
Super, merci!
Du coup, ça devient beaucoup plus simple!

Membre chevronné

Posté 26 mars 2020 - 10:47
Super, merci!
Du coup, ça devient beaucoup plus simple!
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
Membre passionné

Posté 26 mars 2020 - 10:58
J'avoue mes connaissances en calcul statique sont tellement loin que j'ai honte de ne plus savoir comment faire 
Bref, d'après ce que j'ai calculé, l'effort contre la paroi ne serait dû qu'à la seule composante de l'effort du ressort selon l'axe x (ce qui m'étonne car la logique voudrait que ce soit la composante en y !).
à corriger donc ...

Membre chevronné
Posté 26 mars 2020 - 11:46
Je penses que l'erreur vient du fait que tu ignore complètement la barre rouge du haut (celle du bas, je pense qu'on peut effectivement l'ignorer). Hors, celle-ci contraint le mouvement de A, par conséquent, elle exerce des forces de réaction (comme pour un objet posé par terre).
Pour ma part, j'ai essayé avec un calcul de moment autour du bout à droite de la barre du haut. J'ai obtenu un résultat légèrement différent : Force_perpendiculaire_à_la_paroi = Fr * sin (alpha - beta) * cos (alpha), où mon beta est ton alpha, et mon alpha est l'angle le plus petit du parallélogramme. Du coup, alpha-beta est l'angle entre le trait vert et le trait rouge du haut.
J'essaye de mettre ça un peu au propre et je refais un post avec mes calculs et un schéma
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
Membre chevronné
Posté 27 mars 2020 - 12:25
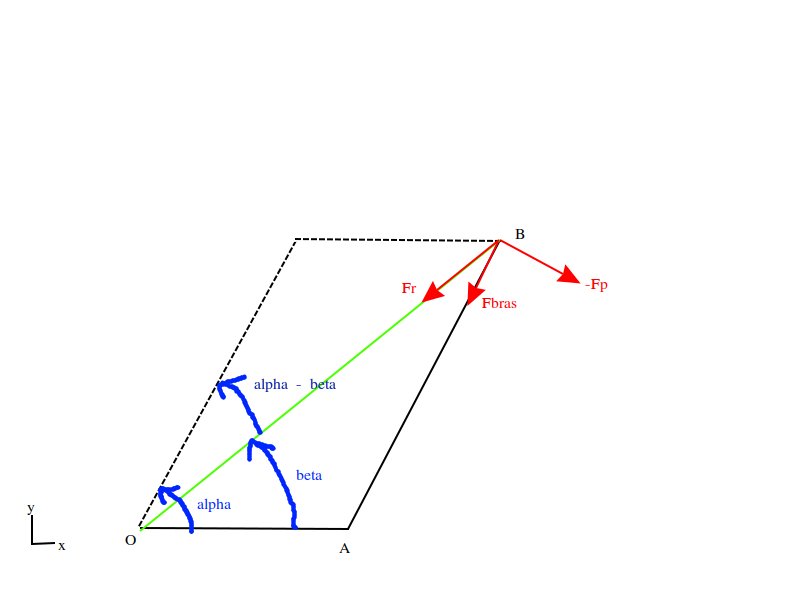
Notations :
sauf dans le schéma, j'écrirais vect(AB) pour le vecteur AB, et AB pour la longueur AB (positive)
La roue étant en translation pure par rapport à la barre du haut, elle exerce sur la paroi la même force que celle exercée par le point B sur l'ensemble roue+support. Je me contenante donc d'étudier la force vect(Fp), la force avec laquelle le bras "pousse" le support de la roue (et donc la force avec laquelle la roue pousse sur la paroi).
Vu que c'est le bras AB qui pousse, je pars sur l'hypothèse que la force vect(Fp) est perpendiculaire à vect(AB), et orienté vers la gauche.
Pour la suite, je m'intéresse au point B, dans le but de faire un moment des forces autour de l'axe passant par A et sortant de l'écran.
3 forces s'exercent sur B :
- vect(Fr) : la force exercée par le ressort
- vect(Fbras), la force de réaction du bras (qui empèche B de s'approcher de A). Cette force est parallèle à vect(AB), et du coup disparaitra dans le calcul du moment.
- vect(- Fp) : la force exercée par le support de la roue sur le point B. NB : on notera le signe "moins" devant Fp, qui est du que l'on considère la poussée par le support de roue sur B et plus l'inverse
Le moment total des forces execrées sur B, autour du point A est :
Vect(M) = vect(AB) ^ (vect(Fr) + vect(Fbras) + vect( -Fp)) = vect(AB) ^ vect(Fr) + vect(AB) ^ vect( -Fp)
En projetant sur l'axe z :
M = AB* (cos(alpha), sin(alpha) ) ^ - Fr (cos(beta), sin(beta)) + AB * (-Fp) //car AB et Fp sont perpendiculaires
= AB * Fr * [ sin(alpha)*cos(beta) - cos(alpha)*sin(beta)] - AB*Fp
= AB * Fr * sin(alpha-beta) - AB*Fp
En supposant qu'on est en statique, on a M=0 (sinon il y aurait une accélération angulaire).
Du coup, on a :
0 = M = AB * Fr * sin(alpha-beta) - AB*Fp
Fr * sin(alpha-beta)= Fp
Si maintenant on veut la force perpendiculaire à la paroi, il s'agit de F_ortho=Fp*cos(alpha) = Fr * sin(alpha-beta) * cos(alpha)
Ceci si je n'ai fait aucune erreur!
Après, pour obtenir quelque chose de vraiment exploitable, il faudrait pouvoir tout exprimer en fonction d'un unique paramètre (alpha), et de constantes facilement mesurables (constante de raideur et longueur au repos du ressort, longueur des cotés du parallélogramme), ce qui n'est pas difficile dans l'absolu (un peu de théorème d'al-kashi et de la trigo), mais le résultat risque d'être très moche
EDIT : j'ai trouvé comment éliminer le sin(alpha-beta).
D'après la "loi des sinus", dans un triangle, les ratios longueur_coté/sinus_de_l_angle_opposé sont tous égaux.
Si on note L0+dL la longeur du ressort (L0 étant la longueur au repos, dL l’allongement), alors on a : a/sin(alpha-beta) = (L0+dL)/(sin(pi-alpha), d'où sin(alpha-beta)=a*sin(alpha) / (L0+dL)
De plus, Fr=k*dL (k:constante de raideur, dL:allongement)
Du coup, F_ortho=Fp*cos(alpha) = Fr * sin(alpha-beta) * cos(alpha) = k * dL * [ a*sin(alpha) / (L0+dL) ] * sin(alpha) = k * [dL/(L0+dL) ] * cos(alpha)*sin(alpha) = 0.5 * k * [dL/(L0+dL) ] * sin(2*alpha)
Le résultat a le mérite d'être au moins juste pour alpha=0, pi/2 et pi, où la force orthogonale à la paroi est nulle.
Reste plus qu'à relier dL et alpha. La version moche est al-kashi : (L0+dL)²=a² + b² -2*a*b*cos(pi-alpha), donc dL = sqrt( a² + b² + 2*a*b*cos(alpha) ) -L0
Du coup, on obtient :
F_otho=0.5* k * (L0+dl - L0)/(L0+dl)* sin(2*alpha)
F_otho=0.5* k * [1- L0/(L0+dl) ]* sin(2*alpha)
F_otho=0.5* k * [1- L0/sqrt( a² + b² + 2*a*b*cos(alpha) ) ]* sin(2*alpha)
C'est moche, mais on n'a plus qu'une seule variable, alpha.
EDIT : correction d'une petite erreur au niveau du théorème d'al-kashi (l'angle était pi-alpha et pas alpha)
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
Membre passionné
Posté 27 mars 2020 - 08:46
Membre passionné
Posté 27 mars 2020 - 09:14

Membre chevronné
Posté 27 mars 2020 - 10:22
Merci,
mais il y a au moins une erreur :
Juste sous le dessin de parallélogramme, tu écris AC²+BD² = 2 AC², ce qui est incorrect : pour un parallélogramme quelconque, les diagonales n'ont pas la même longueur (prends ta règle pour vérifier si tu veux).
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
Membre chevronné
Posté 27 mars 2020 - 10:30
Après, je commence à bien croire à la solution, vu que ça correspondrait au raisonnement "qualitatif" suivant (je vais me référer au schéma du post #64):
- la seule force "utile" est la composante perpendiculaire à AB. Du coup, on projette Fr sur l'orthogonale à AB, soit Fr*sin(angle_entre_OB_et_AB), ie Fr*sin(alpha-beta)
- vu que cette force est appliquée en B, et qu'on s'intéresse à la force en B, il n'y a pas de bras de levier, du coup, on exerce une force égale à Fr*sin(alpha-beta) sur la paroi
- cette force fait un angle alpha à la perpendiculaire de la paroi, du coup la composante perpendiculaire à la paroi est FR*sin(alpha-beta)*cos(alpha).
NB : à prendre avec un peu de méfiance quand même, je suis peut-être tombé dans le biais de confirmation
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
Membre passionné
Posté 27 mars 2020 - 11:17
" Juste sous le dessin de parallélogramme, tu écris AC²+BD² = 2 AC², ce qui est incorrect " !
Zut alors ! j'ai été trop vite ! bref en corrigeant, le raisonnement devrait toujours tenir.
Membre chevronné
Posté 27 mars 2020 - 11:43
Une autre question : comment, à droite, dans la 3ième section, tu déduis que RAy=0? (surtout qu'à priori, j'aurais tendance à dire qu'il y a aussi une force tangentielle à la paroi (opposé au frottement)
EDIT :
et avec ma formule, un petit graphe :
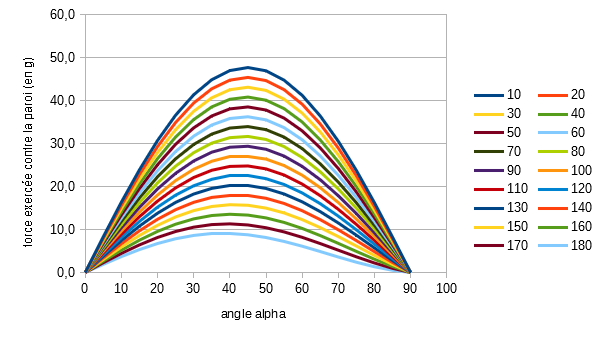
J'ai pris un petit coté du parallélogramme de 50mm, et 180mm pour le grand.
L'axe vertical représente la force exercée (en grammes force). A noté que ce n'est pas à l'échelle, j'ai pris au hasard une raideur k=1 N/mm. Pour d'autres raideurs, c'est proportionnel
L'axe horizontal est mon angle alpha (ie le petit angle du parallélogramme).
En légende, c'est les différentes valeurs de L0 (longueur de repos du ressort), en mm. A noté que les valeurs de L0 inférieures à 80 me semblent peu réalisables (le ressort triple de longueur ou plus)
Pour alpha dans l'intervalle 15 à 75°, la force exercée contre la paroi perpendiculairement varie d'un facteur 2 à 2.3 (selon L0)
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
Membre passionné
Posté 27 mars 2020 - 12:06
J'ai simplifier pour Ray ! sinon faut se tartiner d'avantages de calcul pour prendre en compte cet effort tangentiel.
Un site merveilleux pour avoir toutes les formules sur des figures géométrique :
http://villemin.gerard.free.fr/Wwwgvmm/Geometri/QuadParF.htm
En tout cas dan les calculs, ils faut imposer certaine distance pour récupérer la valeur des angles (la longueur f dans mon schéma qui représente l'écartement du bras = plus où moins la moitié de la distance entre 2 parois).
Avec ça, tu récupère la longueur de la diagonale en fonction de l'angle avec le ressort (têta pour changer).
Membre passionné
Posté 27 mars 2020 - 12:12
.
Membre chevronné
Posté 27 mars 2020 - 12:36
Euh ... pour faire disparaitre le RAy, je ne vois pas qu'est-ce qui t'y autorise (il n'est pas négligeable à priori, et il devrait se retrouver dans la valeur de RCy que tu continue à utiliser).
Après, je commence à me demander de plus en plus ce qu'apporte vraiment le parallélogramme :
- pour la force exercée, c'est exactement la même que si j'avais un simple bras
- l'orientation de la force reste aussi la même (donc quand l'écart entre les parois est grand, on continue à ne pas avoir beaucoup de force)
Bref, un bras avec un ressort donnerait le même résultat que le parallélogramme.
La seule "différence", c'est de permettre de décaler la roue vers la paroi, d'une distance d, de manière à réduire le risque de collision entre le bras et la paroi.
Mais est-ce vraiment utile?
- quand le bras est bien écarté, l'orientation du bras fait qu'il n'y a quasiment pas de risque de collision
- quand le bras est peu écarté, la situation est plus intéressante :
1) avec un parallélogramme, avec une roue décalé d'une distance d, on a un peu moins de risque de collision. En revanche, le parallélogramme est beaucoup plus plaqué contre la base du robot, du coup n'a presque plus de forces (la force tend vers 0 quand on plaque le bras/parallélogramme contre la base du robot). De plus, on augmente la distance minimale entre les deux parois de 2*d par rapport à un simple bras
2) avec un bras, l'angle entre le bras et la base du robot est bien plus grand, du coup on a plus de force. De plus, cet angle plus grand contribue à écarter un peu le bras de l'obstacle.
En gros, on a le choix entre ne pas passer les passages trop étroits (car trop large, ou que ça passe de justesse mais pas assez de force), ou de risquer les collisions dans les passages peu larges s'il y a des obstacles (du coup on peut passer un passage étroit lisse, mais pas s'il tourne trop par exemple).
Du coup, j'aurais tendance à dire qu'il vaut mieux pouvoir passer certains passages étroits plutôt qu'aucun (sachant que pour les larges, la question ne se pose plus)
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
Membre passionné
Posté 27 mars 2020 - 02:41
Le parallélogramme apporte plusieurs avantages non négligeable :
- permettre une meilleur performance en franchissement.
- permettre au dernier bras raccordé aux roues d'être constamment normale à la paroi = si les roues sont rotative pour permettre au robot de tourner, c'est plus pratique d'avoir l'axe de rotation toujours normale à la paroi !
Un système avec des bras simple est pour moi bien trop simpliste et peu efficace :
- risque de collision accru des bras avec les paroi.
- comment on fait pour diriger le robot sur les paroi ? la solution simpliste de faire tourner plus vite les roues d'un côté est purement à exclure étant donné que cela d'une part abîmer les roues mais d'autre par faire diminuer drastiquement le coefficient de frottement entre les roues et les parois ce qui à terme risquera de faire chuter le robot et là adieux robot !
Si tu as peur que le ressort en diagonale ne permette pas d'avoir suffisamment de pression en cas de rétrécissement du passage, rien ne t'interdit de mettre les ressort autre part, ça ne change pas le concept !
Bref, fais toi des maquettes rudimentaires et test la meilleur solution.
Skyhack.
Membre chevronné
Posté 27 mars 2020 - 03:25
- permettre une meilleur performance en franchissement.
Meilleurs franchissement de bosses, mais impossibilité de passage dans des endroits très étroits
- permettre au dernier bras raccordé aux roues d'être constamment normale à la paroi = si les roues sont rotative pour permettre au robot de tourner, c'est plus pratique d'avoir l'axe de rotation toujours normale à la paroi !
là d'accord. Par contre, j'ai des doutes sur la possibilité de faire ce système de roues qui peuvent changer d'axe : j'ai peur que ça fasse juste trop large (on a la largeur du parallélogramme seul, qui est à peu près équivalente au bras, mais dans le cas du parallélogramme, il faut alors ajouter la hauteur du servo + la longueur du moteur à deux sorties + le rayon de la roue. Du coup, je pense qu'on est à au moins 5+3+3 + 2.5 =13.5cm par côté, du coup, si on inclus 1cm pour le milieu, ça nous fait 28cm de large.
Et à 28cm de large (selon la forme), je passe moi même, du coup plus besoin de robot.
- risque de collision accru des bras avec les paroi.
Un peu, en effet. Mais entre ça et une largeur min plus importante, je suis pas sur qu'on gagne au change (surtout que la collision d'un bras n'est pas grave, il faut juste que ce ne soit pas trop de bras en même temps).
- comment on fait pour diriger le robot sur les paroi ? la solution simpliste de faire tourner plus vite les roues d'un côté est purement à exclure étant donné que cela d'une part abîmer les roues mais d'autre par faire diminuer drastiquement le coefficient de frottement entre les roues et les parois ce qui à terme risquera de faire chuter le robot et là adieux robot !
Tu pourrais développer un peu? Car c'est exactement ce que j'avais prévu!
Pourquoi ça abimerait tant que ça les roues? (sachant qu'en pratique, le robot ferra probablement pas plus que 50m (25 aller, 25 retour) avant de revenir à l'opérateur (qui pourra contrôler les roues).
Et pourquoi est-ce que ça diminuerait l'adhérence?
Si tu as peur que le ressort en diagonale ne permette pas d'avoir suffisamment de pression en cas de rétrécissement du passage, rien ne t'interdit de mettre les ressort autre part, ça ne change pas le concept !
Pour le cas du bras, je pensais ajouter une petite barre qui améliore l'angle de traction au tout début, et qui serait placé dans les parties qui partent à gauche et à droite du robot (que j'ai prévu pour ça).
Il y aurait probablement moyen de faire la même chose pour un parallélogramme, à condition d'aller vers un élastique plutôt que vers un ressort (et du coup probablement devoir tendre avec des moteurs)
Bref, fais toi des maquettes rudimentaires et test la meilleur solution.
Pas si facile, vu que ce qui me limite sur la version parallélogramme + servo orientant les roues n'est pas le principe en lui-même (qui dans l'absolut est clairement mieux que le bras), mais le fait que je ne pense pas être capable de le miniaturiser autant que le bras (alors que d'avoir une largeur min aussi petite que possible est l'élément le plus important pour l'utilité après bien sur le fait que ce soit utilisable).
Si le but avait été de faire la même chose pour des passages larges de 50cm à 1m de large, alors le parallélogramme aurait clairement été mieux.
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
Membre passionné
Posté 27 mars 2020 - 04:25
Membre chevronné
Posté 27 mars 2020 - 06:31
J'en reviens à mon idée première : une vulgaire perche + camera !
C'est déjà fait (même s'il reste des améliorations à faire). Perche en tronçons de tuyau PVC de 40mm de diamètre et 1m de long. Au bout, une caméra, un capteur de distance et un IMU, le tout monté sur un servo; ainsi que des LEDs et un arduino nano. Le tout relié à un raspi qui crée un réseau wifi local et héberge un mini-site internet pour interagir avec le robot (commande des LEDs et du moteur, retour vidéo, distance et orientation).*
Ce qu'il m'y reste à faire, c'est changer les LEDs pour des plus puissantes, changer le capteur de distance pour un autre qui résiste mieux à l'eau, et imperméabiliser autant que possible le reste
Sinon, pour revenir à la version robotisée : j'ai été faire quelques tests de coincement du robot dans des fissures d'une petite falaise juste à coté de chez moi.
Si vous voulez voir toutes les photos, je les ai mises sur un drive, pour éviter de surcharger le forum : https://drive.google...2ZA?usp=sharing
En voici une petite sélection :





Globalement, ça marche pas trop mal.
J'en ai aussi profité pour tirer quelques enseignements :
- les roues ne tiennent pas assez bien sur les moteurs (elles sont prévues pour être juste maintenues par serrage, c'est pas suffisent). Mais ça, je m'en doutais déjà
- le coin du cube des moteurs des roues a buté à plusieurs reprises contre la paroi : je pense que je vais voir pour des doubles roues, ou au moins à enlever un peu de matière inutile
- le bras n'a touché qu'à une seule reprise (cf les deux dernières photos, le bras au fond à gauche en bas), dans une situation où je ne suis pas sur si un parallélogramme aurait changé quelque chose. Ca n'a pas empêché le robot de tenir.
- l'adhérence des roues, je dirais moyens. Mais bon, le test n'a qu'une valeur limitée, vu qu'il s'agissait de grès sec et pas de calcaire humide
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
Pilier du forum

Posté 27 mars 2020 - 07:34
Je suis vraiment très impressionné par ta réalisation.
Je suis depuis longtemps un fan du parallélogramme, il n'y a qu'à voir mes réalisations et même la première page de ma présentation, https://www.robot-ma...oracid/?p=20835
Néanmoins, ici, j'ai peur que cela prenne beaucoup de place, mais cela vaut vraiment la peine d'étudier la question.
Mais avant, n'y aurait-il pas une autre solution à étudier ? Par exemple, faire des bras en arc de cercle. Cela éviterait peut-être de toucher les pierres qui dépassent.
Ces bras courbes pourraient éventuellement se croiser à l'avant et à l'arrière, s'il ne sont pas sur le même plan.
Pour les blocs moteurs, je pense qu'il faudrait arrondir les angles, et utiliser des axes traversants avec une roue de chaque coté.
De cette façon, je ne pense pas que tes roues soit trop petites. Ou alors, prendre juste la taille au dessus, mais cela te coutera cher en terme de puissance.
Pour moi, il faut d'abord faire ce type d'amélioration avant de grossir les roues, les moteurs, le volume…………. et donc le poids qui est ton principal ennemi.
Bravo.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Membre chevronné
Posté 27 mars 2020 - 09:21
Merci.
Pour la forme des bras, j'y avais songé à un moment dans l'autre sens (faire un angle pour réduire la largeur minimal de galerie nécessaire), mais ça augmentait le risque de collision.
Pour faire l'arc de cercle dans le sens qui réduit les collisions (ie centre du cercle coté paroi), j'ai le problème que ça augmente la largeur minimale de galerie (car les bras viennent butter sur les moteurs/bobines) lorsque le robot essaye de passer la largeur minimale. Après, il reste quand même un peu de liberté après le point de butée : je pourrais ainsi faire des bras qui commencent droit, puis se poursuivent avec un arc de cercle (un peu comme une faucille) : ça n'augmentera pas la largeur min, mais ça réduira un petit peu le risque de collisions.
Pour le croisement des bras, je ne suis pas sur d'avoir bien compris : tu parles des bras avant haut qui se croiseraient, ou des bras haut gauche?
Arrondir les angles, ça ne fera certainement pas de mal, de toute façon ces supports moteurs sont beaucoup trop solides.
Pour les axes traversants, il faut que je cherche. Les GA12-N20 étaient quasi parfait (60rpm, 2kg.cm en nominal, stall torque à 16kgcm, et à peine 10g).
Pour le diamètre des roues, avec mes moteurs, j'ai un peu de marge (pour l'instant j'ai des roues de 5.5cm de diamètre, avec 8cm de diamètre il faudrait 4 roues sur 8 au couple nominal pour soulever le poids du robot). Mais une plus grosse roue, c'est aussi une largeur minimale augmentée.
Sinon, on ne perd pas de puissance en augmentant la taille des roues, juste de la force (compensé par la vitesse pour donner une puissance constante). Mais en soit, à moteur donné, si on augmente trop le diamètre des roues, on finira par manquer de force. En revanche, si je change de moteur, à priori je peux prendre n'importe quel diamètre de roues, il faut juste que je choisisse le rapport de réduction de mes moteurs en conséquent.
En revanche, trouver un bon couple sur de petits motoréducteurs est pas facile, c'est plus facile de trouver plus rapide mais moins de couple, ce qui encourage à prendre de petites roues.
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.
Membre chevronné
Posté 27 mars 2020 - 11:08
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.









0 members, 0 guests, 0 anonymous users

