Désolée du retard !
/*****Mesure********* (cm)*/ const int COAX =3.6; const int FEMUR =5; const int TIBIAS=10; /**************************/ const int Y_LARGEUR=8.6; const int X_LONGEUR=11.1; const int HAUTEUR=5; const int HAUTEUR_CORPS=5.5; const int EMPATTEMENT=8; const int DISTANCE_patte_G=6;
void IK()
{
//IK simple (hauteur , latéral , longitudinal ) :
double deplacementcentreX;
double deplacementcentreY;
double deplacementcentreZ;
double Offset_Y = (X_LONGEUR / 2) + deplacementcentreY;
double Offset_X = Y_LARGEUR / 2 + deplacementcentreX;
double Offset_Z = HAUTEUR - (HAUTEUR_CORPS / 2) + deplacementcentreZ;
double L = sqrt(pow(HAUTEUR,2)+pow(EMPATTEMENT,2)); //Calcul de l'hypothénuse (Pythagore)
Serial.print(L, DEC);
Serial.println();
/***Al-Kashi***/
double alpha = acos((-pow(FEMUR,2) + pow(TIBIAS,2) + pow(L,2))/ (2*TIBIAS*L));
double beta = acos((pow(FEMUR,2) - pow(TIBIAS,2) + pow(L,2))/ (2*FEMUR*L));
double gamma = acos((pow(FEMUR,2) + pow(TIBIAS,2) - pow(L,2))/ (2*FEMUR*TIBIAS));
alpha = alpha*57.3;
beta = beta*57.3;
gamma = gamma*57.3;
Serial.print(alpha, DEC);
Serial.println();
Serial.print(beta, DEC);
Serial.println();
Serial.print(gamma, DEC);
Serial.println();
}
hypothenuse = 9.4339809417
//en degrée :
alpha = 29.6365776062
beta = 81.4718017578
gamma = 68.9048843383
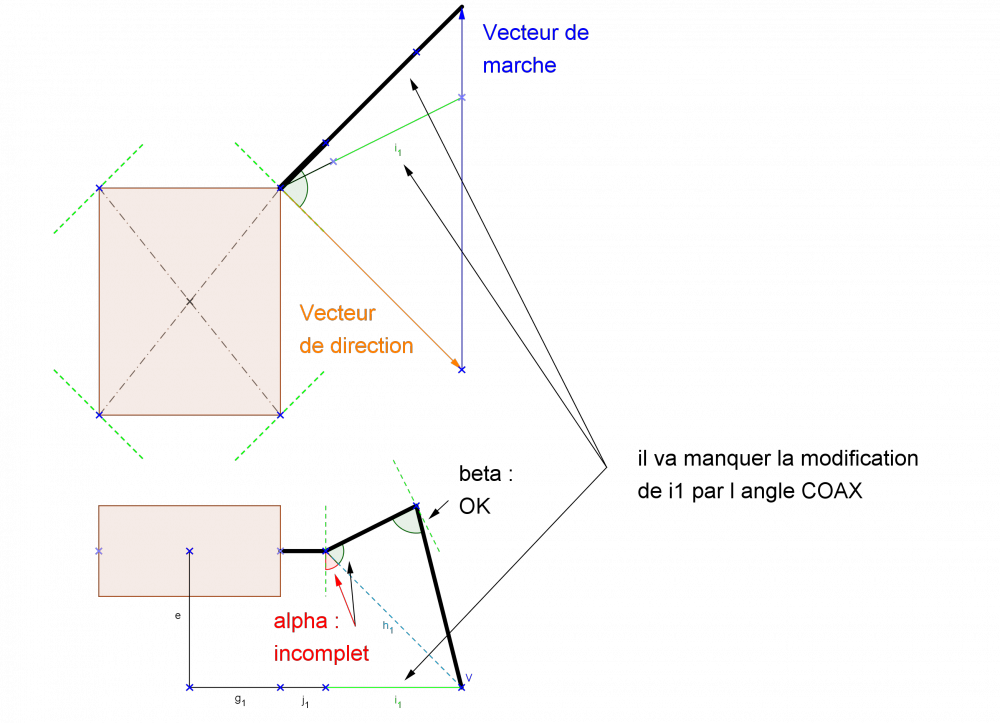
Quand pense-tu, cela te semble correcte ?
J'ai pris toutes les dimensions que tu m'a montrée sur t'es schéma 
il y a juste hauteur_corps et hauteur la différence ou je suis pas sur, il s'agit de l’épaisseur du corps du robot !