

Bonjour,
j'ouvre un sujet sur un petit nouveau dans la famille de mes bipèdes, créé "par la force des choses". En effet, encore une fois c'est les arts de la scène et spécifiquement la danse qui m'a permis de créer ce robot. Il s'appelle "Meta" et est un double humanoïde de 1m de haut. C'est comme deux humanoïdes, non pas l'un derrière l'autre mais l'un à côté de l'autre comme se tenant par la taille.
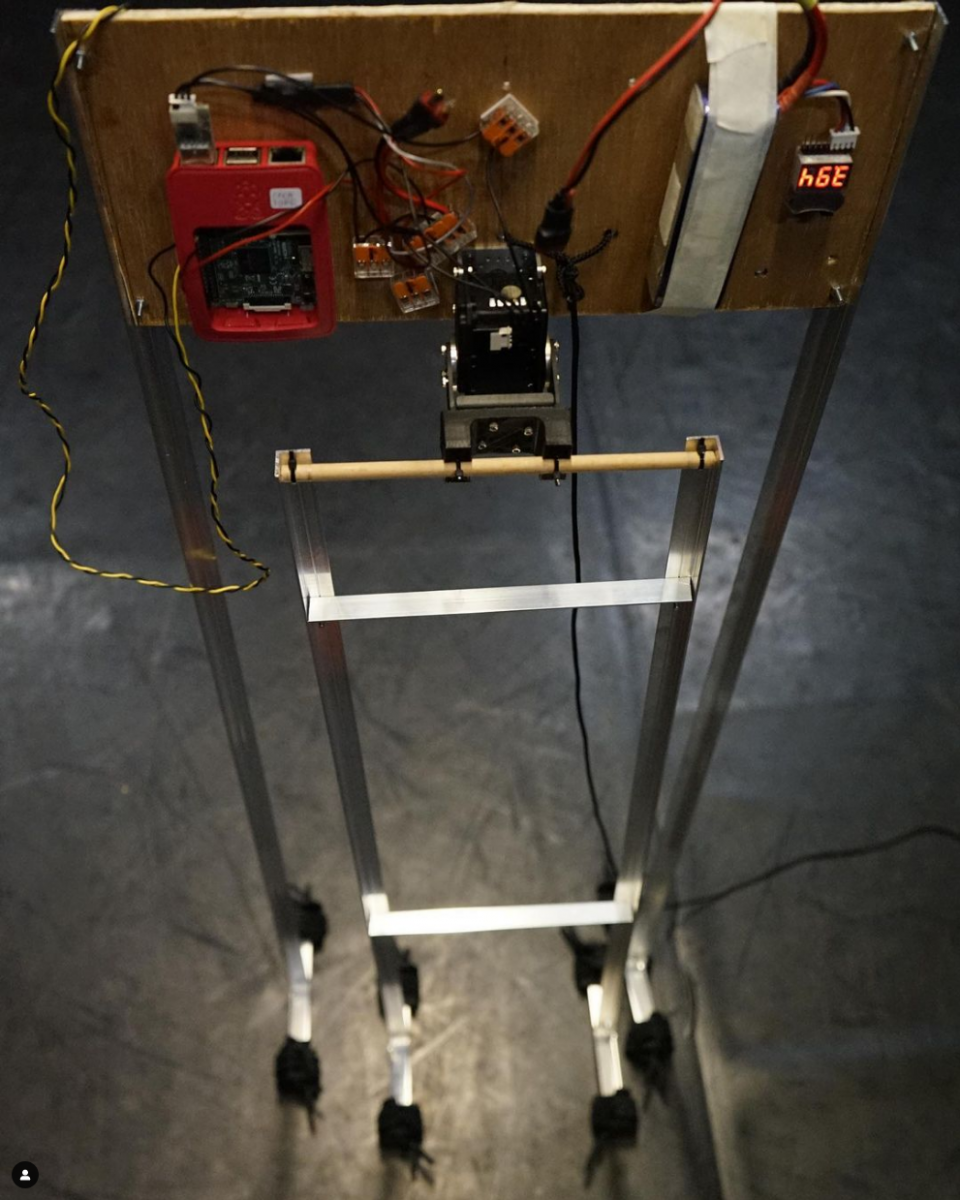
Photo de Ambre Cazier.
je continue ma réflexion sur le robot E-bunny mais le planning se bouscule... Difficile d'avancer dessus sachant que j'en suis à une étape où il me faudrait bien 2 semaines d'affilé pour le mener au bout.
Les 29 et 30 novembre, la compagnie K-Danse m'a invité sur deux jours à animer un atelier sur le plateau de la "gare des artistes" (ancien hangar de la SNCF retapé en studio de danse) avec comme thématique "Marcher comme un robot". L'atelier regroupait chorégraphes, interprètes comédiennes et danseuses, chercheuses en art appliqué et sciences du langage. J'avais organisé les deux jours en quatre moments :
-1) Marcher comme Asimo, explorer la marche semi-équilibrée (exploration par des exercices de clown et de marche lente)
-2) Marcher comme Poppy, sachant qu'il ne marche pas, pourquoi, comment générer un mouvement ?
-3) Marcher comme Meta (j'y viens)
-4) Marcher comme Atlas (comprendre par la danse l'optimisation du mouvement dans sa dynamique)
Les parties 1, 2 et 4, je les avais déjà expérimentées lors d'un atelier l'an dernier. Par contre la partie 3 était toute nouvelle et concerne la compréhension de la marche dynamique passive (lien vers "Essentials of Dynamic Walking" de Martijn Wisse). L'atelier est organisé autour de ce robot "Meta" inspiré du robot Mike (aucuns liens  ) du Delft Biorobotic Laboratory, dans lequel j'ai travaillé en stage de 6 mois.
) du Delft Biorobotic Laboratory, dans lequel j'ai travaillé en stage de 6 mois.
Le robot possède deux jambes, une jambe externe et une jambe interne. La jambe interne est suspendue à la jambe externe par un servomoteur unique qui ne prend que deux positions : la haute et la basse. En position haute, c'est la jambe extérieure qui est la plus longue, en position basse, c'est la jambe interne qui est la plus longue. Le passage d'une position à l'autre se fait avec un bouton poussoir.
Le robot n'est clairement pas un robot très évolué et bidouillé en deux week-ends après un arrêt chez Brico-marché et un dynamixel qui trainait (clairement sur-dimensionné) mais un excellent outil pour comprendre la dynamique de la marche en la touchant.
Voici une vidéo où on voit évoluer le robot sur le plateau.
Le retour des stagiaires de l'atelier montre que les termes utilisés pour décrire la marche dynamique sont très intuitifs pour le travail de corps et offre un regard autre qui permet aussi de composer. J'ai essayé de ne pas trop "édulcorer" les outils mathématiques et ça s'est plutôt bien passé.
Au passage, en cherchant d'autres robots similaires, je suis tombé sur TARS de Interstellar, robot animé comme une marionnette avec traitement en effet spéciaux juste pour enlever la manipulation.
Je vais peut-être pousser plus loin cette expérimentation.









![[En projet] Terran Task Force en 3D de 89 cm du haut avec des servomoteurs AX-12A - dernier message par Robot Urbie en légo](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-8501.jpg?_r=1636615750)






