

 Mon contenu
Mon contenu Homme
Homme


Bonjour,
pour information la Toulouse Robot Race aura lieu à nouveau cette année sous sa forme Tiny du 30 mai au 1er juin au Roselab pendant le Faire Festival. L'annonce officielle sera bientôt faite. 
- daniel31300 aime ceci
 Posté par
- 29 janvier 2024 - 09:31
Posté par
- 29 janvier 2024 - 09:31
Bonjour,
pour information la Toulouse Robot Race aura lieu à nouveau cette année sous sa forme Tiny du 30 mai au 1er juin au Roselab pendant le Faire Festival. L'annonce officielle sera bientôt faite.
Posté par
- 07 juin 2023 - 08:55
Merci pour vos retours, les liens, les docs et les descriptions détaillées sur ce forum sont vraiment de qualité. Je ferai tout pour participer la fois prochaine, mon robot Imaginarium à turbine a des choses à montrer je pense 
Si je vous dis que pour la prochaine, on décide de supprimer la ligne blanche au centre, ça vous fait peur ?
Posté par
- 24 avril 2023 - 09:37
Pour info, pour l'instant, 5 quadrupèdes sont sur la grille de départ !!
Oracid
Ylo2
Carré 92
Mini pupper
Caliban Midi
On a aussi 8 roulants qui font tous la course DLVV
Mais qu'un seul piéton pour le moment.
Posté par
- 04 avril 2023 - 01:55
Et voici un note concernant le feu de départ, qui peut désormais se faire sans caméra.
 note feu.pdf 766,89 Ko
13 téléchargement(s)
note feu.pdf 766,89 Ko
13 téléchargement(s)
Posté par
- 24 février 2023 - 01:51
Bonjour,
Voici le lien d'inscription pour la prochaine Toulouse Robot Race les 2 et 3 juin
https://docs.google....Tunq7w/viewform
Elle aura lieu au Roselab pendant le festival "Faire festival"
Elle aura lieu selon les même conditions que la précédente Tiny TRR avec des modifications :
- le sol sera du linoleum donc moins glissant que le béton ciré et pourra être placée à un autre endroit moins perturbé par le Soleil.
- pour la course "DANS LA VRAIE VIE", le feu de départ est plus simple qu'avant, c'est juste un gros feu rouge (on considère que c'est plus l'évitement d'obstacles qui est intéressant)
Posté par
- 30 novembre 2022 - 09:59
Je n'aimerais pas être la personne qui appuie sur l'arrêt d'urgence, je ne suis pas sur que la tête tienne le cou. Il y a clairement des choses à améliorer et corriger mais je n'ai pas souvenir d'un robot destiné à la vente qui fait de la manutention (ASIMO était étudié pour mais à titre de recherche)
Je pense que c'est vraiment le point important. Pour le déplacement, il y a clairement moyen d'être moins risqué.
J'espère qu'ils pensent aux intégrateurs/installateurs de robots sinon, ça va être délicat à déployer par tout un chacun ou les professionnels.
Posté par
- 29 novembre 2022 - 07:45
V'la plus d'infos :
je note vraiment la partie saisie d'objets par une poignée avec des QRcode, et le remplacement des jambes par un système bouboule qui permet une silhouette verticale pour justement saisir les objets. La surcouche personnage n'est pas déplaisante même si le visage est un peu palôt.
Il s'agit de prendre du recul sur cette machine.
Posté par
- 27 novembre 2022 - 10:21
Une boite de robots sans doutes à surveiller : Enchanted Tools.
Ils montrent leur premier proto dans quelques jours (29 novembre 2022)
Par les premières images révélées, la machine semble pour le moins surprenante en rapport avec un Teslabot.
Posté par
- 27 novembre 2022 - 10:15
Pour information, voici un autre simulateur pour la grande piste pour l'instant fait par l'équipe turbodroid en 2018 :
https://github.com/t...ace/turbot-simu
Posté par
- 25 novembre 2022 - 01:41
Merci pour ces idées !! Le "Toulouse Robot Show" ça donne des idées en effet.
en effet, coller ou peindre des choses au sol s'avère plus problématique que de poser des barrières. Les lieux sont plus frileux du scotch. Sinon, il faut dérouler un tapis ou une bâche avec les choses imprimées dessus et c'est encore plus encombrant et galère à stocker.
serait-il possible d'éliminer la ligne centrale ? ce serait l'idéal mais cette ligne centrale permet de rendre plus accessible la course.
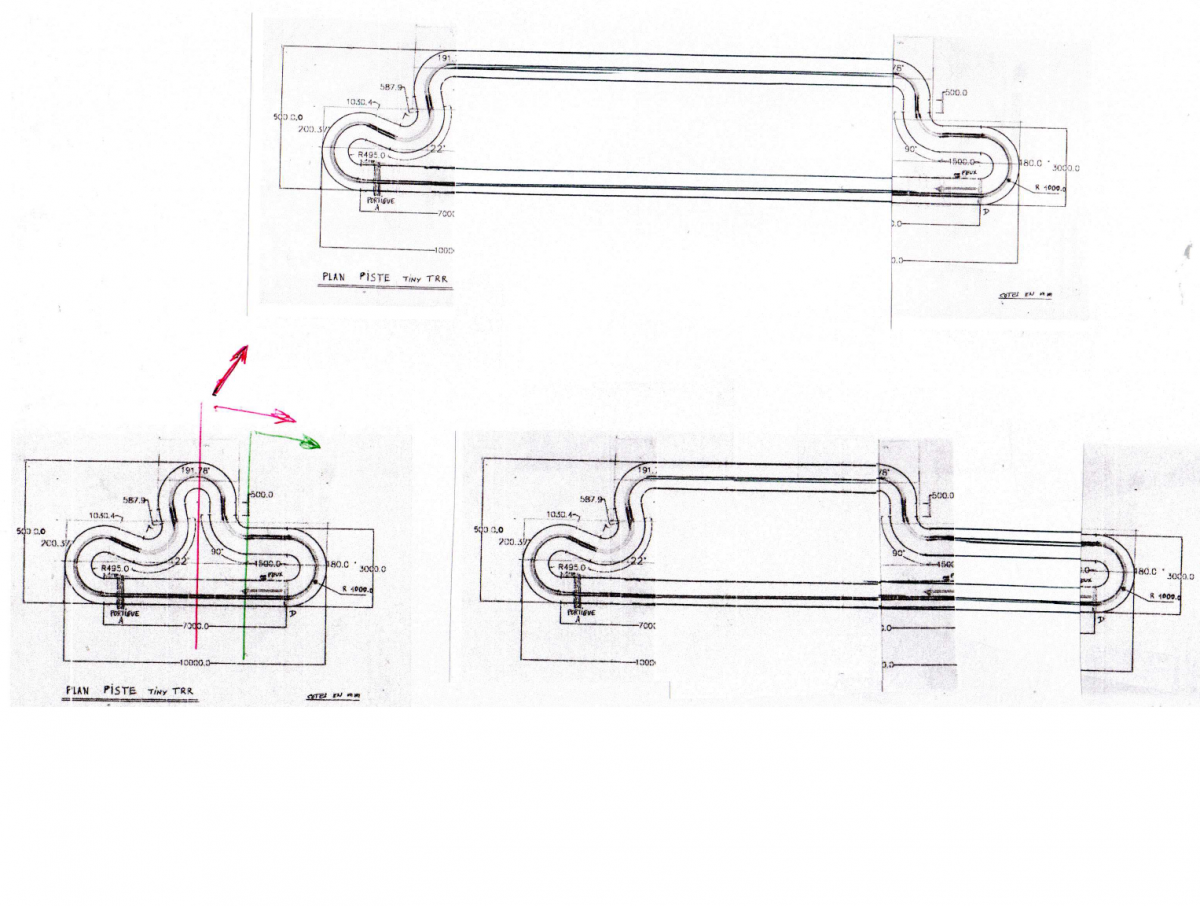
On imagine aussi une piste rallongée qui permettrai d'arriver à la dimension de l'ancienne piste mais plus étroite.
deux designs sont possible en faisant des rallonges :
Posté par
- 20 novembre 2022 - 06:47
Bon la première Tiny Toulouse Robot Race est terminée. Merci à tous pour votre participation et votre passion. J'ai personnellement beaucoup apprécié ce moment même si le robot n'a pas été au top (il a fait des drifts non prévus tout de même)
Vous trouverez le classement général : http://www.toulouse-robot-race.org/
Si vous avez des remarques, des critiques, des améliorations ou des idées, n'hésitez surtout pas.
La prochaine compétition, nous allons bientôt l'annoncer, mais ce serait aux alentours de début juin 2023.
Posté par
- 10 novembre 2022 - 09:46
Hello,
le version officielle du règlement est désormais ici :
http://www.toulouse-robot-race.org/reglement-tiny-trr/
Ca répond à la majorité de tes questions je pense. "L'arche" s'appelle désormais le "portique" et correspond à la ligne d'arrivée
la ligne droite des bipèdes/quadrupèdes fait 6m.
Posté par
- 08 novembre 2022 - 02:13
Vous pouvez arriver le vendredi quand vous voulez pour des essais. Pour un resto le soir, je prépare ça avec grand plaisir j'envoie une communication aux participants ce soir.

