C'est vrai, ça manque d'explication.
Voilà comment fonctionne mon système de mesure de distance:
-grâce a 2 cameras légèrement décalées je capture 2 images légèrement décalées aussi.
-j'applique a ces 2 images les mêmes filtres de reconnaissance (de visage par exemple).
-j'entoure ce qui est reconnue par un rectangle sur chaque image puis calcule leur centre de gravité respectif. J'ai donc 2 points distincts avec leur coordonnées connues.
-je calcule la distance de ces 2 points en utilisant leurs coordonnées et avec Pythagore.
-je fais reconnaitre qqch à mes cameras et je fais une calibration: Je place l'objet à différentes distances et j'observe comment varie la distance des 2 centres de gravité. Je rentre ça dans un tableur et je trouve le modèle mathématique qui colle le mieux à mon échantillon de mesures.
Ce que j'ai observé sur le comportement d'un système comme celui-ci:
-plus les 2 cameras vont être distantes l'une de l'autre, plus ce sera précis de près et pourra mesurer loin.
-plus le champ de vision est grand, plus la courbe de précision va être aplati, concrètement ca va surtout diminuer la portée de la mesure. Inversement pour la résolution, plus elle sera grande, plus la mesure de distance entre les 2 points sera précise.
Mon problème:
J'ai 2 cameras qui ne sont pas beaucoup espacées, donc de base je sais que la portée ne sera pas grande. J'ai augmenté le champ de vision, ce qui accentue mon problème de portée.
Ce que je comptais faire, puisque je ne peux pas augmenter la résolution pour des problèmes de temps de calcules, c'est zoomer de la même façon sur chaque image pour augmenter la précision de la mesure de distance entre les 2 points(puisque j'augmente le nombre de pixels entre ces 2 points). Cette méthode ne fonctionne pas assez vu la tête des courbes que j'ai joint au message d'avant. J'ai mal imaginé le phénomène, j'ai pensé que la partie précise de la courbe se serait déportée en même temps que zoomer, mais non.
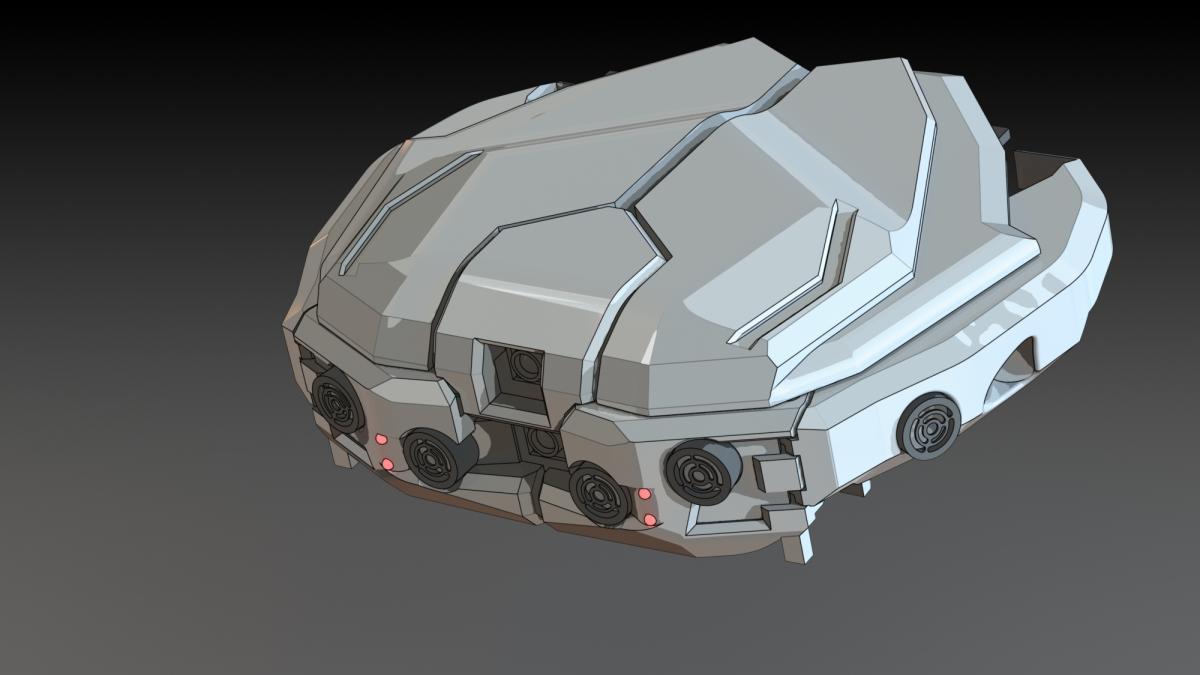
Info à part: J'ai choisis cette disposition des caméras car la logitech c920 a sont électronique en largeur, les éloigner horizontalement ca aurait fait une tête trop grosse. Et je ne veux pas trop les éloigner verticalement car je veux une tête assez plate. Je ne me facilite pas la tâche..
J'espère que je suis plus explicite maintenant




















![[Mecapi] Projets scientifiques et plans de communication - dernier message par macerobotics](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-9400.png?_r=1700632519)



