Janvier.
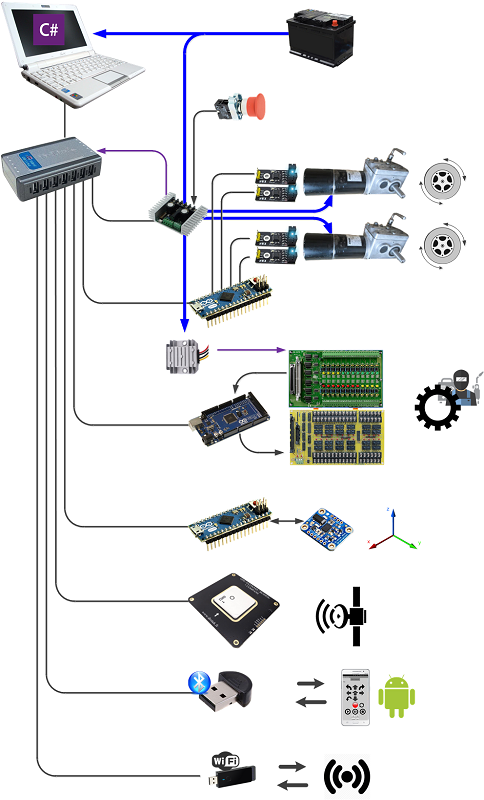
Finalement la petite carte avec 4 relais pilotée par USB est trop limitée et surtout il me manque une interface pour lire des états de capteurs. Je décide donc de bidouiller quelque chose avec plus de possibilités.
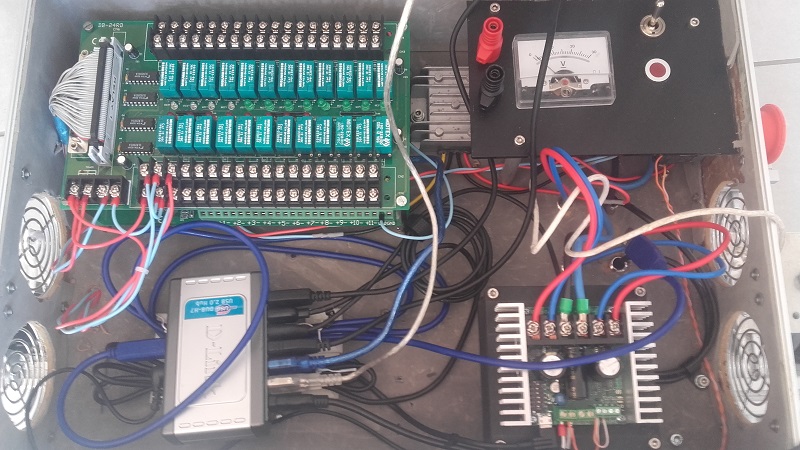
Ça tombe bien pour deux cartes interfaces abandonnées dans le garage au fond d'une caisse :
une carte DB-24RD avec 24 relais
une carte DB-24PD avec 24 entrées opto-isolées
Pour les interfacer avec Pablo, je prends une carte Arduino Mega (clone) de votre site préféré.
Les 24 relais étant prévus pour fonctionner sous 24 Volts, je les change par des modèles 12 Volts. Et comme ils sont directement soudés sur le circuit je profite de l'opération pour les placer sur supports. J'ai compté : 192 points à dessouder à la main ( sans faire de mal au circuit ), plus de 300 soudures en comptant le cablage vers la carte Mega.
La carte Mega est située sous les interfaces
Voici donc Pablo équipé d'une interface avec 24 relais pour alimenter les moteurs de l'outil (marche/arrêt; levé/baissé) et bien d'autres extensions, et d'une interface avec 24 entrés opto-isolées pour les capteurs de l'outil (en haut/en bas) et d'autres surprises. On n'est plus limité.
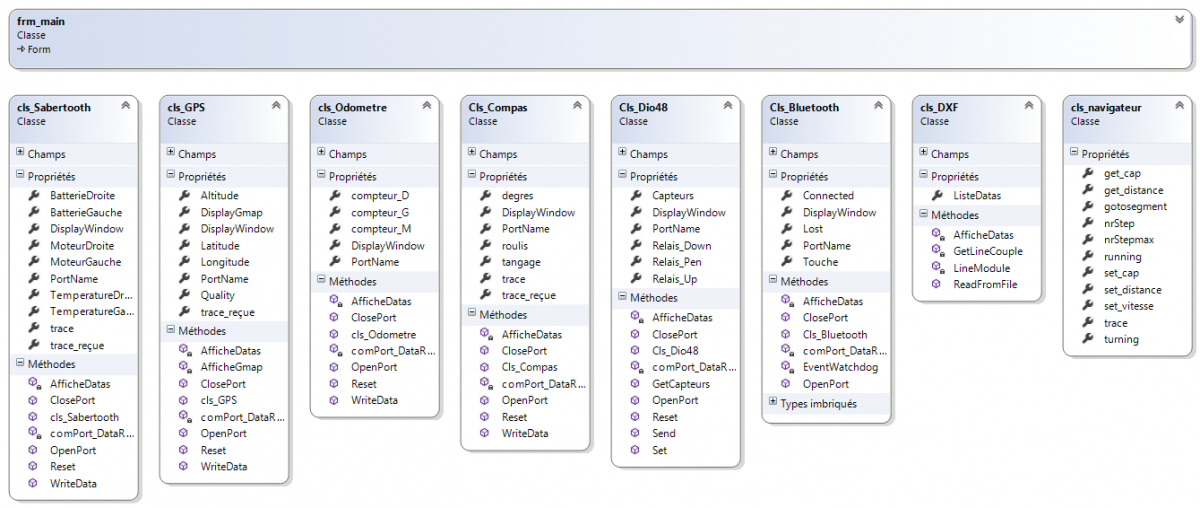
Pour piloter cette interface, un petit programme avec quelques mots simples :
INFO - retourne le nom de l'interface
RESET - relâche tous les relais
GET - retourne l'état des 24 entrées
ON_xx - alimente le relais xx
OFF_xx - relâche le relais xx
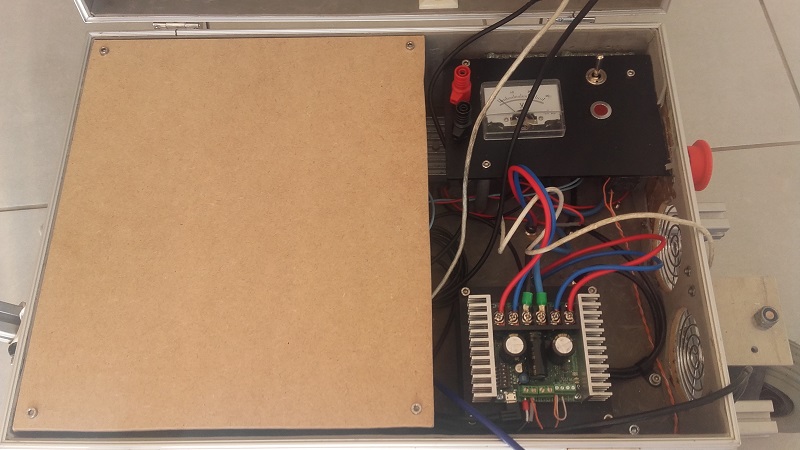
Tout ça fait tout de même un petit volume ( 22 x 14 x 8 cm ) qu'il faut faire entrer sous le capot.
Mais aux dernières nouvelles, Pablo pourrait bien grossir et prendre du poids.






















![[Projet Rover 2WD] Mon robot de surveillance mobile et télécommandé - dernier message par gerardosamara](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-9527.jpg?_r=1459009420)


