Je pense qu'il parle de la simulation sur anykode ...

WALK-E, Crowdfunding sur Ulule, Soutenez nous !!!
Débuté par yougo, mai 29 2017 08:27
Crowfunging financement participatif Robot bipède
209 réponses à ce sujet
#121

Mike118
-

- Administrateur
-

- 10â¯310 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 08 juillet 2017 - 04:21
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#122
Path
-

- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 08 juillet 2017 - 04:24
Ha pardon 
#123
yougo
-
- Membres
-
- 235 messages
Membre occasionnel
Posté 08 juillet 2017 - 05:09
Bien sur que je parle d'anykode ahahaha  ca va les servos en vrai je sais faire, mais sur le logiciel ... c'est spécial !
ca va les servos en vrai je sais faire, mais sur le logiciel ... c'est spécial !
#124
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 08 juillet 2017 - 05:29
Tu m'as fait peur j'avoue.
#126
R1D1
-

- Modérateur
-
- 1â¯212 messages
Modérateur et Membre passionné
- Gender:Male
- Location:Autriche
Posté 08 juillet 2017 - 09:01
Essaie d'invoquer Léon, c'est le plus à même de te répondre 
Sinon, il n'y a pas des exemples déjà disponibles pour lesquels tu peux regarder le code et l'adapter à ton cas ?
#127
R2D21995
-

- Membres
-
- 385 messages
Habitué
Posté 08 juillet 2017 - 09:40
Regarde de ce côté la peut-être http://doc.anykode.fr/frames.html?frmname=topic&frmfile=tutochar.hitml
- R2D21995 aime ceci
Il faut toujours viser la lune, car même en cas d’échec, on atterrit dans les étoiles
#128
yougo
-
- Membres
-
- 235 messages
Membre occasionnel
Posté 08 juillet 2017 - 09:54
ahah Merci je vais lire demain et tout refaire car le 1er test est moche
#129
R2D21995
-
- Membres
-
- 385 messages
Habitué
Posté 09 juillet 2017 - 01:35
De rien moi aussi je suis en train de le suivre il faut bien tout lire si tu ne veux pas avoir des surprises.
Il faut toujours viser la lune, car même en cas d’échec, on atterrit dans les étoiles
#130
Mike118
-
- Administrateur
-
- 10â¯310 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 09 juillet 2017 - 01:42
Hésite pas à poser tes questions sur le logiciel dans le sujet dédié. Sujet sur anykode marilou
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#131
Telson
-

- Membres
-
- 975 messages
Membre passionné
- Gender:Male
- Location:Punaauai - Tahiti
Posté 09 juillet 2017 - 11:56
Après installation du logiciel vous pouvez utiliser des examples et visualiser le code.....C'est ultra pratique ..........
#132
yougo
-
- Membres
-
- 235 messages
Membre occasionnel
Posté 10 juillet 2017 - 12:09
je tiens a vous remercier, les simulations sont en fait super pratiques , même pour un non initié , je le conseille vraiment, ca nous a permit de voir qu'il fallait raccourcir une une partie de 10Cm pour que les servos tiennent en place !
#133
yougo
-
- Membres
-
- 235 messages
Membre occasionnel
Posté 10 juillet 2017 - 01:17
Et aussi grâce aux simulations, je peux dire que les servomoteurs ASME-03A sont largement suffisants pour ce genre de projet (bipède +- 1M)
Pour tester de vous même il faut :
-une pièce avec un pois de 500g (je met toujours 100 de plus pour être sur )
-Le max torque du servo est à 260Kg/cm, soit 25.4 n/m (pareil j'ai arrondi à 25 dans le doute)
-le max speed est à 0.12s/60°, soit 500°/s
pour le reste j'ai laissé avec les paramètres normaux, car ce n'est pas indiqué sur la fiche technique 
#134
Forthman
-

- Membres
-
- 1â¯487 messages
Membre chevronné
- Gender:Not Telling
- Location:Montauban (82)
Posté 10 juillet 2017 - 01:23
Hello,
Comme je suis votre projet, je me pose des questions, alors je vous en fait part
- pour que le robot ne tombe pas en levant une patte, vous avez opté pour un contre-poids interne ou un déhanchement ? ou autre chose ?
- vous allez utiliser l'IA pour qu'il apprenne à marcher tout seul ? si oui, comment allez vous gérer la chute (vu qu'il ne va pas
pouvoir se relever tout seul) des sortes de roulettes comme sur les vélos des petits ?
Oui, je suis curieux
#135
yougo
-
- Membres
-
- 235 messages
Membre occasionnel
Posté 10 juillet 2017 - 02:29
j’attends ce genre de questions ça me fait super plaisir en fait !
en fait le but est bel est bien qu'il tombe quand il lève une patte... et oui c'est contre-intuitif mais c'est comme ça que les vrais animaux marchent (nous y compris)
On appelle ça la marche dynamique, il y a un sujet ici http://www.robot-maker.com/forum/topic/3577-marche-statique-vs-marche-dynamique/ ou Leon explique bien ça 
donc le but est qu'il tombe en avant a chaque pas et puisse se rattraper. Le soucis un peut plus dur , c'est pour qu'il ne tombe pas sur le coté, c'est pour ca que le robot est doté d'une hanche , qui lui permet un grand degrés de liberté, mais surtout de garder le centre G au dessus du seul point d’appui qui lui reste quand il lève une jambe.
Pour l'IA, on va prendre du temps a faire un algo d'évolution génétique couplé a un réseau de neurones oui , mais on aura sans doute pas le temps pour la robot race donc on prévoit aussi de coder tout en mode brut avant.
Pour les chutes on prépare un portique qui roule, mais l'algo d'évolution génétique n'est pas testé dans son corps mais dans une simulation pour ne pas prendre de risques avec le vrai robot, on pourra transférer l'IA ensuite quand elle tombera le moins fréquemment possible.
Dans tous les cas la partie IA qui apprend "toute seule" est longue à faire et on veut pouvoir mesurer le robot très précisément avant de la lancer car si on fait une simulation dans un corps approximatif en simulation, quand on va transférer dans le vrai robot il y aura des problèmes ...
Voila, je pense faire un vidéo pour répondre a des questions fréquentes comme ça donc n’hésitez pas
#136
Forthman
-
- Membres
-
- 1â¯487 messages
Membre chevronné
- Gender:Not Telling
- Location:Montauban (82)
Posté 10 juillet 2017 - 10:22
je faisais le con toute à l'heure en marchant et en réfléchissant à mes mouvements (chez moi, pas dans la rue, faut pas déconner quand-même )
et je me disais qu'il était aussi possible de déplacer artificiellement son centre de gravité en donnant une impulsion sur la jambe que l'on va lever...
Par contre, petite remarque sur la puissance des motorisations : Ne faudrait-il pas prévoir le double de la puissance nécessaire ?
Je m'explique :
Nous-même sommes capables de soulever deux fois notre propre poids (au moins), donc on peut dire que nous fonctionnons à 50% de notre capacité en temps normal...
Et si la marche de votre robot consiste en des chutes successives, ça veux dire aussi que l'effort sur la partie mécanique et moteur est bien plus importante à l'impact que
le simple maintien...
Et... la vitesse aussi va jouer un rôle important, quand on trébuche, même si on ne se rattrape pas à tous les coups, nos mouvement sont bien plus vis qu'à la normale...
Bon j'arrête mes réflexions à la con du soir
#137
yougo
-
- Membres
-
- 235 messages
Membre occasionnel
Posté 11 juillet 2017 - 11:20
Salut, malheureusement on a pas le budget de faire le robot avec 50% de sa puissance en reste...On est plus sur du 8%
(cette valeur est pour le servo qui reçoit le plus de contraintes,celui qui est directement connecté au tube, le dernier quoi. De plus cette valeur calculée dans des situations extrêmes, c'est a dire si tout le pois du robot se retrouvais sur ce servo à lui seul.)
Pour les contraintes tu as raison, c'est pourquoi tu peux voir qu'au niveau de l'articulation du genou, il y a une sorte de plaque qui ressort, elle a en fait pour but d'absorbé la puissance du choc tel un ressort.
Niveau vitesse les servos sont sur du 500° pour 1 seconde soit 0.18 secondes pour 90°, je suppose que c'est assez mais je ne sais pas vraiment en comparaison la vitesse angulaire du genou chez l'homme.
#138
Oracid
-

- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 11 juillet 2017 - 12:50
-Le max torque du servo est à 260Kg/cm, soit 25.4 n/m (pareil j'ai arrondi à 25 dans le doute)
Donc, tu pars sur du 24V ?!
Attention, à acheter sur eBay, c'est le même vendeur, mais c'est moins cher et il n'y a pas de frais de port, http://www.ebay.fr/itm/ASME-03A-High-power-high-torque-servo-the-12V-24V-260kg-cm-0-12s-60-Degree-/302378842456?hash=item46672ef958:g:bvQAAOSw~bFWPKfi
Je pense que Banggood doit prendre une marge plus importante.
En règle générale, toujours vérifier le prix sur eBay.
- R1D1 aime ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#139
Leon
-

- Membres
-
- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 14 juillet 2017 - 07:00
Je compte 6 articulations par jambe, si je ne me trompe pas.
Vu que vous êtes à budget serré, ne pourriez-vous pas faire l'économie d'1 articulation sur chaque jambe?
Notamment, je ne comprends pas l'intérêt de la "double hanche". C'est comme si ce robot avait un fémur séparé en 2.
Il semble y avoir 2 articulations par jambe qui font à peu près la même chose : basculer la jambe d'avant en arrière selon un axe horizontal latéral.
Peux-tu stp nous expliquer l'intérêt de la chose?
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
#140
yougo
-
- Membres
-
- 235 messages
Membre occasionnel
Posté 14 juillet 2017 - 09:40
Oracid , oui le servo est le asme-03A donc 24V et j'ai acheté exactement à ce lien la  j’espère juste que le délai n'est pas si long ...
j’espère juste que le délai n'est pas si long ...
il y a 5 articulations par jambes en fait , seulement 2 pour la hanche,je ne vois pas trop ou tu vois une double hanche, mais c'est vraiment dur a expliquer de façon écrite ... j'ai fait une mini présentation pour l’apéro-bot Toulouse , j'en parle normalement et on a filmé donc je vais essayer de le mettre par ici.
dans une ancienne vidéo que je fais sur blender on voyait bien que les 2 articulations permettent une très grand liberté de mouvement
https://www.youtube....h?v=UgbziD1ECw0
pour ce qui est des deux articulations, elles ne font pas du tout la même chose, je m'explique :
le premier servo en partant du haut , fait bien ce que tu dis "basculer la jambe d'avant en arrière selon un axe horizontal latéral."
petit schéma en vue latérale :
-en rouge = servo
-blanc = articulation libre
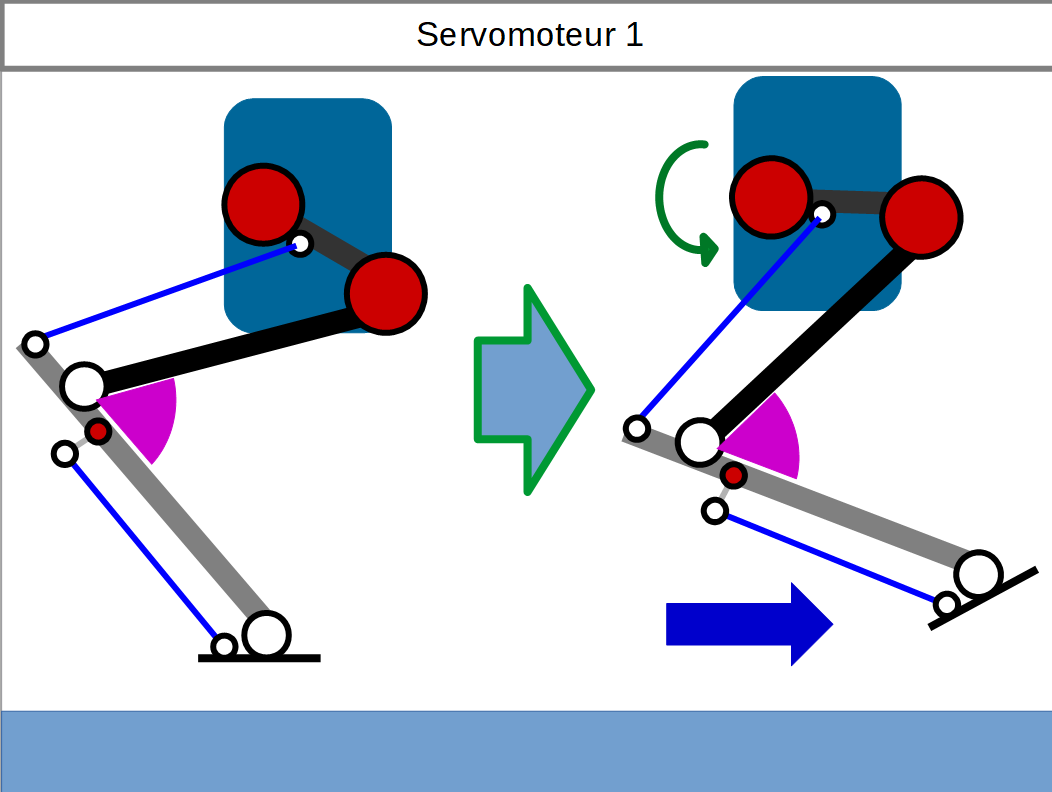
mais le second, et c'est la qu'est toute l'astuce de cette structure ne fait pas du tout la même chose, en fait si on l'actionne, par effet levier (grâces aux tiges bleu qui ne se déforment pas) on va réussir à lever la jambe , et donc le mouvement qu'engendre ce servo est en fait un élèvement VERTICAL du pied comme ceci :
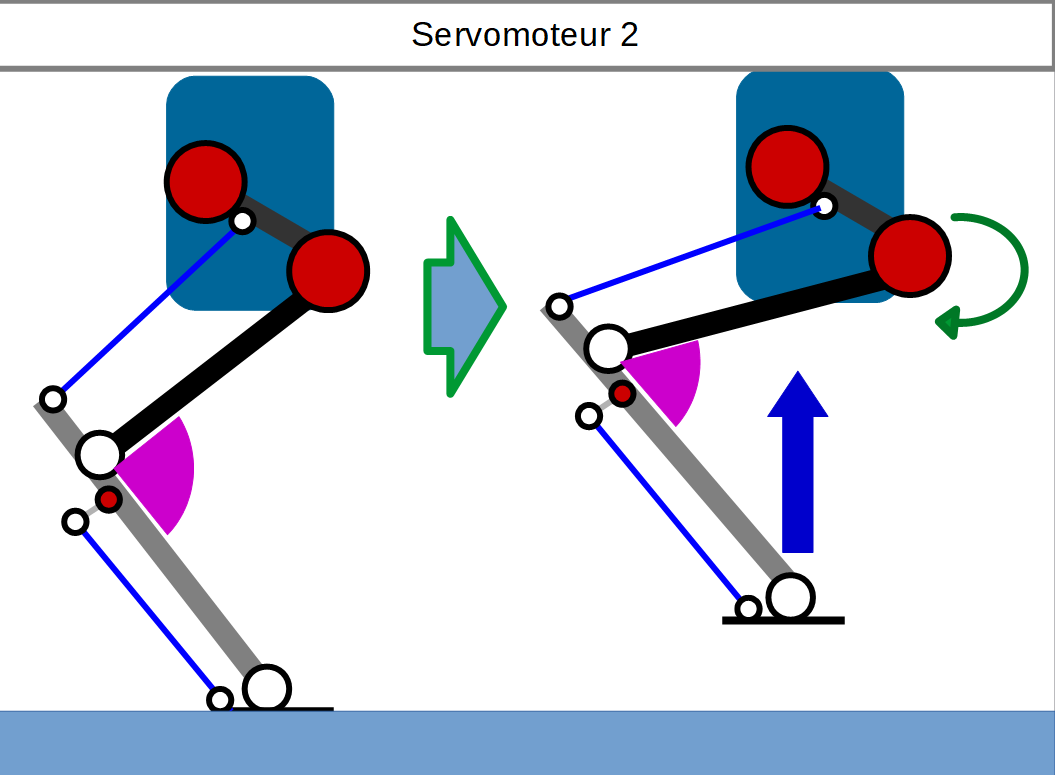
donc avec 2 servos on peut placer la jambe comme on veut sur ce plan et ça a en plus plein d'avantages








Aussi étiqueté avec au moins un de ces mots-clés : Crowfunging, financement participatif, Robot bipède
Projets et réalisations, robots et machines en tout genre →
Robots à pattes et jambes, humanoïdes, bipèdes, quadrupèdes, hexapodes ... →
Fabriquer son premier bipède (pièges et astuces)Débuté par Amhnemus, 07 avril 2018 |
|
|
1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




