

au moins sa me motive a chercher mais les transistors c'est bon pour controller mon robot ou je doit chercher une autre technique ?
Cordialement Maxou

Membre passionné

Posté 14 mai 2012 - 11:13
A.R.M.I
Autonomous Robotics Mechanics Intelligent
Staff Robot Maker

Posté 14 mai 2012 - 06:47
@Mike118: c'est moi ou tu commences a perdre patience ?! ^^
 Suffit de voir le sujet " robot pour le college " ^^ si non repars en arrière dans la discussion pour relire ce que j'ai dis concernant ces deux "composants" et si après relecture tu n'as pas compris, explique moi ce que tu ne comprends pas )
Suffit de voir le sujet " robot pour le college " ^^ si non repars en arrière dans la discussion pour relire ce que j'ai dis concernant ces deux "composants" et si après relecture tu n'as pas compris, explique moi ce que tu ne comprends pas )
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre passionné
Posté 14 mai 2012 - 08:08

A.R.M.I
Autonomous Robotics Mechanics Intelligent
Staff Robot Maker
Posté 14 mai 2012 - 08:24
pour les transisotors c'est le hacheur non ?
Le pont en H c'est deux resistance en parralele ?
Et pour mon controlleur des relais pourrait suffir ?
Desoler si je ne comprend pas tres bien
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre passionné
Posté 14 mai 2012 - 08:33

A.R.M.I
Autonomous Robotics Mechanics Intelligent
Staff Robot Maker
Posté 14 mai 2012 - 08:50
oui mes par contre je ferai ca demain car je suis sur mon mp
et j'ai trouver des schema et des information sur un controlleur MLI mais je ne comprend pas tres bien est-ce que tu sais ce que c'est ?
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Staff Robot Maker
Posté 14 mai 2012 - 09:49
Un signal MLI (Modulation de Largeur d'Impulsions) est un signal PWM, c'est juste pas la même langue ^^
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre passionné
Posté 15 mai 2012 - 07:12
A.R.M.I
Autonomous Robotics Mechanics Intelligent
Membre chevronné

Posté 15 mai 2012 - 07:41
j'essaye d'allumer mon ordi des que je suis pret et je fais ce que tu ma demander
pour le MLI c'est comme le L293D en plus pluissant ?
J'esseye de mettre ce que j'ai trouver sur le MLI
cordialement Maxou
pour le MLI c'est comme le L293D en plus pluissant ?

Membre passionné
Posté 15 mai 2012 - 09:43
A.R.M.I
Autonomous Robotics Mechanics Intelligent
Membre passionné
Posté 16 mai 2012 - 01:49
A.R.M.I
Autonomous Robotics Mechanics Intelligent
Membre passionné
Posté 18 mai 2012 - 04:27
#include <Servo.h>
#define AVANT 1
#define ARRIERE 0
#define GAUCHE 2
#define DROITE 3
#define SERVOG 1
#define SERVOD 0
#define VMAX 5
Servo servog;
Servo servod;
int getNeutral(int s)
{
if(s == SERVOG)
return 86;
else
return 84;
}
void handleS(int s, int speed)
{
//Vitesse :
// 0 -> 0; 1 -> 1; 2 -> 3; 3 -> 8; 4 -> 10; v => 5 -> 30
int tab[6] = {0,1,3,8,10,30};
int pos = getNeutral(s);
int acc;
if (speed < 0)
acc = - tab[abs(speed)];
else
acc = tab[speed];
if(s == SERVOG)
servog.write(pos += acc);
else
servod.write(pos -= acc);
}
void move(int direction)
{
int m1 = 0, m2 = 0;
switch(direction)
{
case DROITE: m1 = 1; m2 = -1; break;
case GAUCHE: m1 = -1; m2 = 1; break;
case AVANT: m1 = 1; m2 = 1; break;
case ARRIERE: m1 = -1; m2 = -1; break;
}
handleS(SERVOG, m1*VMAX);
handleS(SERVOD, m2*VMAX);
}
void setup()
{
servog.attach(3);
servod.attach(9);
move(AVANT);
}
void loop()
{
delay(15);
}
A.R.M.I
Autonomous Robotics Mechanics Intelligent
Membre chevronné

Posté 18 mai 2012 - 05:17
Membre passionné
Posté 18 mai 2012 - 06:27
A.R.M.I
Autonomous Robotics Mechanics Intelligent
Membre passionné
Posté 18 mai 2012 - 09:21
A.R.M.I
Autonomous Robotics Mechanics Intelligent
Membre passionné

Posté 19 mai 2012 - 10:08
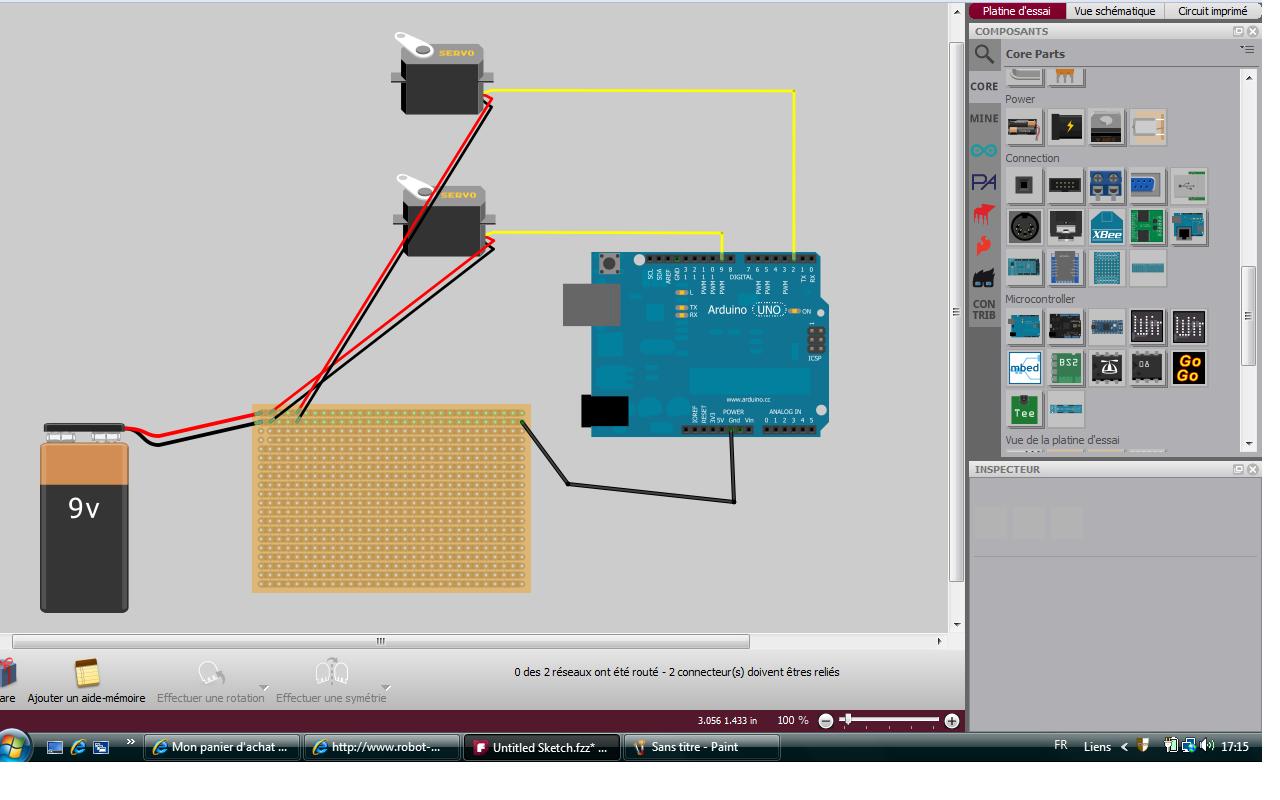
Postes tout ton code ça aidera peut être. Ou alors tu as peut être mal effacé un ancien programme ? (simple suggestion).Sinon c'est bizarre mais quand je branche mes servo sur le pin 2 et 9 alors que le dans le code c'est les pin 3 et 9 les servo tourne dans un sens inverse de l'autre ^^'

Membre chevronné
Posté 19 mai 2012 - 10:42
Membre passionné
Posté 19 mai 2012 - 10:58
A.R.M.I
Autonomous Robotics Mechanics Intelligent









Découvertes →
Concours tournois et autres compétitions →
Coupe de France de robotique / Eurobot →
Synthèse de RCVA ses 10 ans de participations à la CDRDébuté par Mike118, 02 oct. 2018 |
|

|
||
2WD
Projets et réalisations, robots et machines en tout genre →
Robots roulants, chars à chenilles et autres machines sur roues →
Suivez la naissance dIR bObOt !!.... ps : le retour de neo ! THE COME-BACK !Débuté par Prinz metal ex-neo, 26 avril 2009 |
|
|
0 members, 0 guests, 0 anonymous users




