Mon contenu
Mon contenu Homme
Homme








Salut les makers,
Allez on a avancer aujourd'hui :
- Mis en place du potar de régulation de vitesse
- Mise en place d'un bouton marche/arrêt
Je vous propose une petite vidéo de tout ça :
- Mike118 aime ceci
 Posté par
- 15 novembre 2019 - 01:02
Posté par
- 15 novembre 2019 - 01:02
Salut les makers,
Allez on a avancer aujourd'hui :
- Mis en place du potar de régulation de vitesse
- Mise en place d'un bouton marche/arrêt
Je vous propose une petite vidéo de tout ça :
Posté par
- 15 novembre 2019 - 12:59
Salut les makers,
Je vois que personne n'a chômer à par moi, la rentrée des classes a eu lieu en septembre pour les enfants, les petits et les grands et j'ai fais moi aussi ma rentrée en ... Septembre, je voulais démarrer une nouvelle année avec un nouveau projet, voir autre chose mais c'était compliqué et là depuis 3 jours enfin ....
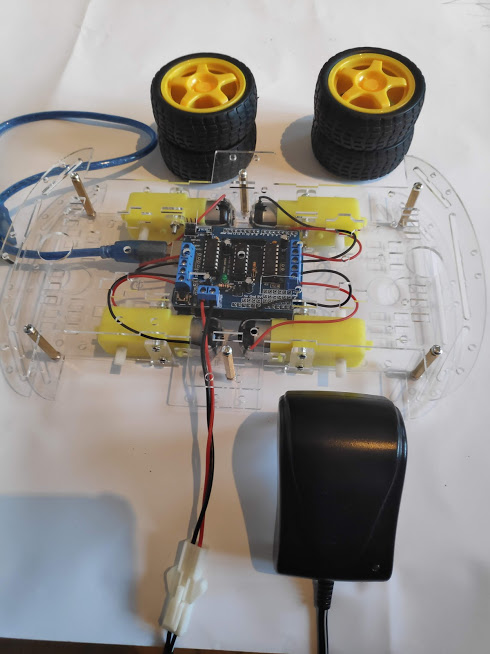
J'avais depuis pas mal de temps (environ 1 an ) réussit a faire l'acquisition (cadeaux Amazon) d'un kit communément appelé "Smart Car 4WD" qui comprend un châssis en acrylique transparent 4 moteurs jaune (ça y est tout le monde voit le kit), un peu de visserie et un peu de notice. J'étais content d'avoir eu ce kit gratuitement grâce a Amazon en prime par ma femme suite a quelques déboires, mais bon je l'ai laissé de côté en y pensant un peu chaque jour depuis 1 an et là oui je suis procrastinateur professionnel mon plus grand défaut je suis arrivé au jour où j'ai ressortit ce carton plein de poussière et je m'y suis mis.
J'avais déjà lu pas mal de commentaire sur ce produit et ce qu'il en ressortait c'était pas génial, un peu branlant pas fiable mécaniquement, mais le reste allait. pour ma part je vais pas m'en plaindre j'ai pas payé et la moyenne des prix que j'ai pu voir c'était environ 15 - 20 euros et c'est pas mal, c'est plus qu’honnête, ça reste certes du plastique, mais tout fonctionne correctement.
Par contre les défauts que j'ai pu voir, c'est surtout toutes les images du produit fini, c'est beau et tout, mais avec ce kit et que le kit on peux pas aller bien loin, on est très loin de finir surtout quand c'est préciser pour débutant en électronique, simple à mettre en œuvre alors que franchement la notice donné avec et bien ouais on monte le kit et c'est tou,t rien d'électronique, c'est un châssis et un 4 moteur et c'est tout.
Mais bon j'avais envie depuis longtemps d'avoir un robot roulant et j'aurais du commencer par ça plutôt que par mon bipède mdr...
Le cahier des charges est simple : ce servir de ce kit . oui c'est simple
J'ai fais le montage mardi matin grâce à la notice qui ne sert à rien et voila un chassis avec 4 moteurs et des roues, donc on va chercher son fer a souder pour souder de jolie fils sur les moteurs ( le débutant n'a pas de fer a souder ) .
Puis j'ai pris mon driver moteur acheter sur la boutique https://www.robot-ma...ld-moteurs.html j'ai ouvert l'emballage et misère c'est un shield qui se met sur une Arduino Uno ( et ouais j'ai pas tout lu sur la boutique pourtant clairement explicite) donc bon on prend son arduino uno on accouple les deux et voilà
Par contre j'ai pas chercher de tuto sur le fofo sur ce fameux shield, j'ai juste pris le bout de code dispo sur la boutique et trouver quelques info sur le net pour exploiter ce shield qui marche parfaitement bien. Si tuto n'a pas je veux bien en faire un.
J'avais un peu d'appréhension lorsque j'ai vu que le mieux était d'utiliser la bibliothèque Adafruit motor shield, je ne savais pas où je mettais les pieds, je me suis dit encore un truc compliqué, avec des propres termes a apprendre en plus et tout et tout et finalement c'est d'une facilité déconcertante, ma seule question est pourquoi la vie n'est pas aussi simple que cette bibliothèque???
Donc voila ce nouveau projet qui sort du chapeau mais qui me plait bien et après avoir fait mon bipède je me sens très a l'aise.
Mais bon on va quand même ce mettre des contraintes et faire des choses intéressantes avec.
1ere contrainte : Tout doit rentrer entre les deux plaques qui forme le chassis et tout c'est tout.
2eme contrainte : Mon fils qui a presque 3 ans doit pouvoir jouer avec et laisser mon bipède tranquille avant qu'il ne me le casse !!!!
3eme contrainte : un capteur de distance monter sur un servo devant pour les obstacles( tourner et truc et tout). (servo 9G avec capteur IR Sharp 41yp)
4ème contrainte : faire un truc avec des boutons et tout et tout ( inter ON/OFF, bouton poussoir marche/arret, et un potar pour régler la vitesse)
et voilà on a fait le tour des différentes contraintes et aspect de ce projet relativement simple quand on a des notions ou qu'on cherche a en avoir.
Et dejà envie de modifier tout ça avec mes propres cartes électroniques faite maison, avec un châssis fait maison mais chaque chose en son temps
Posté par
- 07 septembre 2019 - 04:43
Posté par
- 18 juillet 2019 - 10:03
Salut à tous, je rejoins pmdd sur l'idée, oui j'aime moi aussi rencontré des personnes en vrai avec qui je discute sur le forum, et j'ai beaucoup aimé pouvoir rencontré pmdd et Yamo et j'ai du faire pas loin de 900km pour cela et je ne le regrette absolument pas, pour Toulouse je pense y aller faut que je bosse mon Bipede pour ça (la c'est repos) et pourquoi y aller avec un petit robot roulant simple (autant faire de la route autant y aller avec plus de robot et a Lyon ça ma donné envie d'en faire un.
Donc pour ma part oui je suis pour un bonne grosse rencontre même si je suis de Paris je m'en fou, même dans le Larzac avec des chèvres, avec pourquoi pas un petit concours.
Au faite y'a encore des apérobot sur Paris au dernier bar avant la fin du monde parce que bon je pourrais faire un effort !!!
Posté par
- 03 juillet 2019 - 08:23
Très intéressant comme outil de conception surtout que je cherchais du régulateur de tension ces jours ci et comme j'adore les faire moi même je m'y pencherais un peu plus deçu a tête reposé. Merci de ton partage
Posté par
- 03 juillet 2019 - 10:26
Posté par
- 30 juin 2019 - 08:33
De retour de Lyon, affaire déballer et quelques réflexion sont venu durant les 6 heures de route depuis Lyon.
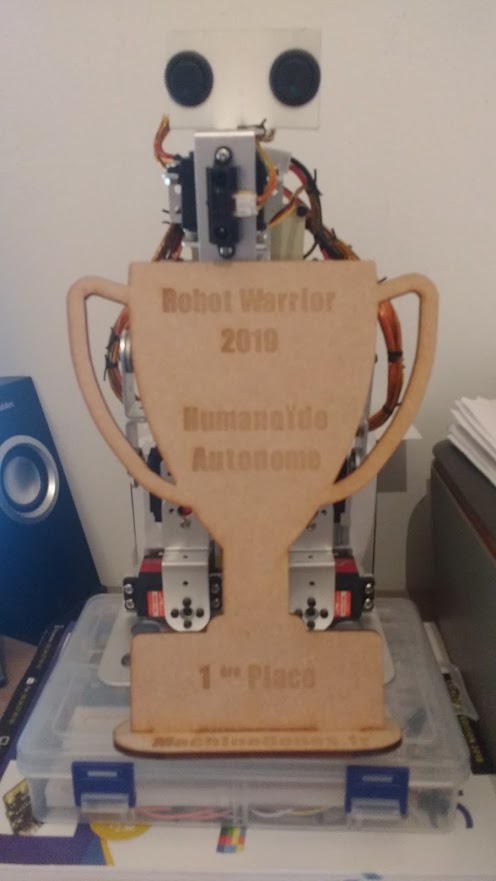
J'ai fait plusieurs constat de ce concours Robot Warrior organiser par l'association Machine Gones et par Yamovince.
1 - Je me suis rendu compte que finalement j'étais parfaitement capable de faire beaucoup de choses en gagnant la 1 ère place dans le challenge humanoide autonome. Et ce constat m'enthousiasme à continuer et à persévérer.
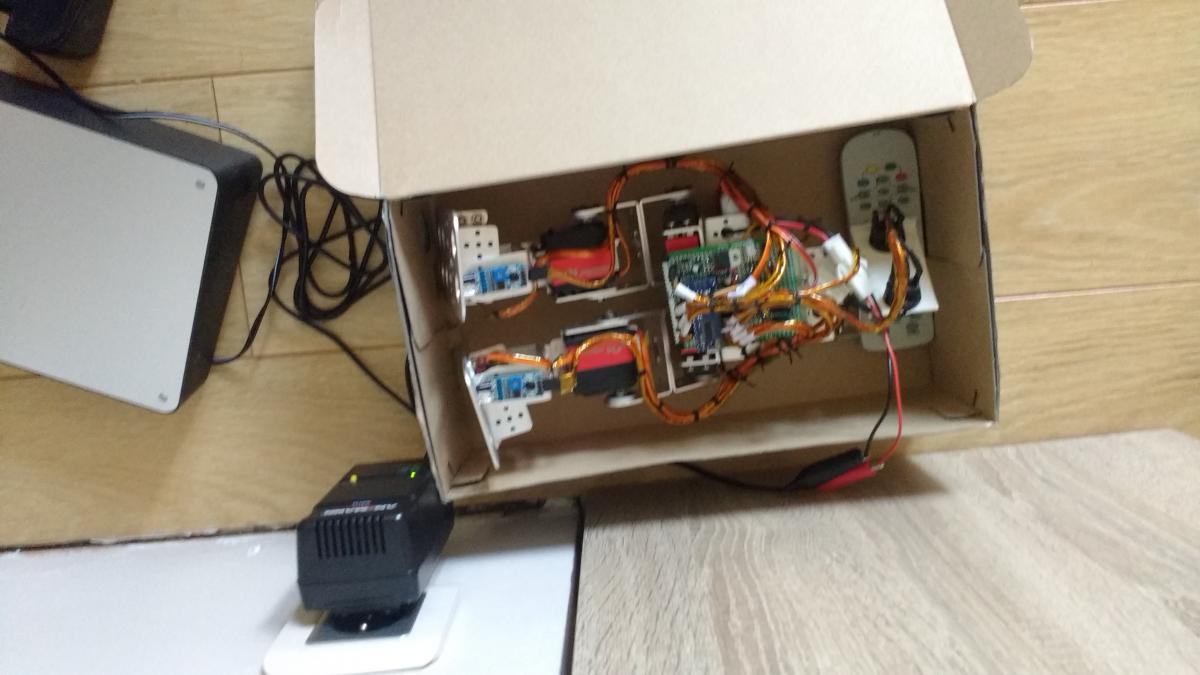
2 - J'avais déjà remarqué chez moi et durant la compétition que mon régulateur de tension 6V chauffait beaucoup, il était brûlant, après consultation de la consommation de mes servos et de l'intensité max pouvant être délivré par mon régulateur qui est de 1,2A max et pouvant faire une pointe à 3,3A.
Donc avec dejà 7 servos d'une conso de 180mA sans charge je suis bien au delà donc j'avais prévu de refaire une nouvelle carte électronique plus ergonomique, mieux organiser et avec 2 régulateurs en sachant que dans le futur j'aimerais lui rajouter 2 bras.
3- La batterie est bien, elle permet un bon équilibre, une bonne puissance, une très bonne autonomie mais elle empêche que mon bipede puisse se relever à tout les coups donc des bras s'impose.
4- Le code à été 95% fonctionnel, seul la différence entre le blanc et le bois est compliqué a faire donc des valeurs absurde, le manque de bras pour bien se relever et surtout mon bipède qui dévie de temps en temps, j'ai re-tester chez moi sans rien changé et il allait droit (chaleur au concours, servo qui ce sont fatigué, je ne sais pas). Mais sinon le code a bien marché, enfin le premier qui était fonctionnel, j'avais pas fini celui avec ma nouvelle méthode. Il faut juste que je revois la mise en route/arrêt avec le TSOP qui me foutait la merde avec les 2 tilts ce qui faisait qu'a certaines manche à la mise en route il détectait la chute et tenter de se relever.
Donc a revoir la mise en route, peut être passer a un module de commande en bluetooth je ne sais pas si plus simple a coder et plus fiable,
A revoir la détection de chute en mettant un accéléromètre plutôt que des simples tilts.
A la fin de ce concours je pensais me reposer passer à un autre projet mais j'ai envie d'améliorer ce bipede, surtout améliorer le code, le perfectionner, qu'ils soit plus robuste et plus pro. J'ai déjà mes axes de travail a faire. Et j'ai surtout envie de faire un nouveau bipede avec de nouvelles servos qui soit plus adapté au poids et à l'effet de levier suivant leur positionnement, de faire certaines pièces pour limiter le nombre de vis, de refaire la carte electronique, d'ajouter 2 bras et plein d'autres choses mais ce n'est pas pour tout de suite et j'en ferai un post dédier le moment venu.
C'est plus ou moins la fin d'une aventure celle de la version 1.0 et on va pouvoir demarré la version 1.1 
Posté par
- 29 juin 2019 - 06:23
plusieurs manches, mi. Capteur de distance pour le coup de boule inopérant, David était un poil trop petit pour le capteur, et comme prévu les capteurs noir/blanc ne marchait pas au top seulement 1 sur 2 et je réussi a gagner le match je ne sais trop comment tellement je ne croyais en rien.
Posté par
- 29 juin 2019 - 04:59
Posté par
- 28 juin 2019 - 04:52
Posté par
- 27 juin 2019 - 09:44
Posté par
- 26 juin 2019 - 08:34
@pmdd je te rejoins sur plusieurs point :
1 - Première compétion de robotique et j'essaie de ne rien oublier
2 - Après la galère de mon Arduino nano avec le port USB arraché, j'ai essayer de le recoller mais rien ne s'allume en USB donc pas de téléversement possible juste l'utilisation du programme existant dessus est possible, donc on va le garder en trophée mdr. Donc préparation d'un nouveau Nano (heureusement j'en ai plusieurs de rechange) et la le drame : programme erratique, cafouillage sur une servo, je savais cette servo defectueuse donc on ouvre et oui servo plus aligné je trouvais le 90° avec une commande à 119° donc changement rapide de la servo par une autre que j'avais en stock (encore heureusement), et là mieux au niveau du calibrage mais toujours un comportement erratique et non prévu, un tour dans le programme et là je trouve de suite (Dieu me parle des fois à 2grammes souvent  ) donc oui faut pas mettre n'importe quoi dans une boucle while on y sort très vite
) donc oui faut pas mettre n'importe quoi dans une boucle while on y sort très vite  . Donc pour le moment ça va mieux on va dire on continue les réglages ce soir à la fraîche, oui la chaleur peux être fatale.
. Donc pour le moment ça va mieux on va dire on continue les réglages ce soir à la fraîche, oui la chaleur peux être fatale.
En tout pmdd je suis heureux que tu es réussi à te sortir de cette galère rien de pire que la panne le jour J surtout après tant de boulot. Et dommage pour le cri du kamikaze ça aurait été trop fun mais bon parfois vaut mieux assurer ce qu'on maîtrise plutôt que de partir sur des choses qui ne le feront pas gagné même pire perdre !!!
Pour ma part j'ai écris au moins 10 version de programme et je n'en retenu que 2 et pour le moment 1 seul est presque parfait donc on va le garder c'est sur, on va bosser sur le 2ème si vraiment il y a le temps.
J'ai hâte que tu les dévoile vendredi soir et surtout hâte de les voir samedi tes 2 monstres  .
.
@yamovince bien les journalistes et surtout le montage souvenir bon plus qu'à passer un coup de polish alors !!!!
Posté par
- 22 juin 2019 - 08:58
Posté par
- 19 juin 2019 - 06:24
Edit 2 : en fait tu as plus d'amplitude sur le mouvement de droite que celui de gauche apparemment.
Posté par
- 19 juin 2019 - 04:18