Superbe projet! J'aimerai avoir les mêmes connaissances que toi pour la programmation des différents softs.
Je suis plus à l'aise sur la mécanique pour l'instant. 
Hâte de le voir fonctionner.

Pilier du forum


Posté 13 mars 2017 - 08:02
Oui, parfois, on est plus à l'aise avec une alèse... 

Ma chaine YouTube : https://www.youtube..../oracid1/videos
Pilier du forum
Posté 14 mars 2017 - 08:10
Ah ! Dommage ! Je la trouvais excellente, celle là !Merci Oracid, je viens de corriger
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Habitué
Posté 01 avril 2017 - 11:59
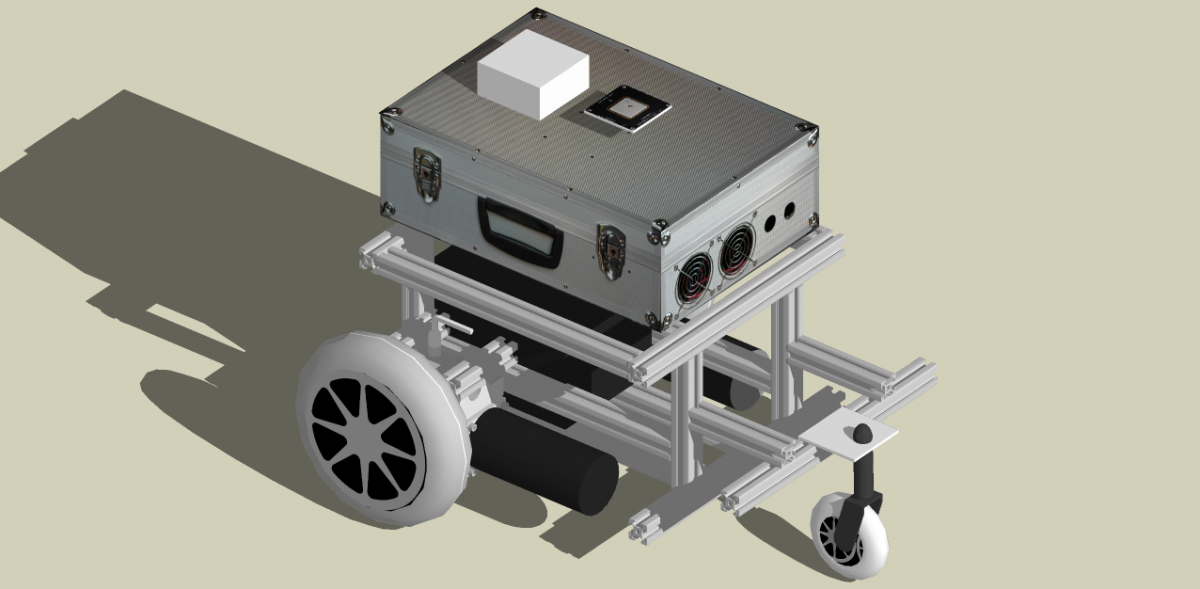
A ce jour, l'IHM de Pablo permet d'accéder à tout ses capteurs et actionneurs : l'odomètre, le compas, le saberthooth, le récepteur GNSS, la carte entrées/sorties, la carte GMAP et le navigateur, bref tout ce qui permet au logiciel de faire le travail. C'est très pratique pour la mise point mais ça reste inutile lorsque le rover est sur le terrain puisqu'il est autonome. Donc d'ici quelques temps tout ces afficheurs vont disparaitre :
On va plutôt logger les mesures pour les exploiter au retour et dire bye bye à tout ça.
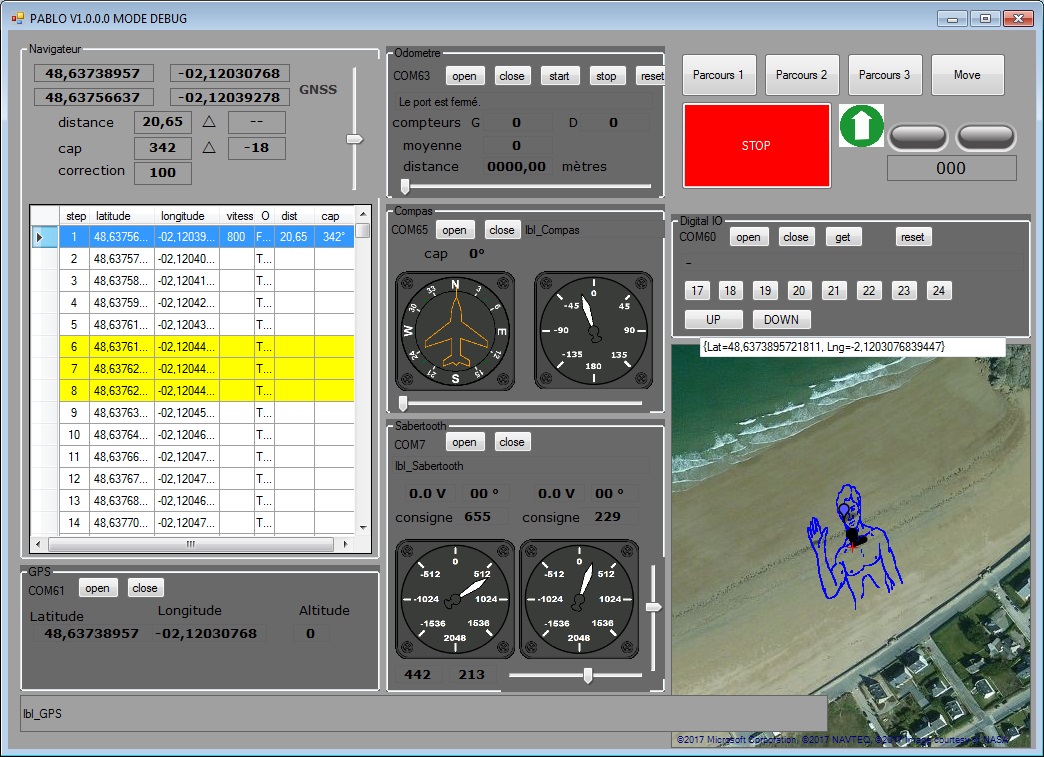
Côté navigateur, petit changement de stratégie. Du fait des imprécisions liées au système satellite, on fait appel à l'odomètre lorsque la distance à parcourir est inférieure à 1 mètre (à ajuster par essais) , au récepteur GNSS sinon, au compas dans tous les cas. En mode DEBUG ça ce passe bien (c'est un mode où je simule en live les données des capteurs par des informations que je maitrise avec des curseurs), à voir sur le terrain ce que ça donne.
Bon alors voyons voir la marée ...
Pilier du forum
Posté 07 avril 2017 - 05:38
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre passionné

Posté 07 avril 2017 - 10:46
en haut à gauche de l'image : hackaday.com
Sinon plus directement : http://hackaday.com/2017/04/03/lego-liquid-handler-and-big-biology/
Membre passionné

Posté 20 avril 2017 - 07:37
Je viens de voir ce post : https://blog.arduino...rt-in-the-sand/ Félicitation 
Pilier du forum

Habitué
Posté 20 avril 2017 - 06:17
Membre passionné

Posté 30 avril 2017 - 01:45
Un article mérité sur le célèbre blog Hackaday.
http://hackaday.com/2017/04/29/hackaday-prize-an-autonomous-beach-art-robot/
Ca doit faire un sacré coup de pub.
Bravo.
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
Habitué
Posté 30 avril 2017 - 06:10
Pilier du forum
Posté 30 avril 2017 - 06:29
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre passionné
Posté 01 mai 2017 - 06:25
Sinon, tu as déjà réussi un dessin complet? Je ne vois aucune photo d'ensemble d'un dessin complet, et ça serait vraiment chouette.
Si nécessaire avec une vue aérienne depuis un drone. Il y a forcément des volontaires équipés de drone dans ton coin, si tu n'en n'as pas un toi même!
Voire carrément une vidéo aérienne...
Côté navigateur, petit changement de stratégie. Du fait des imprécisions liées au système satellite, on fait appel à l'odomètre lorsque la distance à parcourir est inférieure à 1 mètre (à ajuster par essais) , au récepteur GNSS sinon, au compas dans tous les cas. En mode DEBUG ça ce passe bien (c'est un mode où je simule en live les données des capteurs par des informations que je maitrise avec des curseurs), à voir sur le terrain ce que ça donne.
Par rapport à ça, la meilleure stratégie reste la "fusion de données". N'utiliser qu'un seul jeu de données "position / orientation", qui est élaboré à partir de la fusion des données GNSS et odomètres.
Dans le principe : l'odomètre renseigne la partie "haute fréquence" du signal, et le GNSS la partie "basse fréquence".
Une méthode simple pour faire cette fusion de données :
1) tu mets à jour en temps réel la position avec l'odomètre. C'est précis sur les petits déplacements, et la précision de mesure est très bonne (quelques cm).
2) Mais en plus, tu recales lentement la position par rapport au satellite. Le lentement est super important. Par exemple, si tu as un signal GNSS toutes les secondes, tu ne recales (par exemple) que de 5% de l'écart entre la position estimée et la position GNSS chaque seconde. Ca fait que ça converge en ~20sec. la vitesse de recalage sera bien évidemment à affiner avec des tests sur le terrain.
Si ton robot fait des pauses ou roule à basse vitesse, pour éviter les "sauts" de l'estimation de position (à cause de la dérive GNSS), tu peux aussi choisir la vitesse de recalage en fonction de la vitesse réelle du robot: à l'arrêt, tu ne te recales pas du tout, et à haute vitesse tu te recales rapidement. Du coup, tu te recales de X% tous les mètres (non plus toutes les secondes).
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)









Projets et réalisations, robots et machines en tout genre →
Robots roulants, chars à chenilles et autres machines sur roues →
[Projet Rover 2WD] Mon robot de surveillance mobile et télécommandéDébuté par gerardosamara, 27 mars 2016 |
|
![[Projet Rover 2WD] Mon robot de surveillance mobile et télécommandé - dernier message par gerardosamara](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-9527.jpg?_r=1459009420)
|
||
Bienvenue sur Robot Maker →
Conseils et aide aux débutants, livres et kits en robotique →
Plateforme de développementDébuté par Taupiot_Jr, 24 nov. 2014 |
|

|
0 members, 1 guests, 0 anonymous users