euh...Neo, pour ton histoire de pin4, t'es sur que tu n'as pas oublié de la connecté ?
les circuits logiques ça aime pas les pattes en l'air, soit a la masse, soit au +Vcc, mais en l'air, c'est pas top.
pour Aquanum:
http://fr.farnell.com/jsp/search/browse.js...t=icd2&Ntx=
138€


Suivez la naissance dIR bObOt !!.... ps : le retour de neo ! THE COME-BACK !
Débuté par Prinz metal ex-neo, avril 26 2009 09:02
2WD
58 réponses à ce sujet
#22

Prinz metal ex-neo
-
- Membres
-

- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 07 juin 2009 - 10:46
euh...Neo, pour ton histoire de pin4, t'es sur que tu n'as pas oublié de la connecté ?
les circuits logiques ça aime pas les pattes en l'air, soit a la masse, soit au +Vcc, mais en l'air, c'est pas top.
non non tkt (j'ai passé plus d'une semaine pour le faire, et j'ai déjas réaliser 1 qui marche) la patte 4 est a +Vcc !, mais il faut la toucher avec le doigt sinon ça marche pas ! je sais c'est fou !

pour Aquanum:
http://fr.farnell.com/jsp/search/browse.js...t=icd2&Ntx=
138€
wawou 138€ ! j'ai bien fait de programmer avec (JDM + mon doigt + trop de probléme)

a+ neo
#23
Aquanum
-

- Membres
-
- 234 messages
Membre occasionnel
- Gender:Male
- Location:Paris
Posté 07 juin 2009 - 11:28
Ah merci pour le lien, j'avais pas pensé à Farnell. Je regarde depuis quelques temps le matos de Lextronic, où l'on trouve l'ICD2 à 164 HT. Ce qui fait quand même une différence 
Enfin à voir car il ne semble pas fourni avec un cable RJ-11, contrairement à Lextronic.
Quoi qu'il en soit, tout ça attendra au moins mon déménagement sur Toulouse dans 3 semaines
Enfin à voir car il ne semble pas fourni avec un cable RJ-11, contrairement à Lextronic.
Quoi qu'il en soit, tout ça attendra au moins mon déménagement sur Toulouse dans 3 semaines
#24
Prinz metal ex-neo
-
- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 10 juin 2009 - 11:49
Coucou 
Heu… en ce moment je galère un peux dans la partie « alimentation » j’ai acheté deux batterie NOKIA 1600, donc 3,7x2=7,4v
Sur la batterie y a trois borne deux pour charge/décharge et l’autre aux milieux ?? D’après moi c’est pour indiquer au téléphone portable que la batterie est chargée ainsi coupé l’alimentation ?? Non ?? si c’est ça j’aimerai bien savoir comment ça marche elle envois surement un signale au moment ou batterie est chargé non ? Parce que comme ça je pourrai éviter la surcharge !
Quelqu’un a une idée… ??
Merci…
Heu… en ce moment je galère un peux dans la partie « alimentation » j’ai acheté deux batterie NOKIA 1600, donc 3,7x2=7,4v
Sur la batterie y a trois borne deux pour charge/décharge et l’autre aux milieux ?? D’après moi c’est pour indiquer au téléphone portable que la batterie est chargée ainsi coupé l’alimentation ?? Non ?? si c’est ça j’aimerai bien savoir comment ça marche elle envois surement un signale au moment ou batterie est chargé non ? Parce que comme ça je pourrai éviter la surcharge !
Quelqu’un a une idée… ??
Merci…
#26
Prinz metal ex-neo
-
- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 10 juin 2009 - 12:45
As-tu essayé d'aller regarder sur les docs constructeur ?
Le problème de ces voyants c'est que ça peut dire tout et son contraire. Le chargement terminé ou en cours ...
Merci pour ton aide Aquanum
Le constructeur n’indique rien, encore moins comment ça marche :/
Beh oui ils n’ont pas prévue l’utiliser sur un robot

#28
Prinz metal ex-neo
-
- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 10 juin 2009 - 10:33
Hello
regardez ce que j’ai trouvé ici
Donc, pas moyen de savoir si ma batterie est chargée à fon ou pas moi je vais l’est chargé une heure 15 car sur un 1600 ça prend 1h 30 je crois pour la charge maxi… moi je ne risque pas
regardez ce que j’ai trouvé ici
"celle du milieu = cest pour detecter que tu a bien une batterie et non une alim de substitution, en gros il faut quelle soit connectée a la masse"
Donc, pas moyen de savoir si ma batterie est chargée à fon ou pas moi je vais l’est chargé une heure 15 car sur un 1600 ça prend 1h 30 je crois pour la charge maxi… moi je ne risque pas
#30
Prinz metal ex-neo
-
- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 25 juin 2009 - 11:22
Coucou tout le monde !
Heu…mon PC a cramé ! Donc je me connecte rarement ! donc moins de news
Petit passage...
Voila ou j’en suis pour le moment :
IR bObOt "le teste 1"
IR bObOt "le teste 2"
Wé wé je sais il évite mal les obstacles mais je l’améliore de mieux en mieux, y a qu’a comparé la premier vidéo avec la 2éme
Pour mon pc : après un petit orage la foudre a frapper un potos électrique, résultat carte mère Grillé …. En fin je suis encore en vie au moins
…. En fin je suis encore en vie au moins
a+ neo
Heu…mon PC a cramé ! Donc je me connecte rarement ! donc moins de news
Petit passage...
Voila ou j’en suis pour le moment :
IR bObOt "le teste 1"
IR bObOt "le teste 2"
Wé wé je sais il évite mal les obstacles mais je l’améliore de mieux en mieux, y a qu’a comparé la premier vidéo avec la 2éme
Pour mon pc : après un petit orage la foudre a frapper un potos électrique, résultat carte mère Grillé
…. En fin je suis encore en vie au moins a+ neo

#32
Prinz metal ex-neo
-
- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 28 juin 2009 - 09:26
SalutC'est dangereux chez toi...L'atelier du savant fou...
Merci ça fait toujours plaisir des commes comme ça

Pas mal tes deux vidéos, tu améliore ca comment ? t'as changé de capteurs ?
Au fait, j’améliore le tout en changent la position des LEDs et le courant qui les alimente
J’ai surtout un problème avec ses LEDs comme c’est des LEDs utiliser pour les télécommande, l’angle de leur émission et trop grand donc le robot détecte des fois le sol comme obstacle, je les est enrouler avec du scotche noire pour diminuer l’angle, ainsi il détecte que les obstacles de devant (barbare je sais
 )
)Sinon ça va…. La je range un peu le bordelle de fil
PS : j’ai réussi a réparer mon PC !

a+ neo
#33
JEF
-

- Membres
-
- 819 messages
Membre passionné
- Gender:Male
- Location:St Cannat (13)
Posté 28 juin 2009 - 10:04
hey Neo !
Tu as des reflecteurs en vente, ça permet d'augmenté la porté de tes led IR en concentrant le rayon lumineux dans un meme angle. Et puis, si tu emet un peu trop d'IR, tu peux peu etre voir a alimenté un peu moin tes led, pour economisé le jus.
++
Tu as des reflecteurs en vente, ça permet d'augmenté la porté de tes led IR en concentrant le rayon lumineux dans un meme angle. Et puis, si tu emet un peu trop d'IR, tu peux peu etre voir a alimenté un peu moin tes led, pour economisé le jus.
++
Chaque jour est le premier du reste de ta vie.
#34
Prinz metal ex-neo
-
- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 28 juin 2009 - 10:33
hey Neo !
Tu as des reflecteurs en vente, ça permet d'augmenté la porté de tes led IR en concentrant le rayon lumineux dans un meme angle. Et puis, si tu emet un peu trop d'IR, tu peux peu etre voir a alimenté un peu moin tes led, pour economisé le jus.
++
Merci pour l'info
JEF mais je ne peux pas acheter sur internet
(je ne savais pas que ça se vend !) Au fait j’ai enroulé les LEDs en du papier alum puis le scotche noire pour ne pas perde les IR
#35
Prinz metal ex-neo
-
- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 30 juin 2009 - 06:04
je fait le ménage
#36
Prinz metal ex-neo
-
- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 06 juillet 2009 - 09:04
Hi !
J’ai refait le look !
Moins esthétique mais… Ça roule mieux ! Comme quoi on ne peut jamais tout avoir
Bref :
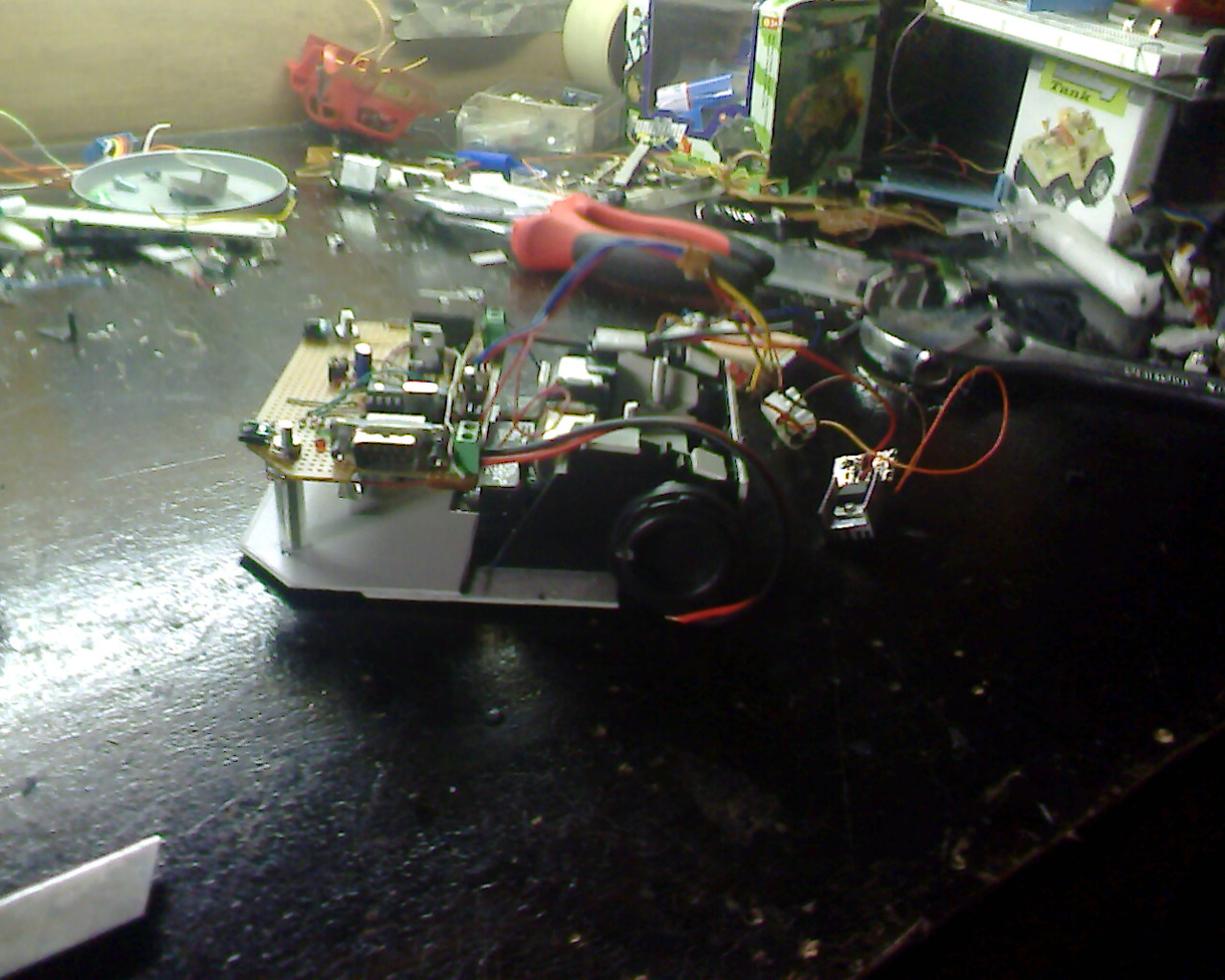
le robot est maintenant plus rabaissé au sole, je l’est pas fait exprès je l’avoue mais après je me suis rendu conte que c’est mieux comme ça… pour la détection du sole
Remarque :
J’ai éliminé la détection du sole IR c’est nul a cause de la couleur du sol qui vari ! je doit trouvé un system mécanique et ça sera surement beaucoup mieux !
! je doit trouvé un system mécanique et ça sera surement beaucoup mieux !
Le look me rappelle un robot de type combat peut être sumo ou un truc pareille
Maintenant pourquoi ce changement… beh a cause des engrenages que j’utilisais le duo (vise sans fin+un pignon)

avec ça si je veux diminuer la vitesse du robot le moindre obstacle arrive a le bloquer (les moteurs n’arrive plus a repartir) donc je dois augmenter l’alimentation des moteurs mais comme ça quand la piste est dégager le robot accélère trooooop…. La solution utiliser un system d’engrenage différent ! Trois pignon de plus et sans vise sans fin de cette manier les moteurs peuvent faire avancer le robot sans trop d'effort alors je peux garder la vitesse que je veux !
Le bilan des carcasses sacrifier lol :
lol :
Une carcasse PS1, une carcasse super nintendo 8bit , un jouette, deux carcasses de clavier et deux carcasses d’empli pc…qu’ils reposent en paix

J’ai refait le look !
Moins esthétique mais… Ça roule mieux ! Comme quoi on ne peut jamais tout avoir
Bref :
le robot est maintenant plus rabaissé au sole, je l’est pas fait exprès je l’avoue
mais après je me suis rendu conte que c’est mieux comme ça… pour la détection du sole Remarque :
J’ai éliminé la détection du sole IR c’est nul a cause de la couleur du sol qui vari
! je doit trouvé un system mécanique et ça sera surement beaucoup mieux !Le look me rappelle un robot de type combat peut être sumo ou un truc pareille
Maintenant pourquoi ce changement… beh a cause des engrenages que j’utilisais le duo (vise sans fin+un pignon)
avec ça si je veux diminuer la vitesse du robot le moindre obstacle arrive a le bloquer (les moteurs n’arrive plus a repartir) donc je dois augmenter l’alimentation des moteurs mais comme ça quand la piste est dégager le robot accélère trooooop…. La solution utiliser un system d’engrenage différent ! Trois pignon de plus et sans vise sans fin de cette manier les moteurs peuvent faire avancer le robot sans trop d'effort alors je peux garder la vitesse que je veux !
Le bilan des carcasses sacrifier
lol :Une carcasse PS1, une carcasse super nintendo 8bit
, un jouette, deux carcasses de clavier et deux carcasses d’empli pc…qu’ils reposent en paix
#38
arcane
-

- Membres
- 33 messages
Nouveau membre
Posté 08 juillet 2009 - 08:27
je suis fan de tes robot neo!! j adore le desordre sur ta table mdr dommage que tu puisse pas mieux te fournir en composant tu aurai deja crée le robot parfait lol en tout cas bravo et continu de nous mettre au courant sur tes robot 
#39
Prinz metal ex-neo
-
- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 09 juillet 2009 - 07:17
je suis fan de tes robot neo!! j adore le desordre sur ta table mdr dommage que tu puisse pas mieux te fournir en composant tu aurai deja crée le robot parfait lol en tout cas bravo et continu de nous mettre au courant sur tes robot
Y a des fans cool !
Le teste n°3…, nouveau châssis
Voila je l’ai fait roulé c’est plutôt bien, mais il fait encore n’emporte quoi….a amélioré encore
Sinon ça roule mieux ce nouveau chassie le robot tourne mieux sur lui-même comme si il été équipé de vrais servomoteur !
a+ neo
#40
Prinz metal ex-neo
-
- Membres
-
- 463 messages
> Membre d'honneur <
- Gender:Male
- Location:Algérie
Posté 12 juillet 2009 - 11:35
Salut !
Ammm….j’ai un petit problème au niveau de mon l298… il chauffe ! Et je ne sais pas si je dois lui mettre un dissipateur ou pas O_o
Dans le datasheet (fichier joint), page 2 dans « ABSOLUTE MAXIMUM RATINGS » d’après ce que j’ai compris le IC peut fonctionner a 130° sans problème c’est ça?? Mais comment je peux savoir si mon IC atteint cette température je n’ai pas trouvé par exemple un graphe indiquant la température en fonction de la tension d’alimentation, Va-t-il cramer?
Merci de m’aidé
Ammm….j’ai un petit problème au niveau de mon l298… il chauffe ! Et je ne sais pas si je dois lui mettre un dissipateur ou pas O_o
Dans le datasheet (fichier joint), page 2 dans « ABSOLUTE MAXIMUM RATINGS » d’après ce que j’ai compris le IC peut fonctionner a 130° sans problème c’est ça?? Mais comment je peux savoir si mon IC atteint cette température je n’ai pas trouvé par exemple un graphe indiquant la température en fonction de la tension d’alimentation, Va-t-il cramer?
Merci de m’aidé
Fichier(s) joint(s)
-
 l298.pdf 600,26 Ko
216 téléchargement(s)
l298.pdf 600,26 Ko
216 téléchargement(s)
Répondre à ce sujet









Aussi étiqueté avec au moins un de ces mots-clés : 2WD
Découvertes →
Concours tournois et autres compétitions →
Coupe de France de robotique / Eurobot →
Synthèse de RCVA ses 10 ans de participations à la CDRDébuté par Mike118, 02 oct. 2018 |
|

|
||
2WD
Projets et réalisations, robots et machines en tout genre →
Robots roulants, chars à chenilles et autres machines sur roues →
le commencement du premier robotDébuté par geek maxou, 18 avril 2012 |
|

|
0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users

