

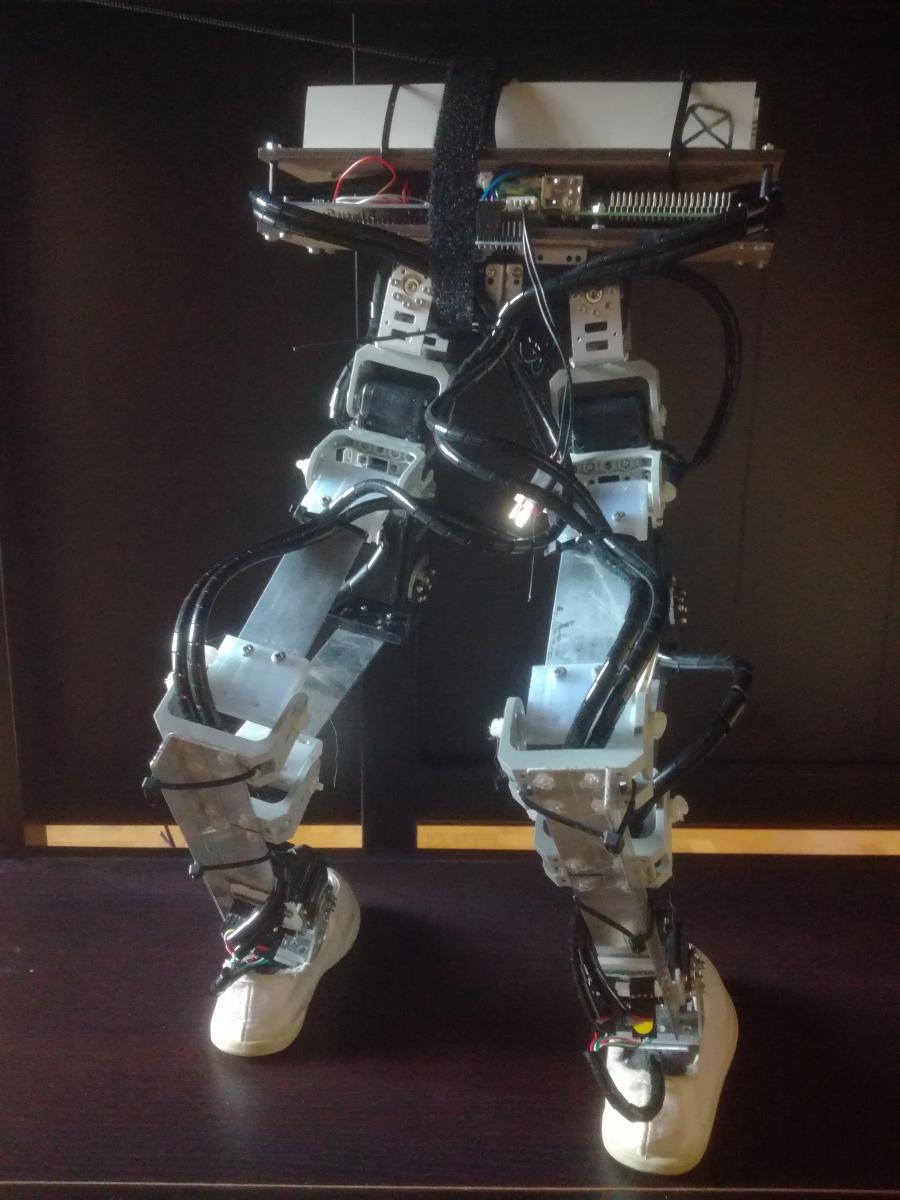
Merci pour vos retours. En effet, mon objectif est toujours de rester dans la philosophie des recherches de TU Delft, de travailler en bipédie passive. Ca signifie que quand le robot se retrouve sur un pied, c'est un pendule inversé dont il faut plus ou moins contrôler la dynamique.
L'autre point de la philosophie de ce labo est de mener une recherche parallèle entre simulation et prototype.
Le prototype montre des choses que le simulateur ne montre pas, on améliore donc le simulateur qui montre des possibilités supplémentaires qui permettent de construire un autre prototype, etc.
Concernant le simulateur que j'ai fait, il s'agit d'une feuille de calcul simple avec un robot assimilé à un point de masse ponctuelle relié au sol par deux pendules. Le décalage que je décris plus haut est en fait pas lié au fait que le pied gauche ne décolle pas quand je raccourcis la jambe gauche. En effet tout le poids est dessus donc il ne décollera pas. Mais par contre, dans le cas d'un robot avec buste ponctuel, le pied droit ne devrait pas décoller.
En regardant la vidéo un peu plus il apparait en fait qu'en pliant la jambe gauche, le haut du corps, qui a une inertie non négligeable, se met à tourner. Cette rotation du haut du corps emporte avec elle la jambe droite qui se lève. Le haut du corps perturbe donc la dynamique de la marche.
Dans la prochaine version du simulateur, j'intègrerai cette inertie du haut du corps.
Dans la première vidéo, juste après que le robot se lève, je fais un mouvement lent où je transfère le poids le plus près possible du pied gauche pour pouvoir lever le pied droit. Puis je lâche tout en laissant les dynamiques naturelles se balancer jusqu'à ce qu'il n'y ait pas assez d'énergie... chute.
Je vais donc tenter d'utiliser ce "bug" pour lever la jambe pour avancer au lieu de sagement transférer les poids. Ca va faire une démarche un peu western mais bon, si ça tombe pas...























![[En projet] Terran Task Force en 3D de 89 cm du haut avec des servomoteurs AX-12A - dernier message par Robot Urbie en légo](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-8501.jpg?_r=1636615750)

