
Bravo ! Bravissimo !

252 réponses à ce sujet
#41

Oracid
-

- Modérateur
-

- 7â¯030 messages
Pilier du forum
- Gender:Male
#42
Ulysse
-
- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 25 octobre 2016 - 09:54
Merci, merci beaucoup pour vos encouragements 
Le vidéo de ce matin, alors que la marée était base, ce qui a permis à Pablo de se dégourdir les roues.
Le gros point à travailler est maintenant l'outil pour tracer. Je vais compiler les idées émises sur ce post et me mettre au travail. Pour moi c'est aussi compliqué de le réaliser que ce qui a été réalisé sur Pablo jusqu'à aujourd'hui.
A suivre donc ...
#43
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 26 octobre 2016 - 06:53
Moi, je tenterais le coup à la main.Oui, au fait, pour la charrue.
Que penses tu de trainer un paillasson ?
Ça se vend dans la longueur que l'on veut, c'est assez lourd et les aiguilles me semble de bonnes dimensions.
Tu prends ton paillasson et tu testes toi même.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#44
macerobotics
-

- Membres
-
- 164 messages
Membre occasionnel
- Gender:Not Telling
- Location:Bretagne
Posté 26 octobre 2016 - 07:49
Bonjour,
Félicitation pour la vidéo du robot Pablo.
Mace Robotics - Conception & réparation électronique
#45
Ulysse
-
- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 26 octobre 2016 - 11:02
Félicitation pour la vidéo du robot Pablo.
Merci beaucoup, les encouragements font toujours très plaisir 
Moi, je tenterais le coup à la main.
Tu prends ton paillasson et tu testes toi même.
avec les contraintes suivantes :
- Aujourd'hui Pablo est équipé d'un simple piquet fixe qu'il traine derrière lui, sans possibilité de le remonter.
L'outil doit se lever et s'abaisser à la demande (logiciellement parlant c'est déjà implémenté)
- Lorsque le rover traverse une zone de sable gorgée d'eau il arrive que ses roues s'enfoncent avec pour conséquence de planter le piquet encore plus profond et donc de potentiellement clouer Pablo sur place.
L'outil doit suivre le relief et donc posséder ses propres roues pour se maintenir au niveau du sable.
- L'essai d'un outil avec 10 grosses griffes montrent que trop de trainée freine le robot. D'ailleurs même à la main l'effort est trop important.
S'il y a griffes elles doivent être fines et courtes. Inutile de faire plus profond, le marquage est aussi bien marqué.
- Tout ce qui est traîné génère une résistance qui peut dans certains cas ralentir voire stopper le rover.
Un outil motorisé serait un vrai plus
On s'oriente vers un outil qui se lève et s'abaisse, avec des ergots sur un rouleau en mouvement. Ça va être simple ... 
#46
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 26 octobre 2016 - 02:15
Ok, je comprends.
J'avais pensé également à des brosses chien dents (pour nettoyer les sols).
L'avantage de ces brosses, c'est qu'elles ont un pas de vis genre balaie.
Pour suivre le relief, un système d'amortisseur très souple, peut-être ?
J'avais pensé également à des brosses chien dents (pour nettoyer les sols).
L'avantage de ces brosses, c'est qu'elles ont un pas de vis genre balaie.
Pour suivre le relief, un système d'amortisseur très souple, peut-être ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#47
Ulysse
-
- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 05 novembre 2016 - 02:07
Quelques nouvelles : Pablo a fait une troisième sortie équipé d'un simple râteau réalisé à partir de tiges en acier histoire de laisser une plus large trace. Le travail continue sur le nouvel outil mécanique et ce n'est franchement pas le plus facile ( pour mon cas c'est plus simple de taper des lignes de code que tronçonner des barres à la meuleuse ! ). Ça doit être solide et léger. Mais ça se précise...
Mais la récompense reste les contacts par dizaines avec les badauds curieux qui se risquent à demander "c'est quoi cette chose ? "  Je vais finir par imprimer des flyers pour expliquer le travail réalisé. C'est très encourageant .
Je vais finir par imprimer des flyers pour expliquer le travail réalisé. C'est très encourageant . 

#49
levend
-

- Membres
-
- 5â¯724 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 05 novembre 2016 - 06:35
Tu aurais pu l'appeler Nasca (ou Nazca) 
Ton outils n'est pas définitif ? au final ne sera-t-il pas plus large pour recouvrir les traces laissées par les roues du robot ?
Sur ta vidéo, les traces laissées par les roues sont visibles, mais vu de plus haut, le seront-elles ...
Beau travail, manque plus qu'une vue d'ensemble de l'oeuvre d'art réalisée .
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#50
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 05 novembre 2016 - 07:05
Tu n'as plus qu'à filmer avec un drone.
Ton projet avance bien.
Bravo.
Ton projet avance bien.
Bravo.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#51
Ulysse
-
- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 05 novembre 2016 - 07:06
Dès que vous avez un dessin géant de pablo, je suis très curieux.
Promis M'sieur
Tu aurais pu l'appeler Nasca (ou Nazca)
Ton outils n'est pas définitif ? au final ne sera-t-il pas plus large pour recouvrir les traces laissées par les roues du robot ?
Sur ta vidéo, les traces laissées par les roues sont visibles, mais vu de plus haut, le seront-elles ...
Beau travail, manque plus qu'une vue d'ensemble de l'oeuvre d'art réalisée
Nazca , oui bien évidement ! Mais c'est ma fille qui a trouvé le nom Pablo ( l'artiste ) donc je n'ai pas pu luter 
L'outil de tracé en cours de construction est un rouleau PVC rotatif équipé d' ergots pour bien marquer le sable humide (10 cm de diamètre, 50 cm de longueur) qui est tracté et relevé / abaissé à l'arrière de Pablo. Sa largeur est légèrement supérieure à la voie (la distance entre les deux roues motrices) pour couvrir les éventuelles traces laissées par les roues. Les marques de roues sont négligeables en comparaison des traces des griffes, notre vision fonctionne beaucoup par comparaison.
Patience, encore quelques gribouillages et on fera quelque chose de bien, le drone est prêt à filmer !



#55
Mike118
-

- Administrateur
-
- 10â¯340 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 05 novembre 2016 - 07:31

Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!

#57
Ulysse
-
- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 07 novembre 2016 - 10:05
Qui sais on verra peut être un jour le résultat sur Google map!
Ça ferait une sacrée pub, écrit en gros "Robot-maker.com" ^^
Le fichier pour Pablo est prêt ! 
Sinon l'outil avance, grâce à Mike118 qui m'a orienté vers quelque chose comme un rouleau de scarificateur. C'est en cours de construction !
#58
Ulysse
-
- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 25 novembre 2016 - 07:57
Tudju ... rien posté depuis presque trois semaines, j'ai eu du mal à retrouver mon propre post ...
Côté mécanique la naissance de l'outil se passe bien, je vous montre ça très bientôt.
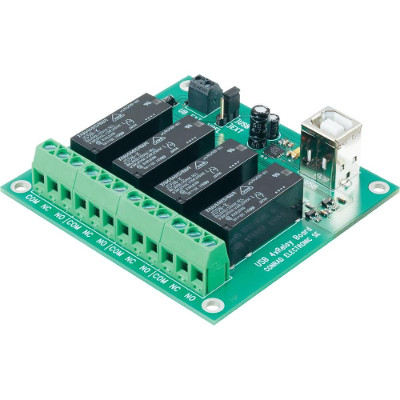
Et pour piloter cette partie-là Pablo se voit offrir une nouvelle interface électrique : une carte équipée de quatre relais pilotés par USB. Et bien croyez le ou pas mais côté logiciel c'est l'interface qui m'a donné le plus de souci pour l'intégrer en visual studio (C#). Mais c'est fait et ça fonctionne parfaitement.
#59
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 26 novembre 2016 - 07:26
Peux-tu nous dire où tu l'as achetée ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#60
Ulysse
-
- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 03 décembre 2016 - 09:42
Peux-tu nous dire où tu l'as achetée ?
Çà se trouve chez Conrad à 25 Euros. Je ne l'ai pas achetée spécialement pour l'occasion, c'est du matériel récupéré dans un fond de tiroir.
Sinon comme je suis très fainéant en ce moment pour terminer la mécanique (il fait froid dans le garage) je préfère implémenter de nouvelles fonctions sur Pablo.
Cette semaine j'ai ajouté une télécommande radio (RF4CE) qui me permet de balader le monstre à distance.
La zapette est une simple télécommande d'un décodeur SFR (les télécommandes du décodeur Evolution ne sont pas compatibles RF4CE)

On ajoute un dongle USB pour capter les signaux radio (vu une nouvelle fois comme un port de communication série), une nouvelle classe à partir de quelques lignes de code sous C# pour appairer les modules et lire les trames, et voici Pablo dirigé sans fil.
Les touches permettent de diriger à droite, à gauche, en avant et en arrière, stopper, commander les 4 relais de puissance, lancer la navigation pour réaliser les figures programmées...
Mais c'est juste un moyen de manœuvrer le rover, car dans ce mode on ne peut plus appeler ça un robot, tout juste un gros jouet télécommandé. C'est juste utile pour amener Pablo du parking à la plage et pour en revenir.
Cette nouvelle fonction remplace le joystick connecté sur un port USB.
Répondre à ce sujet









Aussi étiqueté avec au moins un de ces mots-clés : UGV, Land Art
Projets et réalisations, robots et machines en tout genre →
Robots roulants, chars à chenilles et autres machines sur roues →
[Projet Rover 2WD] Mon robot de surveillance mobile et télécommandéDébuté par gerardosamara, 27 mars 2016 |
|
![[Projet Rover 2WD] Mon robot de surveillance mobile et télécommandé - dernier message par gerardosamara](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-9527.jpg?_r=1459009420)
|
||
Bienvenue sur Robot Maker →
Conseils et aide aux débutants, livres et kits en robotique →
Plateforme de développementDébuté par Taupiot_Jr, 24 nov. 2014 |
|
|
0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users

