Mon contenu
Mon contenu Homme
Homme




 Posté par
Posté par De retour du tournoi de la Tour du Pin.
Un grand bravo aux organisateurs, chaque année est meilleure que la précédente, ambiance bonne enfant, animation et équilibre dans les combats. 32 robots, les organisateurs ont réussi le tour de force de faire combattre chaque robot 9 fois, autant que le vainqueur, entre les poules (tirage suisse) repêchage, et les tours finaux.
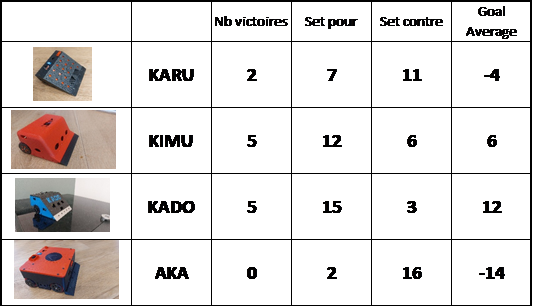
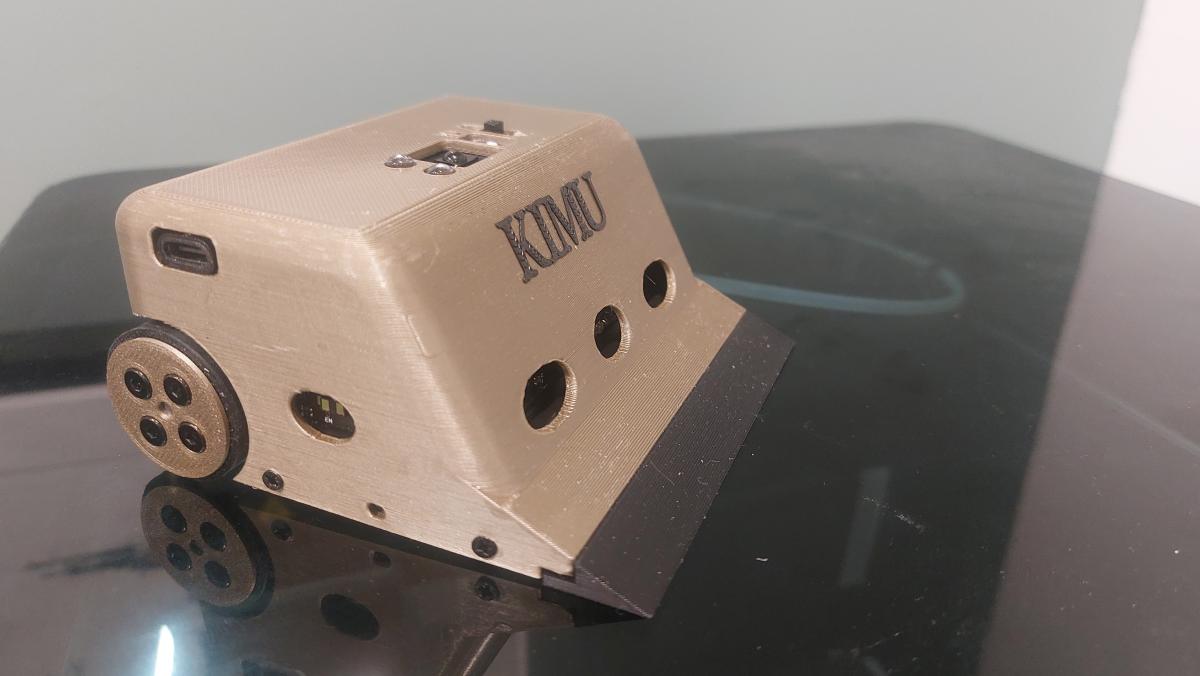
Personnellement belle journée, 8 victoire de KIMU pour une défaite contre...KADO en poule et KADO 8 victoires pour une défaite contre...KIMU en quart de finale. Et victoire en finale de KIMU, finale serrée, doublé après Nîmes et 4ème tournoi emporté d'affilée entre Nîmes et La Tour du Pin 2025/2026. Cette année KIMU succède à KARU.
Là , maintenant, c'est le grand vide, il faut se remobiliser. Mon projet est d'abandonner les mini-sumos tueurs et de me lancer dans le mini-sumo original, plus viser le panache que la victoire.
Démonstration de labyrinthe aussi, très sympa, j'ai du travail pour résoudre le labyrinthe avec boucle et surtout pour faire le run final en coupant les angles des cases. Ceci dit je ne suis pas si loin que ça, un challenge en perspective !
Une petite vidéo sur une des manches de la finale...
- Mike118 aime ceci





 , je reviens au réel et je vous présente ma team 2026 :
, je reviens au réel et je vous présente ma team 2026 :

 , il est préférable de ne pas attendre 2 mois pour s'inscrire!
, il est préférable de ne pas attendre 2 mois pour s'inscrire!