
Sinon comme je suis très fainéant en ce moment pour terminer la mécanique (il fait froid dans le garage) .
Je ne suis donc pas le seul que le froid dérange pour bricoler ...

Pilier du forum


Posté 03 décembre 2016 - 09:50
Sinon comme je suis très fainéant en ce moment pour terminer la mécanique (il fait froid dans le garage) .
Je ne suis donc pas le seul que le froid dérange pour bricoler ...
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
Staff Robot Maker

Posté 03 décembre 2016 - 09:59
Çà se trouve chez Conrad à 25 Euros. Je ne l'ai pas achetée spécialement pour l'occasion, c'est du matériel récupéré dans un fond de tiroir.
Sinon comme je suis très fainéant en ce moment pour terminer la mécanique (il fait froid dans le garage) je préfère implémenter de nouvelles fonctions sur Pablo.
Cette semaine j'ai ajouté une télécommande radio (RF4CE) qui me permet de balader le monstre à distance.
La zapette est une simple télécommande d'un décodeur SFR (les télécommandes du décodeur Evolution ne sont pas compatibles RF4CE)
On ajoute un dongle USB pour capter les signaux radio (vu une nouvelle fois comme un port de communication série), une nouvelle classe à partir de quelques lignes de code sous C# pour appairer les modules et lire les trames, et voici Pablo dirigé sans fil.
Les touches permettent de diriger à droite, à gauche, en avant et en arrière, stopper, commander les 4 relais de puissance, lancer la navigation pour réaliser les figures programmées...
Mais c'est juste un moyen de manœuvrer le rover, car dans ce mode on ne peut plus appeler ça un robot, tout juste un gros jouet télécommandé. C'est juste utile pour amener Pablo du parking à la plage et pour en revenir.
Cette nouvelle fonction remplace le joystick connecté sur un port USB.
Si tu en faisais un tuto je suis sûr que beaucoup de gens seraient intéressé  Imagine un robot boxeur télecommandé par ta zapette
Imagine un robot boxeur télecommandé par ta zapette 
Perso avant que je ne lise ton message je ne savais même pas qu'il y avait ce genre de télécommande.... Moi j'en étais resté à la récupération de trame de télécommandes infrarouge avec le récepteur IR adéquate ^^ et mon petit doigt me dit que ta méthode est peut être plus simple
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Habitué
Posté 03 décembre 2016 - 10:31
Ha oui bien sûr je peux développer ce sujet. Je partage bien volontiers l'évolution de Pablo mais j'essaie de ne pas trop noyer le post avec une foule de détails qui pourrait fatiguer ceux qui font déjà l'effort de suivre. Mais ok oui ça pourrait peut-être intéresser quelques makers. Je prépare ça.
Habitué

Posté 05 décembre 2016 - 06:31
Bravo Ulysse, c'est magique ! vivement le premier dessin 
Habitué
Posté 07 décembre 2016 - 09:43
Je ne suis donc pas le seul que le froid dérange pour bricoler ...
Oui, j'ai vraiment du mal à me motiver pour bricoler la mécanique au froid. La bonne nouvelle c'est que les températures remontent cette semaine donc usage probable de la disqueuse ce week-end 
Bravo Ulysse, c'est magique ! vivement le premier dessin
Merci, ça vient. A son rythme, mais ça avance. Pour l'instant j'ai 1 mois de retard sur le planning que je m'était fixé. Ça va 
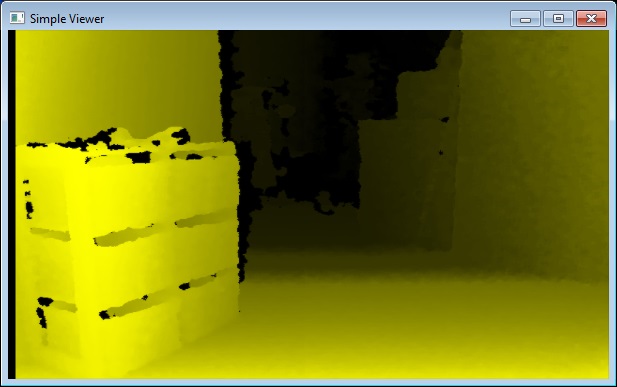
Côté capteur je suis en train de faire des essais avec une Kinect de XBOX 360 pour la détection des obstacles en utilisant sa capacité à renvoyer une image dont la luminance varie en fonction de la proximité de l'objet grâce à son "3D depth sensor".
Rien à redire, ça fonctionne vraiment bien même à l'extérieur. Les objets très près ( moins de 1 mètre ) ne sont plus détectés.
L'intégration dans un programme C# ne pose pas de souci, il y a des exemples complets disponibles et pas mal de makers l'utilisent déjà pour détecter les obstacles.
Le seul souci pour moi c'est qu'il faut un ordinateur plus puissant ( au minimum 2 cœurs ) pour que la vidéo soit fluide, alors que Pablo tourne sur un système très léger peu gourmand en consommation électrique ( Asus EeePC, la précédente carte mère consommait 10 Ampères !)
Donc pour l'instant pas de Kinect pour Pablo, mais c'est un périphérique bigrement intéressant !
Staff Robot Maker
Posté 08 décembre 2016 - 12:34
 Pour le boulot on utilise une odroid xu4 derrière la kinect Mais c'est pas en vente sur le shop ^^
Pour le boulot on utilise une odroid xu4 derrière la kinect Mais c'est pas en vente sur le shop ^^
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Habitué
Posté 10 décembre 2016 - 06:48
Merci du conseil, c'est une bien jolie carte de développement. Il faudra que je trouve quelque chose de semblable compatible Win10.
Et côté outil ça découpe le plastique, ça tronçonne l'acier, ça perce l'aluminium. Bref ça empeste le garage. 
Membre chevronné

Posté 10 décembre 2016 - 07:00
Membre occasionnel

Posté 13 décembre 2016 - 09:39
Sinon pour la détection d'obstacle je vais essayer ça
https://www.element1...ng-on-logi-bone
C'est moins gourmand
Habitué
Posté 13 décembre 2016 - 10:09
Tout à fait, c'est quelque chose qui marche très bien, acquisition rapide de l'image même sur un système léger et assez facile à programmer. Mécaniquement il faut bien aligner tout ça.
http://www.robot-maker.com/forum/topic/10745-pablo-odysseus-robot-artist-land-art/page-2#entry75145
Petit souci pour Pablo : le soleil lorsqu'il est bas sur l'horizon et vient directement frapper l'objectif de la caméra, par exemple le matin ou en fin d'après midi. Casquette obligatoire
Habitué
Posté 16 décembre 2016 - 09:51
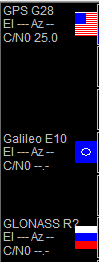
Journée historique pour Pablo : il vient ce matin de renifler son premier satellite Galileo, très précisement E10. Oui madame. Il a fallut d'abord upgrader le firmware de la puce NEO M8N avec la version 3.01.
Il faut rappeler que Pablo se base sur ces satellites pour naviguer, et que du coup il peut se baser sur trois constellations ; GPS (américain), GLONASS (Russe) et petit à petit Galileo (Européen).
Certes les signaux sont faibles au fond du garage, on verra bien en champ libre.
D'autres apparaissent et disparaissent au fur et à mesure de la journée :


Bonne nouvelle ça. Bonne nouvelle..
Habitué
Posté 16 décembre 2016 - 10:34
Ça à l'air génial ce NEO M8N. C'est surement ce que Tony Stark a utilisé dans chaque élément de son armure auto-guidé
Pilier du forum

Posté 16 décembre 2016 - 08:52
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre occasionnel

Posté 17 décembre 2016 - 10:00
Galileo est techniquement plus precis, mais je ne sais c'est pas si la précision maximale est déjà activée, et à quel point elle est accessible.
Par contre les satellites sont placés pour optimiser la triangulation sur l'europe, là ou le GPS est optimisée pour la triangulation sur les US ( et glonass sur la Russie).
Donc en règle générale il y aura plus de satellite visible, et une bonne précision nécessitera moins de satellite visible quelque soit l'augmentation de précision des satellite eux mêmes.
Pilier du forum
Posté 17 décembre 2016 - 11:48
En réalité Galileo n'est pas plus précis que le GPS (précision au cm près), c'est juste que cette précision n'est pas accessible par tous pour le GPS, contrairement à Galileo où il y a eu la volonté d'apporter plus de précision à chacun.
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
Pilier du forum
Pilier du forum










Projets et réalisations, robots et machines en tout genre →
Robots roulants, chars à chenilles et autres machines sur roues →
[Projet Rover 2WD] Mon robot de surveillance mobile et télécommandéDébuté par gerardosamara, 27 mars 2016 |
|
![[Projet Rover 2WD] Mon robot de surveillance mobile et télécommandé - dernier message par gerardosamara](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-9527.jpg?_r=1459009420)
|
||
Bienvenue sur Robot Maker →
Conseils et aide aux débutants, livres et kits en robotique →
Plateforme de développementDébuté par Taupiot_Jr, 24 nov. 2014 |
|
|
0 members, 1 guests, 0 anonymous users






