y prenais plus de plaisir.
Mais là c'est pas pareil, c'est pour moi et je vais pouvoir l'imprimer ^^
#786
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 19 juin 2018 - 01:13
Plop les Maker's, actuellement j'essaye d'apprendre les Timers() ^^ chose que l'on m'a conseillé de faire pour éviter d'utiliser trop de while ^^
J'ai donc trouvé ça sur le net, j'espère pouvoir comprendre, si vous avez des tutos ou autres pour apprendre je suis preneur, merci
http://www.locoduino.org/spip.php?article84
Edit : ouais ben en fait, ça me fatigue...
#787
Oracid
-

- Modérateur
-
- 6â¯932 messages
Pilier du forum
- Gender:Male
Posté 25 juin 2018 - 08:01
Il y a ça, http://www.robot-maker.com/forum/topic/11855-arduino-les-interruptions/, si cela peut t'aider.si vous avez des tutos ou autres pour apprendre je suis preneur, merci
Sinon, très classe, ta modélisation, comme d'habitude.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#788
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 25 juin 2018 - 08:11
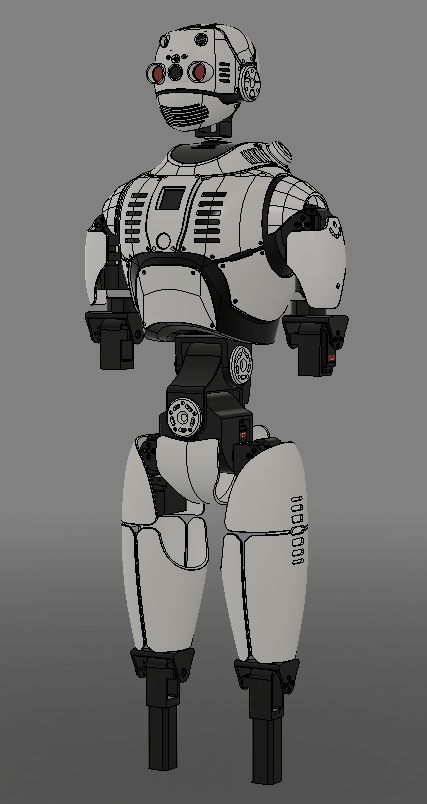
Merci pour le lien, je vais tester la solution de Mike sur http://www.robot-maker.com/forum/topic/12190-gestion-de-vitesse-sans-while-avec-millis/et merci pour les screens, tiens si tu aimes bien :
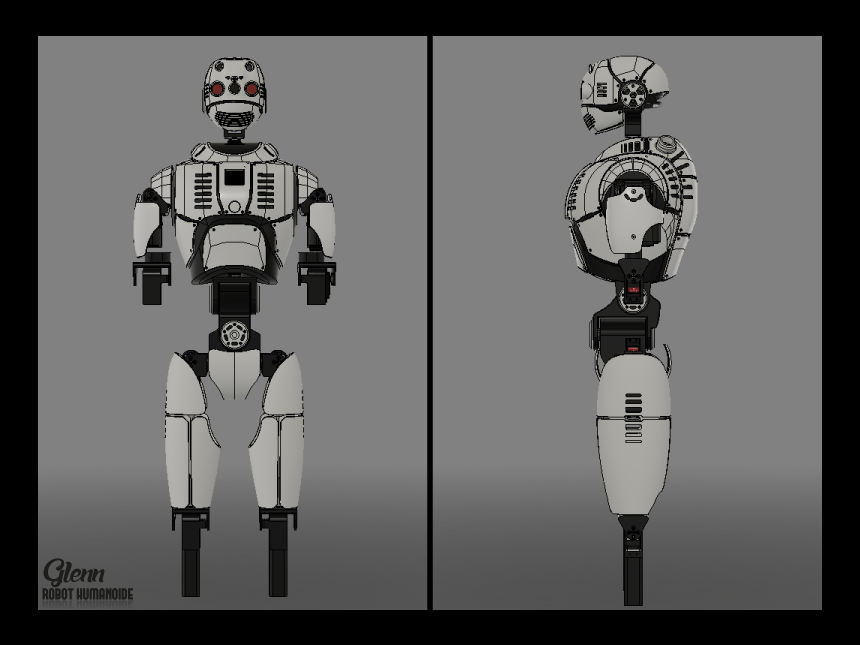

...et j'ai encore fais des modifs sur le capots arrière en bas pour le passage de câbles.
Mais on ne les voient pas sur ces sceens.
- Oracid aime ceci
#789
Budet
-

- Membres
-
- 366 messages
Habitué
- Gender:Male
- Location:69
Posté 01 juillet 2018 - 06:47
Si tu veux mon humble avis, tu devrais quand même passer par quelques phases d'essai/test avant de t'embêter à fournir une modélisation aussi poussée.
C'est pas que je doute en tes capacité mais d'expérience il est quasiment impossible que tout ce que tu es prévu théoriquement fonctionne du premier coup. Tu vas forcément devoir apporter des modifications à ton design et je trouve ça dommage que tu dépenses du temps et de l'argent (à fabriquer quelque chose d'aussi poussé) alors qu'autant tu vas devoir tout revoir parce que ta batterie sera trop encombrante ou autre.
C'est pour cela que dans un process normal de conception on passe par des proto, des version V1, V2, V3 etc... On test d'abord les fonctions et le design vient en dernier.
Sinon rien à redire sur ta modélisation, c'est du bon boulot
#790
gerardosamara
-

- Membres
-
- 374 messages
Habitué
- Gender:Male
- Location:Costa Rica & Bretagne
- Interests:La vie sous les tropiques
Posté 02 juillet 2018 - 03:31
+1 @Oliver17
Oui if faut vraiment faire un test en réel pour le "proof of concept"
Oui if faut vraiment faire un test en réel pour le "proof of concept"
Pura vida
Ma chaine youtube https://www.youtube....EQ5MTR3A/videos
Tutoriel MIT Inventor2 https://www.robot-ma...e-robot-mobile/
#791
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 02 juillet 2018 - 07:15
Pour tous ce qui est matos dans Glenn justement j’achète en conséquence et je modéliser autour " " , pour tout ce qui est articulations je fais des tests direct de mouvement sous fusion pour voir si ça passe, en prenant en compte bien sur le passage des cables (saloperie), pour les batteries car je pense en mettre plusieurs elles vont être logé dans les cuisses et c'est pour ça qu'il n'y a rien de modéliser du cuissot au genou (mise à part des capots) car je n'ai aucune idée du format d'une batterie, et surtout celles qui vont allez à cet endroit.
J'ai aussi les capteurs de pesage pour les pieds et au niveau des doigts mettre des capteurs de pression, ça me plait bien ça aussi
Il reste pas mal de chose niveau modélisation, j'ai un driver de servo à placer au niveau du bassin pour contrôler les jambes et la colonne.
En bref il reste pas mal de chose à modéliser
Pour l'impression je ne ferai que ce qui me semble sur " " que je puisse imprimer, vu le nombre d'heures qu'il faut vais pas m'amuser non plus à imprimer dix fois la même pièces lol
Puis j'ai franchement envie d'imprimer, et je suis parfaitement conscient qu'il faudra revoir certaines choses, mais j'en envie d'un peu de concret sans pour autant tout faire niveau impression.
Pour l'instant niveau programmation j'avance ddoouuuuucccceeemmmmeennnnttt j'apprend en même temps, mais j'ai de bons profs et conseils, faut juste que je prenne le temps de bien piger, et ouais j'ai le cerf volant
Et là je suis sur l'upgrade de mon imprimante ^^
PS : j'ai commandé ce servomoteur pour tester un peu et en brushless, on va bien voir, mais il était moins cher lorsque je l'ai pris.
https://fr.aliexpres....40696c37YKylES
Merci ^^
#792
Oracid
-
- Modérateur
-
- 6â¯932 messages
Pilier du forum
- Gender:Male
Posté 02 juillet 2018 - 11:01
Super servo ! J'espère que tu nous feras un super retour.
Pour les dimensions, 40.5X20.5X36mm, tes servos actuels font combien ?
Pour les dimensions, 40.5X20.5X36mm, tes servos actuels font combien ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#793
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 02 juillet 2018 - 11:24
C'est une taille standard : 40.5X20.5X36.5mm
Les servos que j'utilise varient à peu de chose prés, c'est surtout aux fixations que ça joue souvent sur les mesures.
Sinon pour le retour mes tests vont être rapide, si il fait du bruit lorsqu'il tient ça position, et bien c'est pas bon, et hop je ne m'en sert plus ^^
On verra bien, j'espère que non ...
#794
Oracid
-
- Modérateur
-
- 6â¯932 messages
Pilier du forum
- Gender:Male
Posté 02 juillet 2018 - 01:09
Cela peut également venir de ton programme, de ton alim, et je ne sais quoi encore.Sinon pour le retour mes tests vont être rapide, si il fait du bruit lorsqu'il tient ça position, et bien c'est pas bon, et hop je ne m'en sert plus ^^
En faisant bouger un servo avec un potentiomètre, je me suis aperçu que certaines positions généraient des vibrations et d'autres, non.
J'en ai conclu que le potentiomètre n'était pas très bon, mais peut-être était-ce le servo.
Comment savoir ? En changeant le potentiomètre d'abord, peut-être.
En tout cas, je te conseille de d'abord tester le servo avec un testeur de servo.
Puis de faire ça avec une Arduino et un potentiomètre, puis dans le cadre de ton projet.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#795
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 02 juillet 2018 - 01:38
Je n'ai pas de testeur de servo, par contre j'ai deux références de servo qui ne font quasi voir pas de bruit du tout en tenant leurs position, donc après est ce grâce à l'électronique, au moteur, au potentiomètre, la franchement j'en sais rien, j'ai fais le test en prenant un servo en dessous de la taille du standard, mais avec les mêmes références, et bim, lui il fait du bruit, donc pour savoir aucune idée.
#796
Forthman
-

- Membres
-
- 1â¯447 messages
Membre chevronné
- Gender:Not Telling
- Location:Montauban (82)
Posté 03 juillet 2018 - 05:42
le bruit d'un servo lors du maintien peut également provenir de la trame.
Et pour info, un servo alimenté qui ne reçoit plus de trame conserve sa position.
Dans un montage que j'avais fait, et qui me faisait du bruit en maintien, j'ai modifié le code pour n'envoyer cette foutue trame "que si un mouvement était demandé"
ça remonte un peu donc je ne me rappelle plus avec quel moteur j'avais fait ça.
Par contre, il faut envoyer quelques trames (3 ou 4 de mémoire) pour que le moteur prenne en compte la nouvelle position
#797
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
#798
Forthman
-
- Membres
-
- 1â¯447 messages
Membre chevronné
- Gender:Not Telling
- Location:Montauban (82)
Posté 03 juillet 2018 - 08:05
C'est moi qui suis désolé, je me suis mal exprimé.
Ce n'est pas la trame en elle-même qui pose problème, mais l'électronique embarquée dans le servo
(peut-être une trop grande sensibilité, ou un potentiomètre de mauvaise qualité)
J'indiquais juste une solution que j'avais trouvé à l'époque (aussi parce que je ne savais pas que certains servos fonctionnaient mieux que d'autres  )
)
#799
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn

#800
cocothebo
-

- Membres
-
- 341 messages
Habitué
- Gender:Male
Posté 03 juillet 2018 - 08:46
Oui il y a au moins une carac qui est parfois donnée sur les datasheets de servo c'est la "dead band width", bande morte on va dire en français, qui donne le changement minimum dans l'ordre donné pour que le servo bouge, par exemple avec une bande morte de 6µs, un changement dans l'ordre de +/-3µs commencera à faire bouger le servo.
Pour rappel, le servo de modélisme a une commande analogique avec des trames qui suivant la longueur de l'état haut donne la position désirée (d'environ 1ms pour le minimum et 2ms pour le max, après ça dépend aussi du servo), cette impulsion étant envoyée 50 fois par seconde.
C'est pourquoi on a besoin de cette bande morte (ou hysteresis), comme ça si la longueur de l'impulsion change de moins de +/- la bande morte divisée par deux, le servo considère que c'est du "bruit".
Si on contrôle avec un arduino par exemple en utilisant les timers, il se peut qu'avec la précision, même en voulant faire des impulsions de 1.5ms, on ait en vrai des impulsions de 1.51ms ou 1.49ms, sans cette bande morte, le servo moteur essayerai de corriger sa position 50 fois par seconde
=> ca consomme et ca fait du bruit.
Et cette bande morte affecte par contre aussi le jeu "électronique" du servo, si l'angle du palonier change dans dans cette bande morte, la position ne sera pas corrigée.
Si on reprend l'exemple d'avant, un servo moteur ayant une course 180° entre 1ms et 2ms aura donc une précision de 0,18° par µs, avec une bande morte de 6µs, le jeu permis par l'électronique sera de +/- 0,54°.
=> le servo ne réactualisera sa position qu'après un changement d'environ max 1° dans sa position.
Si on revient à ce que disait Forthman, avec un servo moteur ayant une faible bande morte et un générateur de signal (de contrôle) du servo de faible qualité (qui a bcp d'imprecision), le servo risque de bouger en permanence même si on ne le veut pas.
Dans ce cas deux solutions:
- comme Forthman, on évite d'envoyer trop de trames (si le servo garde sa consigne), donc le signal ne sera plus de période 20ms
- on choisi un servo avec une bande morte plus importante pour filtrer ce bruit, en contre partie d'un jeu électronique plus important.
Après il faut aussi voir la qualité de la commande, pe que la carte maestro (je crois que tu utilises celle la dans Glenn) à un bruit très petit et donc autant chosir dans ce cas un servo avec une bande morte petite, il maintiendra mieux la position demandée.
Ben sur tout ça ne changera pas le bruit fait par la mécanique du servo qui est plus ou moins prononcé en fonction de celui ci. Ca permet juste d'éviter de le faire bouger quand ce n'est pas nécessaire et donc de réduire indirectement le temps ou il fait du bruit.






1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




