Pour être clair sur ce que je disais : le choix d'un langage ou l'autre dépend de la facilité d'implémentation d'une fonctionnalité. Si python offre une lib de communication super simple, ça peut valoir le coup de réflechir à l'utliser.
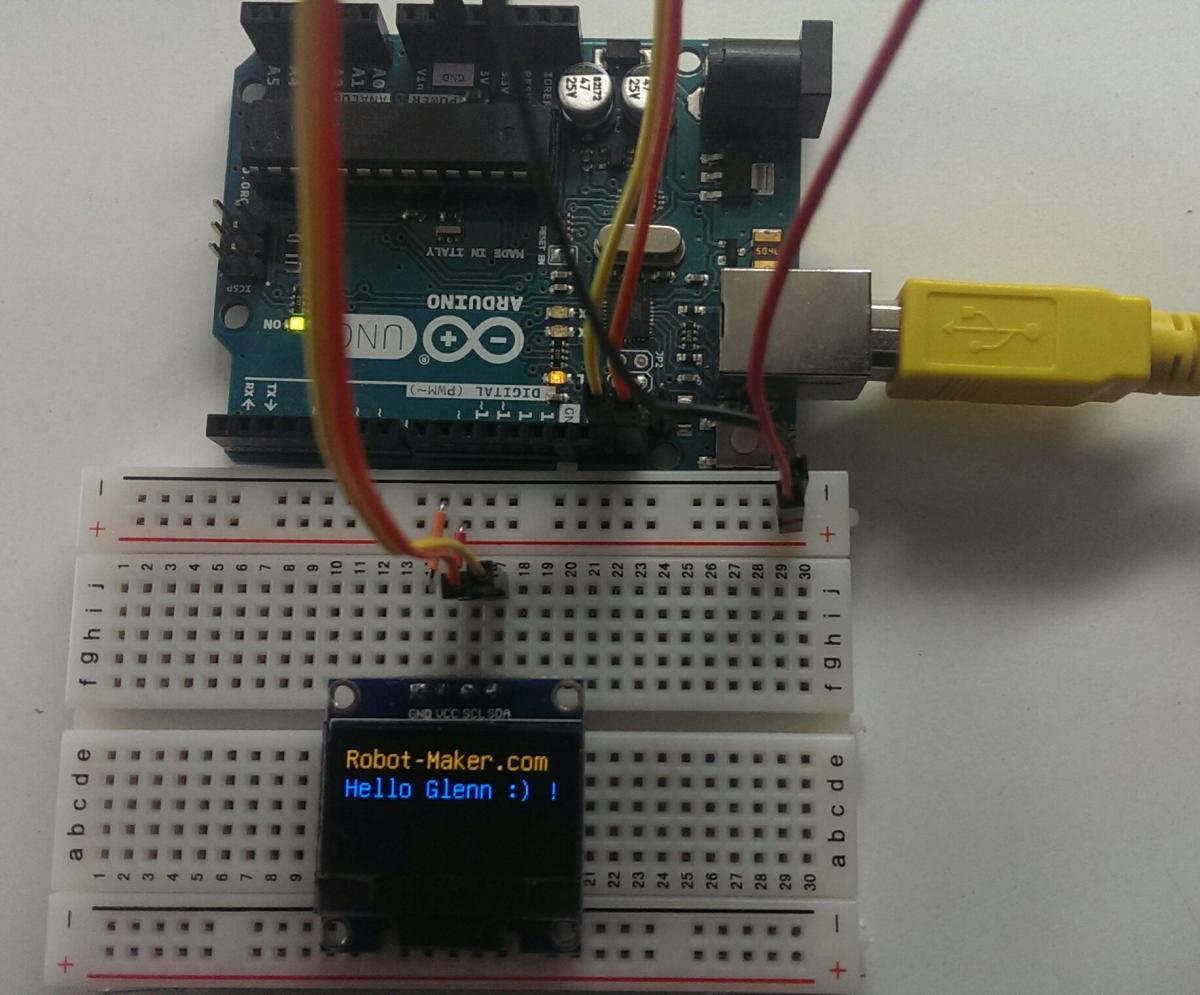
Mais dans ton cas, si tu veux rester avec C++, et surtout pour une fonctionnalité aussi basique que la communication série, pas besoin de python. Je passerai personnellement par l'USB, ce lien (https://www.monocili...sing-usb-and-c/) semble contenir toute l'info nécessaire.
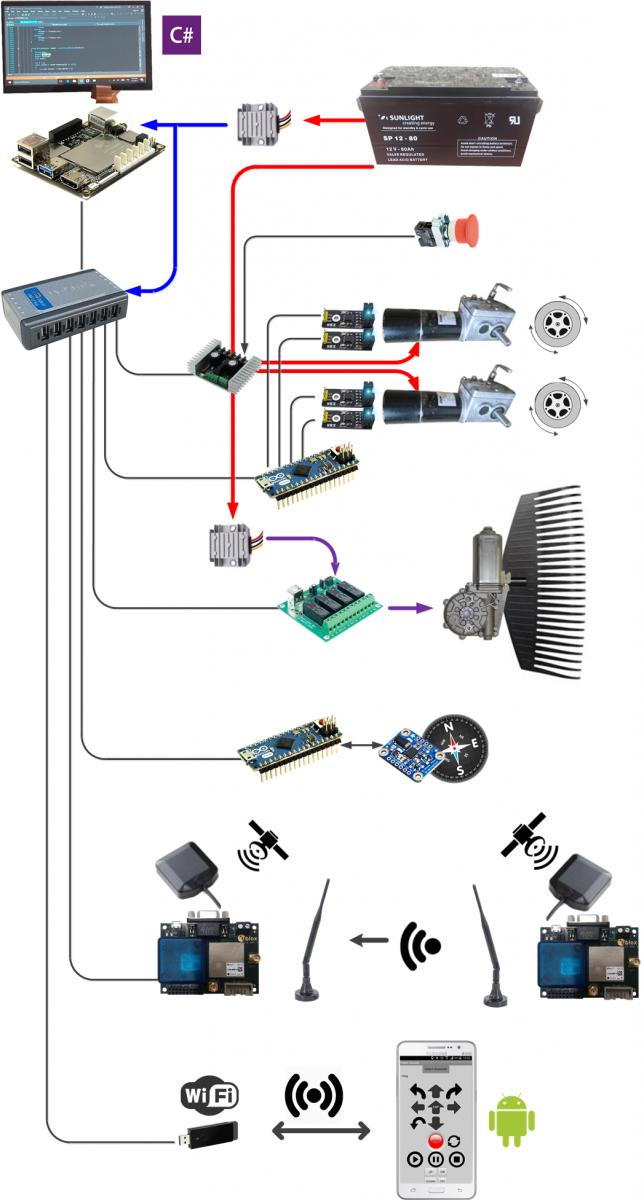
Après, je ne suis pas très au point sur les protocoles de communication, donc c'est ce qui me semble le plus simple. La solution est facile à mettre en place: il faut juste un câble USB. À toi ensuite de définir quelles infos doivent transiter. Il est probablement judicieux de faire des calculs de base sur l'arduino pour simplifier le code côté raspberry (e.g. aggréger toutes les mesures de capteurs à un temps t donné et tout renvoyer à une fréquence paramétrable vers le Pi, faire les boucles d'asserv les plus basique sur l'arduino directement).
J'ai pas le temps de tester en pratique avant ce week-end je pense, mais je peux essayer ce lien (comm USB) d'ici dimanche.