

Impossible de trouver l'énergie de s'y remettre pendant le confinement... mais les chaleurs estivales m'ont remotivées, tant mieux !
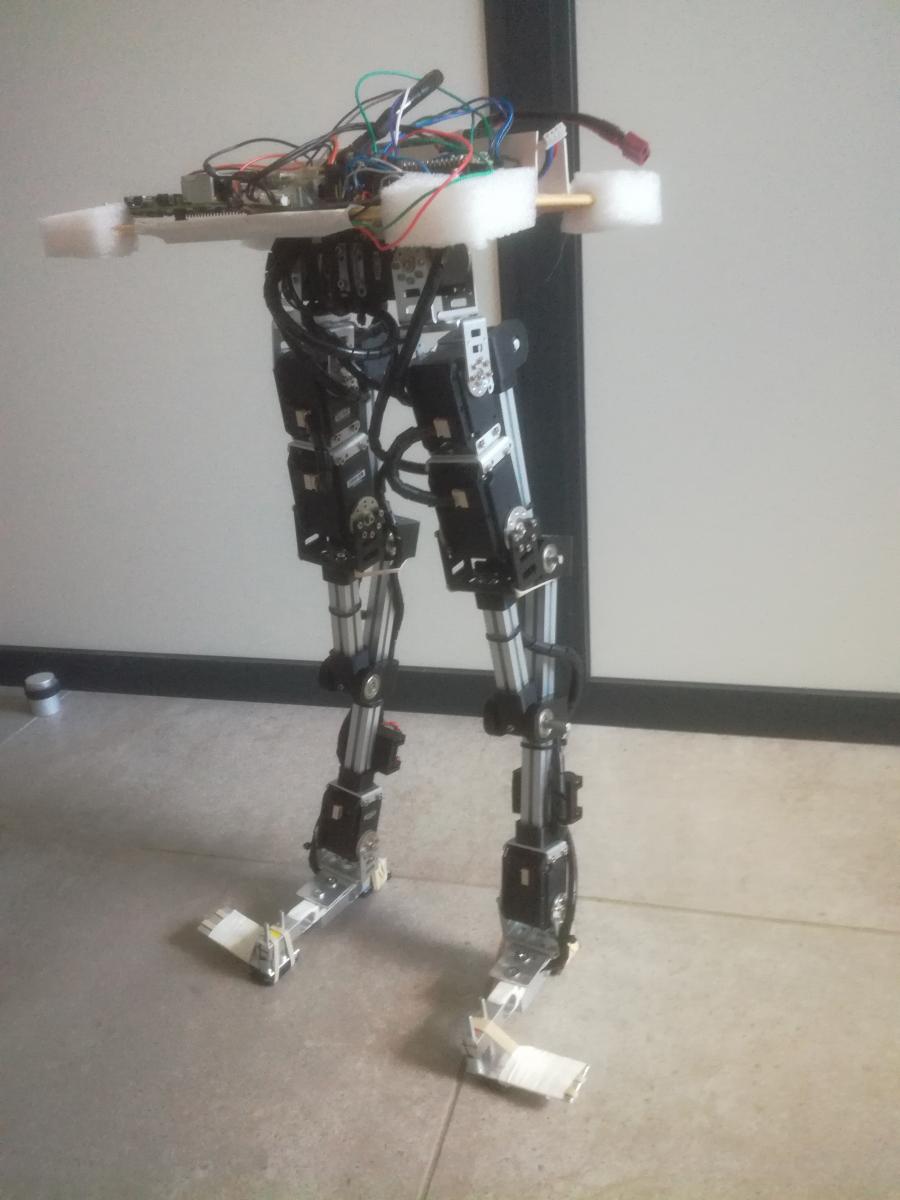
L'occasion d'upgrader e-bunny avec les capteurs d'effort sous les pieds pour une version II.
La version I avait une Raspberry Pi avec le gyroscope branché direct en I²C, les capteurs de contact sous les pieds (des switch) et le dispositif de départ (un switch ILS avec un aimant).
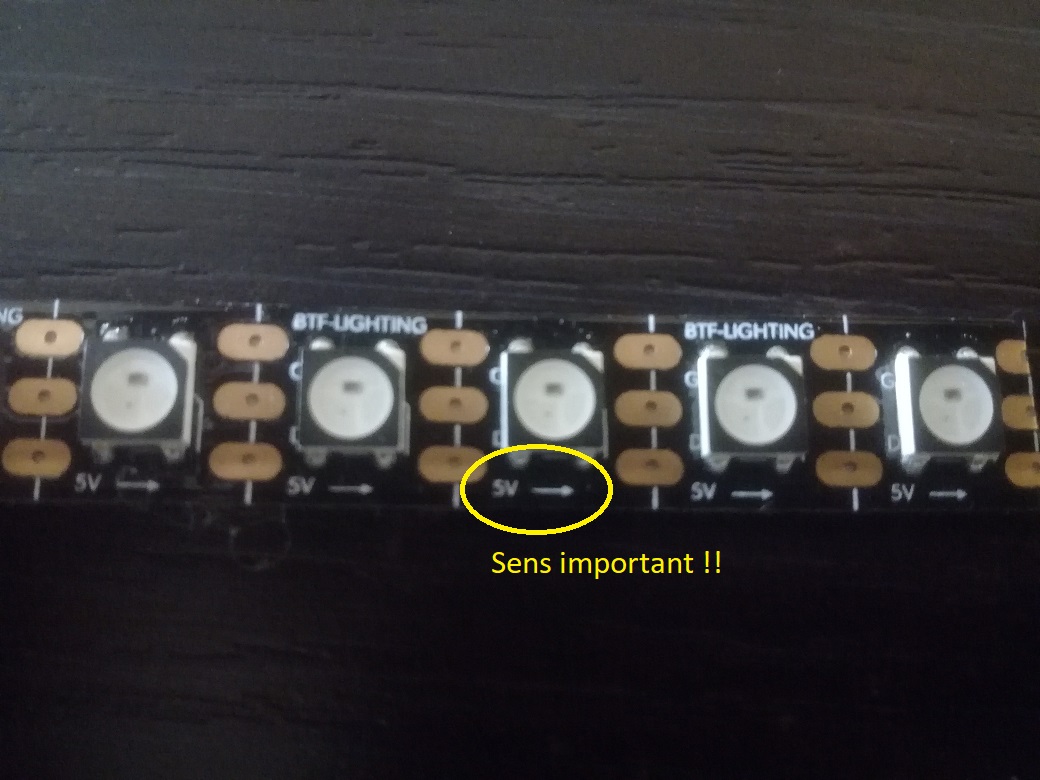
Pour cette version, j'ai décidé de reporter la partie capteurs sur une Arduino Nano every avec donc 4 capteurs d'efforts sous les pieds, le gyroscope MPU6050, le switch de départ et une sortie de contrôle de LED NeoPixel.
Le but étant de voir l'état des capteurs en un coup d'oeil via les LED NeoPixel sur le robot sans forcément utiliser le PC.
Cela permet aussi de plonger un peu plus sur la manière de travailler avec un duo Raspberry Pi/Arduino.
Voici le code de la carte capteur : https://github.com/T...on/shoeFirmware
Que je recopie dessous. J'essaie de mettre toute la doc dans le code lui-même, sans artifice. Les PINOUT d'Arduino en ASCII Art, c'est vachement pratique !!
C'est une première version en mode "voir si ça marche", reste à mettre au propre.
#include "HX711.h"
#include <MPU6050_tockn.h>
#include <Wire.h>
#include <Adafruit_NeoPixel.h>
#define NUM_LEDS 11
#define NEOPIXEL_PIN 5
/*
Description :
Ce firmware a pour rôle de récuperer les valeurs de l'ensemble des capteurs sur demande
via port série quand la lettre "A" est demandée.
La réponse est envoyée en format json.
Voici le schema électrique de la carte :
+-----+
+------------| USB |------------+
| +-----+ |
| [ ]D13 MISO/D12[ ] |
| [ ]3.3V MOSI/D11[ ]~|
| [ ]V.ref ___ SS/D10[ ]~|
RB_DOUT | [ ]A0/D14 / N \ D9[ ]~| LF_DOUT
RB_SCK | [ ]A1/D15 / A \ D8[ ] | LF_SCK
RF_DOUT | [ ]A2/D16 \ N / D7[ ] | LB_DOUT
RF_SCK | [ ]A3/D17 \_0_/ D6[ ]~| LB_SCK
MPU | [ ]A4/D18/SDA D5[ ]~| NEOPIXEL
MPU | [ ]A5/D19/SCL D4[ ] |
| [ ]A6 D3[ ]~|
| [ ]A7 D2[ ] | ILS
| [ ]5V GND[ ] |
| [ ]RST RST[ ] |
| [ ]GND RX1[ ] |
| [ ]Vin TX1[ ] |
| |
| |
| NANO EVERY |
+-------------------------------+
*/
//Description des I/O et declarations
//Lecteurs de force sous les pieds
// capteur droit avant (jaune)
const int FOOT_RF_DOUT_PIN = 16;
const int FOOT_RF_SCK_PIN = 17;
// capteur droit arrière (noir)
const int FOOT_RB_DOUT_PIN = 14;
const int FOOT_RB_SCK_PIN = 15;
// capteur gauche avant (rouge)
const int FOOT_LF_DOUT_PIN = 9;
const int FOOT_LF_SCK_PIN = 8;
// capteur gauche arrière (bleu)
const int FOOT_LB_DOUT_PIN = 7;
const int FOOT_LB_SCK_PIN = 6;
//Bouton ILS pour démarrage
const int ILS_PIN = 2;
// declaration des capteurs de force
HX711 foot_rf;
HX711 foot_rb;
HX711 foot_lf;
HX711 foot_lb;
// declaration du MPU
MPU6050 mpu6050(Wire);
Adafruit_NeoPixel pixels(NUM_LEDS, NEOPIXEL_PIN, NEO_GRB + NEO_KHZ800);
// declaration des variables
long force_rf=0;
long force_rb=0;
long force_lf=0;
long force_lb=0;
int ready_rf=0;
int ready_rb=0;
int ready_lf=0;
int ready_lb=0;
int test = 0;
void setup() {
pixels.begin();
pixels.clear();
pixels.setBrightness(50);
pixels.setPixelColor(5, pixels.Color(255, 0, 0));
pixels.show();
pinMode(ILS_PIN, INPUT);
Serial.begin(115200);
Serial1.begin(115200);
Wire.begin();
mpu6050.begin();
mpu6050.calcGyroOffsets(true);
pixels.setPixelColor(5, pixels.Color(0, 0, 255));
pixels.show();
foot_rf.begin(FOOT_RF_DOUT_PIN, FOOT_RF_SCK_PIN);
foot_rb.begin(FOOT_RB_DOUT_PIN, FOOT_RB_SCK_PIN);
foot_lf.begin(FOOT_LF_DOUT_PIN, FOOT_LF_SCK_PIN);
foot_lb.begin(FOOT_LB_DOUT_PIN, FOOT_LB_SCK_PIN);
pixels.setPixelColor(5, pixels.Color(255, 255, 0));
pixels.show();
}
void loop() {
// lecture des capteurs
mpu6050.update();
if (foot_rf.is_ready()){
force_rf = -(foot_rf.read()-89287)/1000;
ready_rf = 1;
}else{
ready_rf = 0;
}
if (foot_rb.is_ready()){
force_rb = -(foot_rb.read()+41736)/1000;
ready_rb = 1;
}else{
ready_rb = 0;
}
if (foot_lf.is_ready()){
force_lf = -(foot_lf.read()-124089)/1000;
ready_lf = 1;
}else{
ready_lf = 0;
}
if (foot_lb.is_ready()){
force_lb = -(foot_lb.read()-17528)/1000;
ready_lb = 1;
}else{
ready_lb = 0;
}
// led
pixels.clear();
if(force_rf+force_rb+force_lf+force_lb>40){
pixels.setPixelColor(10*(force_rf+force_rb)/(force_rf+force_rb+force_lf+force_lb), pixels.Color(0, 0, 150));
}
if(Serial1.available()>0){
char c = (char)Serial1.read();
//Serial.println(c);
if(c=='B'){
if(test == 0){
test = 1;
}else{
test = 0;
}
}
if(c=='A'){
// envoyer le json
Serial1.print("{\"RF\":{\"F\":");
Serial1.print(force_rf);
Serial1.print(",\"S\":");
Serial1.print(ready_rf);
Serial1.print("},\"RB\":{\"F\":");
Serial1.print(force_rb);
Serial1.print(",\"S\":");
Serial1.print(ready_rb);
Serial1.print("},\"LF\":{\"F\":");
Serial1.print(force_lf);
Serial1.print(",\"S\":");
Serial1.print(ready_lf);
Serial1.print("},\"LB\":{\"F\":");
Serial1.print(force_lb);
Serial1.print(",\"S\":");
Serial1.print(ready_lb);
Serial1.print("},\"GYR\":{\"X\":");
Serial1.print(mpu6050.getGyroX());
Serial1.print(",\"Y\":");
Serial1.print(mpu6050.getGyroY());
Serial1.print(",\"Z\":");
Serial1.print(mpu6050.getGyroZ());
Serial1.print("},\"ANG\":{\"X\":");
Serial1.print(mpu6050.getAngleX());
Serial1.print(",\"Y\":");
Serial1.print(mpu6050.getAngleY());
Serial1.print(",\"Z\":");
Serial1.print(mpu6050.getAngleZ());
Serial1.print("},\"ILS\":{\"S\":");
Serial1.print(!digitalRead(ILS_PIN));
Serial1.print("}}\n");
}
}
if(test == 1){
pixels.setPixelColor(0, pixels.Color(150, 0, 0));
}
pixels.show();
delay(10);
}

 On peut observer un objet qui est capable de marcher : la boite de Pringles. Si vous avez un tube à poster, c'est encore mieux. Vous l'écartez de son équilibre et vous laissez tomber.
On peut observer un objet qui est capable de marcher : la boite de Pringles. Si vous avez un tube à poster, c'est encore mieux. Vous l'écartez de son équilibre et vous laissez tomber.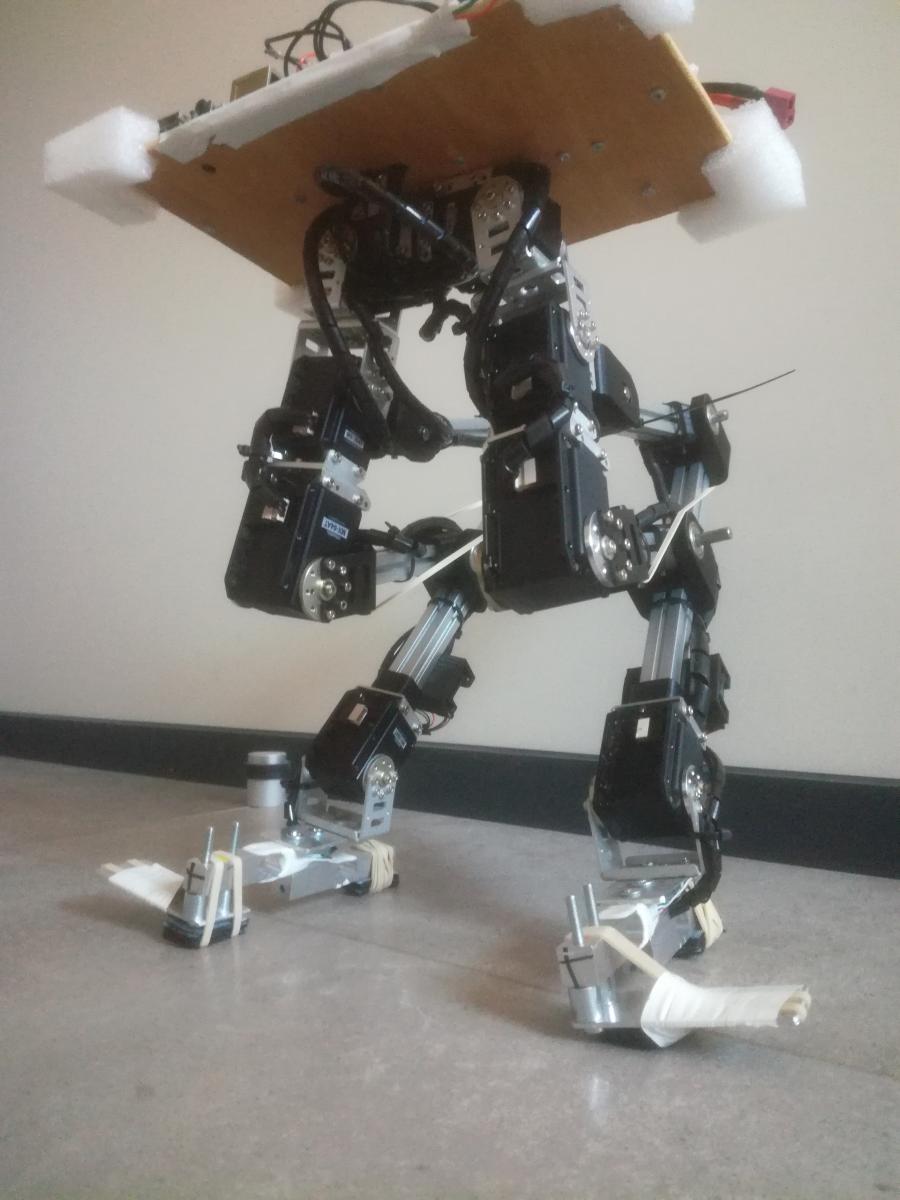

 Un pendule.
Un pendule.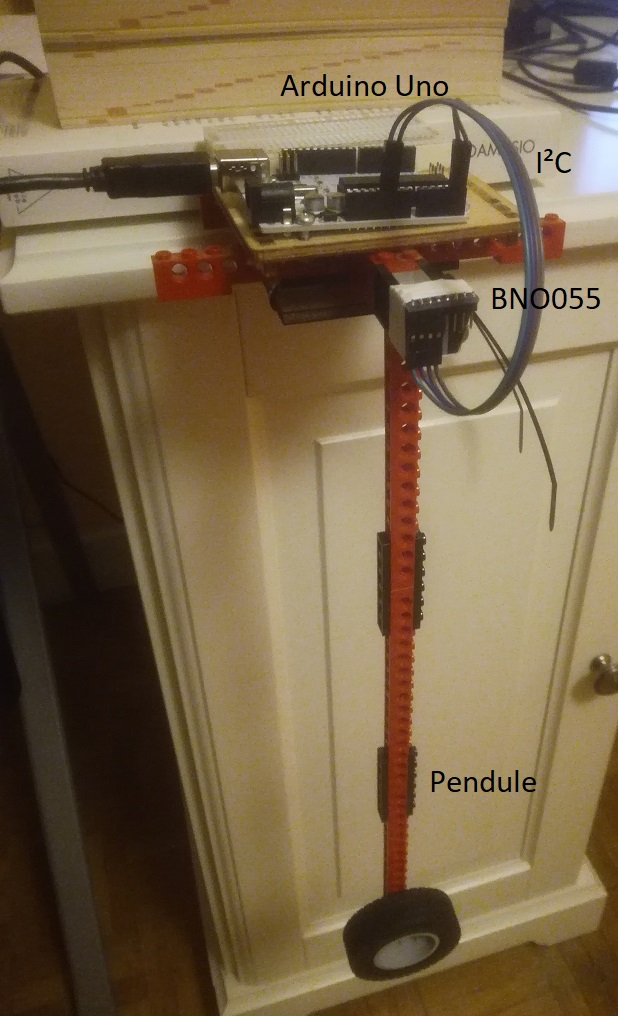











![[En projet] Terran Task Force en 3D de 89 cm du haut avec des servomoteurs AX-12A - dernier message par Robot Urbie en légo](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-8501.jpg?_r=1636615750)


