tiens, ton robot a échangé sa bouille sympathique contre une qui laisse présager un destin funeste pour l'humanité 

Glenn Robot Humanoide
Débuté par Oliver17, juil. 05 2016 06:11
994 réponses à ce sujet
#901

Forthman
-

- Membres
-

- 1â¯493 messages
Membre chevronné
- Gender:Not Telling
- Location:Montauban (82)
Posté 01 mai 2019 - 10:12





#906
N1oN4o
-

- Membres
- 45 messages
Nouveau membre
- Gender:Male
Posté 03 mai 2019 - 12:10
J'en utilise 4 pour mon robot-patrouilleur . C'est un grand classique ..
Tu as trouvé où la donnée concernant l'angle de vision ?
En regardant ton dessin et par rapport à ce que j'ai expérimenté , je pense que ca détecte sur une bande plus large ..
Tu as trouvé où la donnée concernant l'angle de vision ?
En regardant ton dessin et par rapport à ce que j'ai expérimenté , je pense que ca détecte sur une bande plus large ..
#908
R1D1
-

- Modérateur
-
- 1â¯212 messages
Modérateur et Membre passionné
- Gender:Male
- Location:Autriche
Posté 08 mai 2019 - 02:32
Salut les Maker's, je me posais la question de savoir si le HC-SR04 serait l'idéal pour la détection d'obstacles d'après vous ?
Je l'ai placé sur Glenn pour voir avec sont cône de détection...
Ou alors existe t'il un autre moyen de détecter des obstacles sur un champ plus large ?
Le truc qui m'aurait plu et la projection de points pour obtenir un certains relief de se que le robot peu détecter (chose que j'aimerais bien pouvoir intégrer au niveau de la cam de Glenn).
(...)
Pour faire plaisir à Mike (désolé si le propos est un peu mélangé, c'est une transcription feignante de ma réponse sur le Discord)
 :
:Si tu veux juste mesurer la distance au sol/vers l'avant (pour détecter un obstacle) un seul capteur est en général suffisant. Le robot ne saura pas ce qu'il a sous les pieds à ce moment, mais comme le capteur regarde devant lui, il aura toujours l'info de s'il y a un trou là où il va aller.
Par contre, ce genre de capteur (HCSR04, VLX, infrarouge, etc ...) donne une mesure ponctuelle (pas exactement, mais c'estce qu'on suppose), dans une direction theta. Donc pour avoir une mesure dans la direction theta+1°, il faut ré-orienter le capteur/le robot, ou mettre plusieurs capteurs fixes dans des directions différentes en faisant attention à ce qu'ils n'aient pas d'interaction (e.g. ultrason ou infrarouge). Pour avoir tester un capteur US monté sur un servo sur Froggy (voir ici: https://www.youtube....h?v=w7kXEE_CMCU), je recommande les multiples capteurs fixes, parce que faire tourner le servo, faire une mesure et recommencer, c'est long par rapport à la vitesse de commande des moteurs, et si le robot bouge pendant ce temps, on ne sait plus vraiment dans quelle direction réelle la mesure est faite. Avec deux capteurs, on a juste à les lire pour avoir deux infos cohérentes.
La version ultime de la première option (qui résout le problème que j'évoque), ce sont les lasers rotatif type RPLidar, Hokuyo LX30, qui font tourner un capteur ou un miroir très vite à 360° pour avoir un profil dans toutes les directions.
Ces capteurs mesurent dans le plan orthogonal à l'axe de rotation, si tu veux mesurer tout l'espace devant le robot, il faut faire tourner le capteur sur lui-même (pour mesurer dans le plan) puis dans la troisième direction (orthogonale au plan de rotation).
La solution "cheap" (mais très lente), c'est d'avoir un capteur HCSR04 sur une tourelle pan-tilt. Une phase de mesure revient à positionner les servos dans toutes les combinaisons d'angles voulues et faire une mesure de distance avec le capteur. Mais attention, même problème que j'évoquais plus haut: si le robot bouge avant d'avoir fini un scan, les données seront incohérentes.
Solution alternative: utiliser une camera type Kinect qui te renvoie directement l'image et l'image de profondeur de là où vise la caméra. Voir Xtion, Intel Realsense pour des capteurs similaires.
Bien évidemment le prix augmente en conséquence

[href^="http://www.roboform.com/php/land.php"]
{display:none !important;}
- Oliver17 aime ceci
#909
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 08 mai 2019 - 06:08
Faut réflèchir à tout ça, car le torse du robot ne sera pas fixe lors de la marche (enfin en admettons qu'il marche), pour la kinect pas la peine, beaucoup trop gros et trop lourd mais j'aime beaucoup le principe du système pouvant détecter la profondeur comme avec une projection de points
J'ai vu plusieurs type de caméra dont un fabricant vraiment pas "cher" comparer à ce que l'on peut voir sur le marcher, dites moi se que vous en penser si vous avez un moment, merci...
https://orbbec3d.com/robotics-3/#
Merci ^^
#910
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 11 mai 2019 - 09:29
Coucou, bon j'attend toujours vos avis sur ce système de cam (voir lien post précédent), sinon je suis tombé sur ça, la description fait envie, le prix moins mais bon ce n'est pas si excessif je trouve.
Et en plus cette cam correspondrait à mes attentes, mais étant un noob je ne me fie qu'à la description je n'ai aucune idée sur ces réel performances.
https://www.seeedstu...era-p-3025.html
#911
Mike118
-

- Administrateur
-
- 10â¯342 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 11 mai 2019 - 05:19
Je ne connais pas cette mini camera 3D mais je connais un peu les cam 3D astra, c'est pas mal =)
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#912
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 13 juin 2019 - 08:40
Heeyyyy les copains "os court" j'ai deux modules qui se branche en SDA/SCL le VL53L0x et l'IMU9250, j'ai bien regardé sur le net un peu le pourquoi du comment, mais j'ai un peu peur de faire une connerie, apparemment il faut placer des résistances, mais après suis je obligé, comment bien brancher tout ça, avez vous des conseils ou liens super bien pour gros noob comme moi ^^
Merci. ^^
#913
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
#915
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 14 juin 2019 - 07:46
Ah ah ahhhhh
IMU9250 en SPI : OK
VL53l0x en I2C : OK
Led : OK
Il me reste l'écran E-paper, une sonde pour la température, les ventilos et voir pour rajouter de minuscule led si j'ai de la place sur l'esp ^^
Programmer pour que tout fonctionne ensemble, c'est pas gagner lol
- Forthman aime ceci
#916
Amhnemus
-

- Membres
-
- 593 messages
Membre passionné
- Gender:Male
- Location:Montigny-le-bretonneux
Posté 14 juin 2019 - 07:50
Tu va y arriver
1ère place Robot Warrior 2019 humanoïdes autonome
#917
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 14 juin 2019 - 08:48
J'espère, je trouve ça passionnant de savoir que l'on peut créer des trucs (bon pas trop compliqué certes) ça me fait délirer
Puis surtout lorsque ça fonctionne sans trop de prise de tête c'est encore mieux lol
Et l'esp pour l'instant c'est un régal, je vais peut être déchanter plus tard, mais là miam
- Amhnemus aime ceci
#918
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 14 juin 2019 - 05:07
La misère, bon ben du coup il faut que mon écran soit en SPI, du coup je me suis dis je dois bien pouvoir créer un second accès i2c pour y placer l'IMU et non j'ai pas trouvé, je suis bien tombé sur des sujet divers et varié mais rien ne fonctionne, je crois que je ne vais pas avoir le choix de revenir à la case départ pour placer en série l'IMU9250 et le VL53l0x, et zut tiens.
Edit : ah ben non apparemment : https://riot-os.org/..._i2c_interfaces
va falloir que je revois ça à tête reposé ^^
#919
Oliver17
-
- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn
Posté 15 juin 2019 - 11:05
Bon et bien je n'arrive pas à trouver comment changer une adresse I2C dans une lib, c'est là que je déchante, quelqu'un aurait une idée ?
Je sais que sur l'esp je peux attribuer une seconde adresse pour l'I2C : https://riot-os.org/..._i2c_interfaces
Mais voilà, je ne sais pas comment faire, ou alors essayer de changer ça dans les gpio du .h
Je nageeeeee...
#920
Jekert
-

- Modérateur
-
- 227 messages
Auteur
- Gender:Male
Posté 15 juin 2019 - 12:10
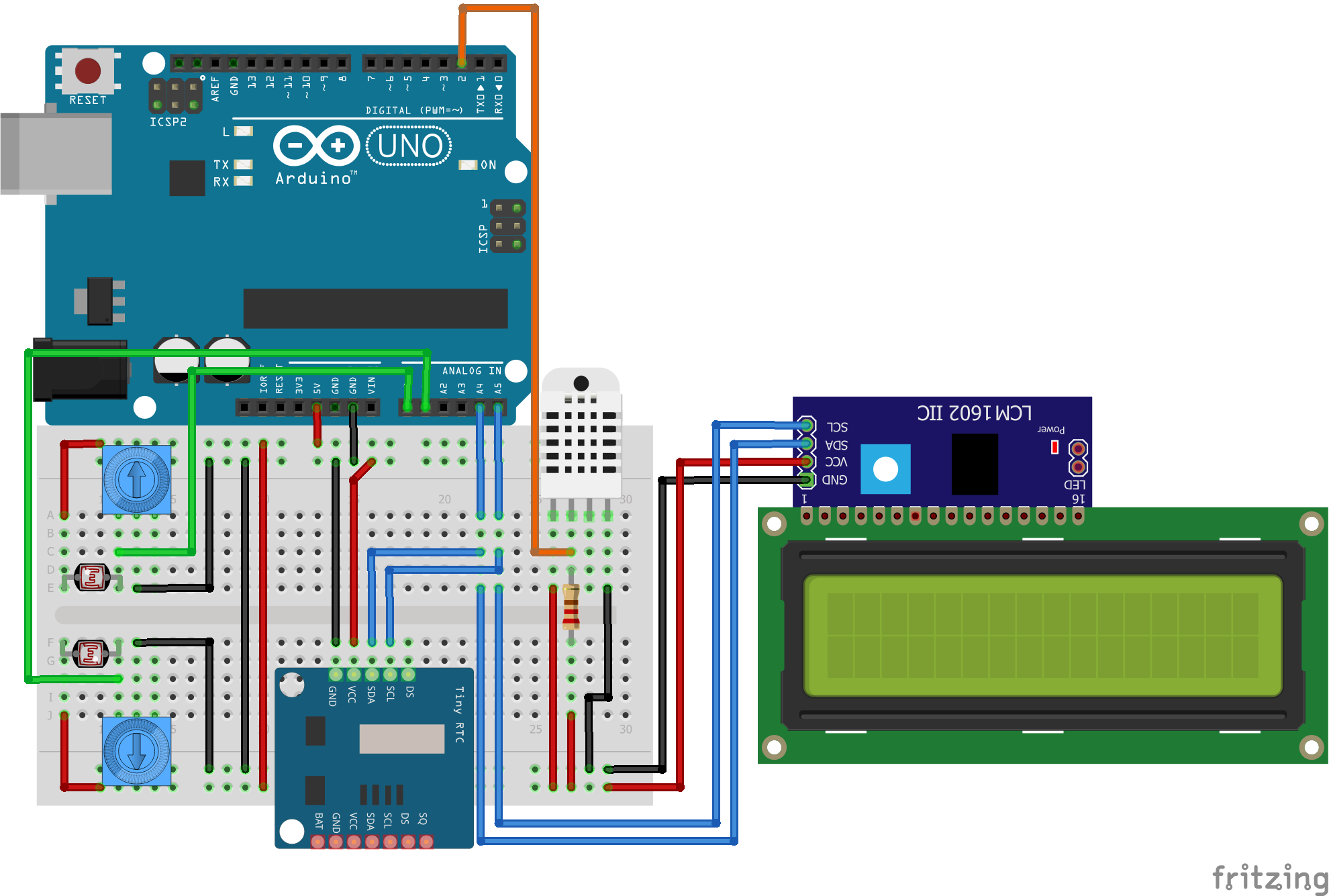
Tu m'as perdu, j'ai du mal à comprendre ton problème. Tu as donc deux capteurs utilisant l'I2C, si c'est 2 esclaves tu ne devrais avoir aucun problèmes pour les connecter les deux en parallèle à ton esp en maitre si ils ont la même tension d'alimentation. Je l'avais déjà fait sans problèmes pour ma station météo où tout est en 5V (l'écran et le module RTC sont tout les 2 branchés sur les pins I2C de l'arduino) je sais pas si c'est différent pour esp:
J'ai pas bien compris plusieurs trucs dans tes derniers messages :
- Pourquoi vouloir les mettre en série ? Et comment ?
- Pourquoi tu veux changer une adresse I2C dans une bibliothèque ? Quelle bibliothèque ?
- Pourquoi tu veux 2 adresses I2C ?
- Et plus généralement, qu'es-ce que tu as réussi à faire et que tu n'as pas réussi ? Es-ce que tu as déjà réussi à communiquer en I2C avec l'IMU seul ?
Mon blog ------ 101robotics.com
Ouvrage ----- Guide pour débuter avec Arduino
Ancien Blog -- Journal d'un Arduinaute






1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users

