Mon contenu
Mon contenu Homme
Homme




L'octopus c'est un cadeau pour mes neveux (que je n'ai pas vu depuis 4 mois) je termine la deuxième dans 30mn (18h30 de temps d'impression !).
- Oracid aime ceci
 Posté par
- 03 juin 2020 - 12:03
Posté par
- 03 juin 2020 - 12:03
L'octopus c'est un cadeau pour mes neveux (que je n'ai pas vu depuis 4 mois) je termine la deuxième dans 30mn (18h30 de temps d'impression !).
Posté par
- 02 juin 2020 - 12:51
Mon caisson pour ma nouvelle venue : une Ender 3 Pro :



Bruit à 1m : environ 32dB.
Température interne stabilisée : 35°C.
Hygrométrie : 17%.
Poids : 34kg.
J'ai commandé avec ça :
nouvelle carte mère BIGTREETECH SKR V1.4 Turbo 32 bits
+ driver TMC 2209
+ 2x Noctua 40x10
+ 1x Noctua 40x20
+ 1x Noxtua 60x10
+ 2m bande LED télécommandée.
Avec ces changements, l'imprimante ne devrait plus faire aucun son !
Je conserve mes bobines déjà entamées dans le caisson histoire qu'elles ne prennent pas l'humidité.
Par la suite, j'ai envie de surélever le caisson pour ajouter un compartiment inférieur afin d'y ranger mes bobines au sec.
Vidéo ici sur ma chaîne YT :
Les plans en pièce jointe.
 Caisson imprimante 3D.zip 4,28 Mo
277 téléchargement(s)
Caisson imprimante 3D.zip 4,28 Mo
277 téléchargement(s)
Posté par
- 18 mai 2020 - 04:26
Hello,
Une idée d'amélioration que j'ai déposée à mon boulot aujourd'hui : un système d'ouverture de porte SANS LES MAINS !
Quant on voit le nombre de personne qui ne se lavent jamais les mains et que vous avez à vous saisir de cette foutue poignée des WC en sortant ça m'horripile à chaque fois !
ici, la société MATERIALISE nous donne une solution toute trouvée et en plus libre de droit et directe à imprimer chez soit en fonction de tous les type de poignée !
https://www.material...cal-information
Donc maintenant, à moins de vouloir imprimer des visières pendant 30 ans, pensez à imprimer ces ouvres porte, la contamination passe avant tout par les mains !
Cheers ! 
Skyhack.
Posté par
- 29 mars 2020 - 06:39

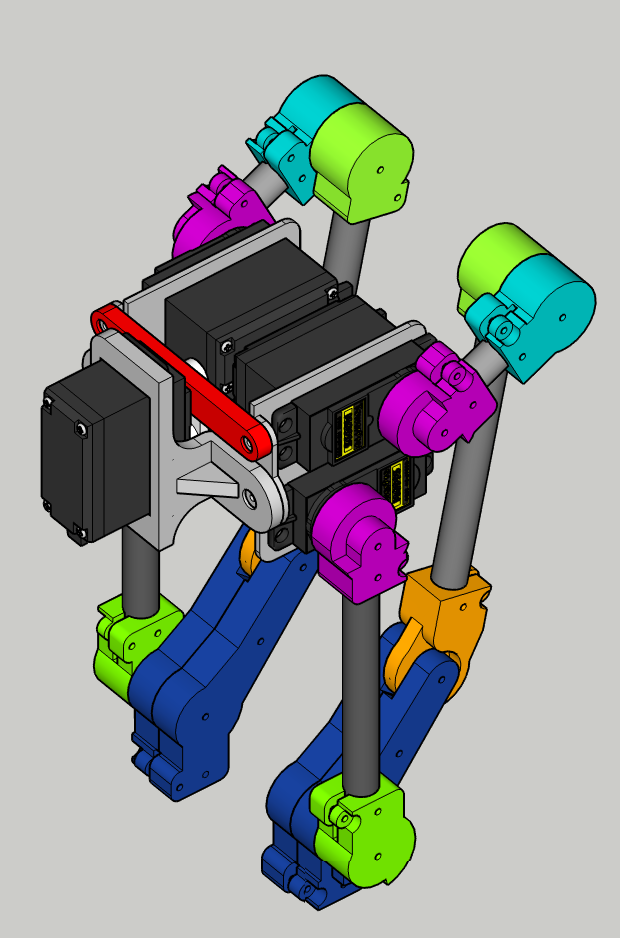
La barre bleu pivote autour d'un point flottant qui change de position.
En version 3D (pas dans le plan) c'est plus coton car il faut gérer les interfaces entre les barres au centre car elles se coupent toutes au centre.
https://www.youtube....eature=youtu.be
Posté par
- 29 mars 2020 - 01:21
Posté par
- 29 mars 2020 - 08:55
Posté par
- 28 mars 2020 - 11:24
Posté par
- 03 mars 2020 - 09:09
ça c'est très intéressant. Enfin quelqu'un qui gère l'adaptabilité des articulations du robot à son environnement et non l'inverse comme énormément le font !
Posté par
- 02 mars 2020 - 12:00
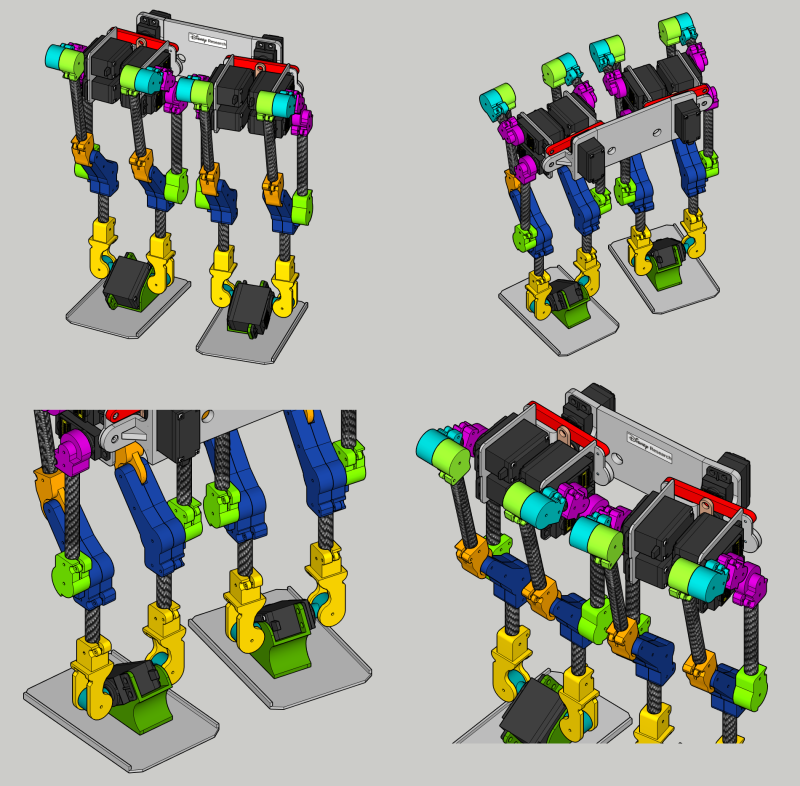
Oh mais t'inquiète, le travail que j'ai réalisé est pour tout le monde et personne à la fois.
Je l'ai fait pour le challenge de reproduire un robot en CAO à l'échelle avec l'aide d'un seul plan et de 5 côtes ainsi que d'une vidéo.
Le robot est quant à lui très facile à réaliser pour qui a une imprimante 3D et 12 servos en stock.
Posté par
- 02 mars 2020 - 11:19
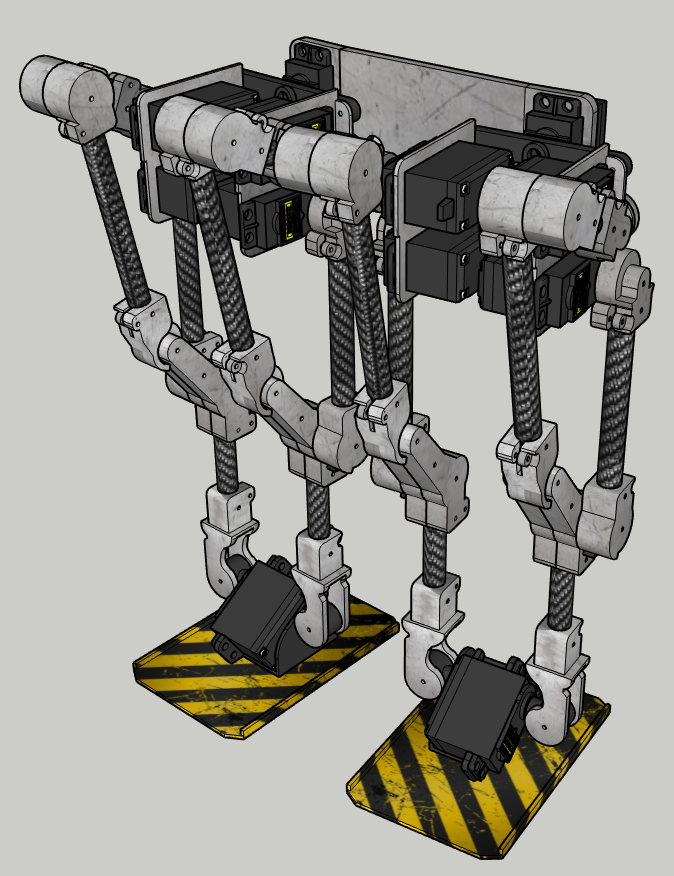
Et oui tout est symétrique. Comme ça on peux même voir les mouvements des deux jambes, par contre pas possible de faire des liens cinématiques type pivot/rotule etc. Pour cela, il te reste ton imagination ou alors te retaper tout le modèle sous Fusion ou Catia mais là ça va demander beaucoup plus de temps de travail.
Dernière version à jour (quelque coquilles corrigées).
Skyhack.
Disney - last CAD (3).zip 3,76 Mo
208 téléchargement(s)
Posté par
- 01 mars 2020 - 02:41
update.
disney.zip 3,79 Mo
195 téléchargement(s)
Posté par
- 01 mars 2020 - 11:31
J'avais l'intention initiale d'ouvrir un nouveau sujet, mais oui je suis d'accord, en tout cas lui il est prêt !
Posté par
- 01 mars 2020 - 10:20
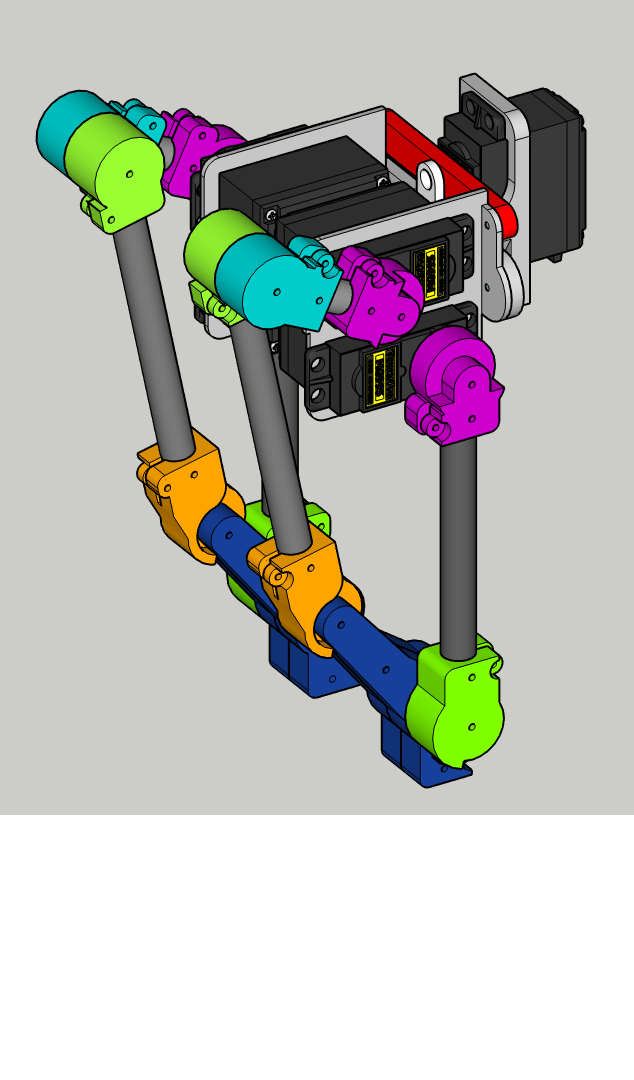
Voilà c'est fini !
Il est à l'échelle, toutes les dimensions sont respectées et proviennent du dossier de recherche.
Si vous voulez le réaliser, la CAO sketchup est dispo, à vous de l'améliorer pour gérer les vis et les pivots corectement.
Skyhack.
disney.zip 2,74 Mo
188 téléchargement(s)