Mon contenu
Mon contenu Homme
Homme






 Posté par
Posté par Petit retour.
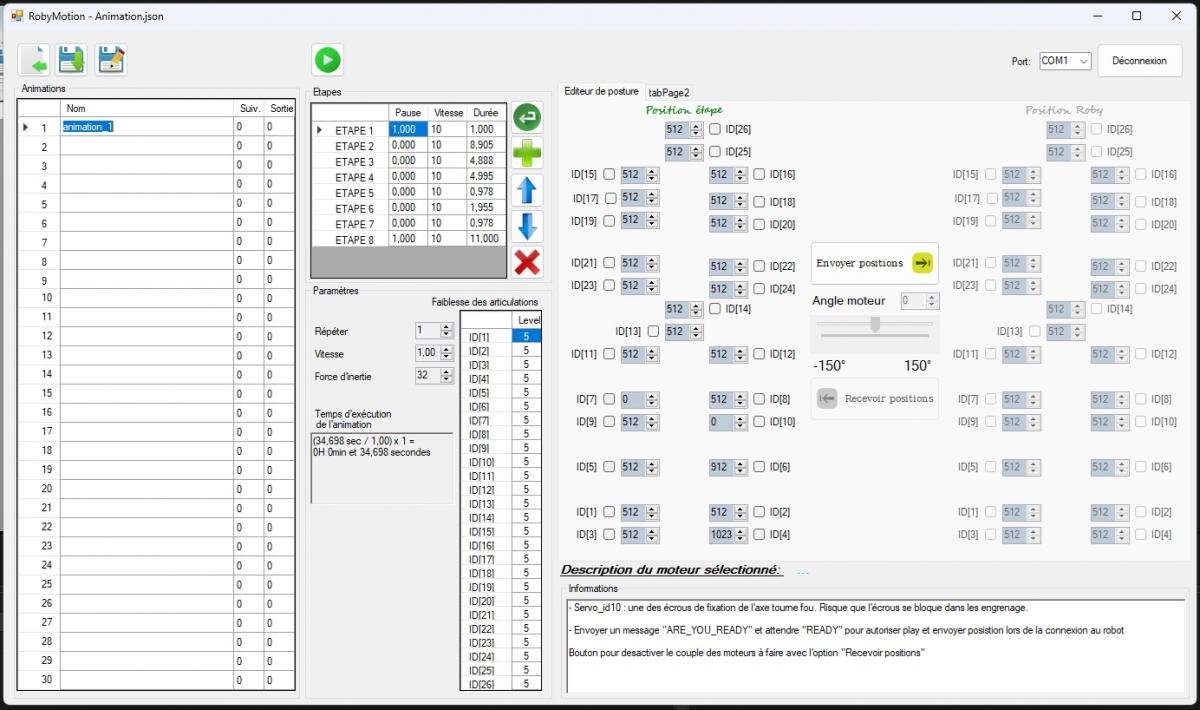
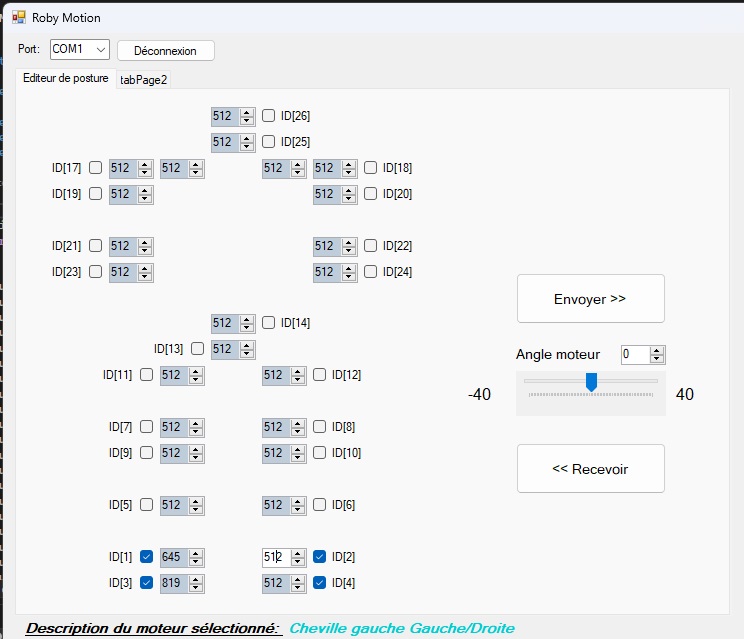
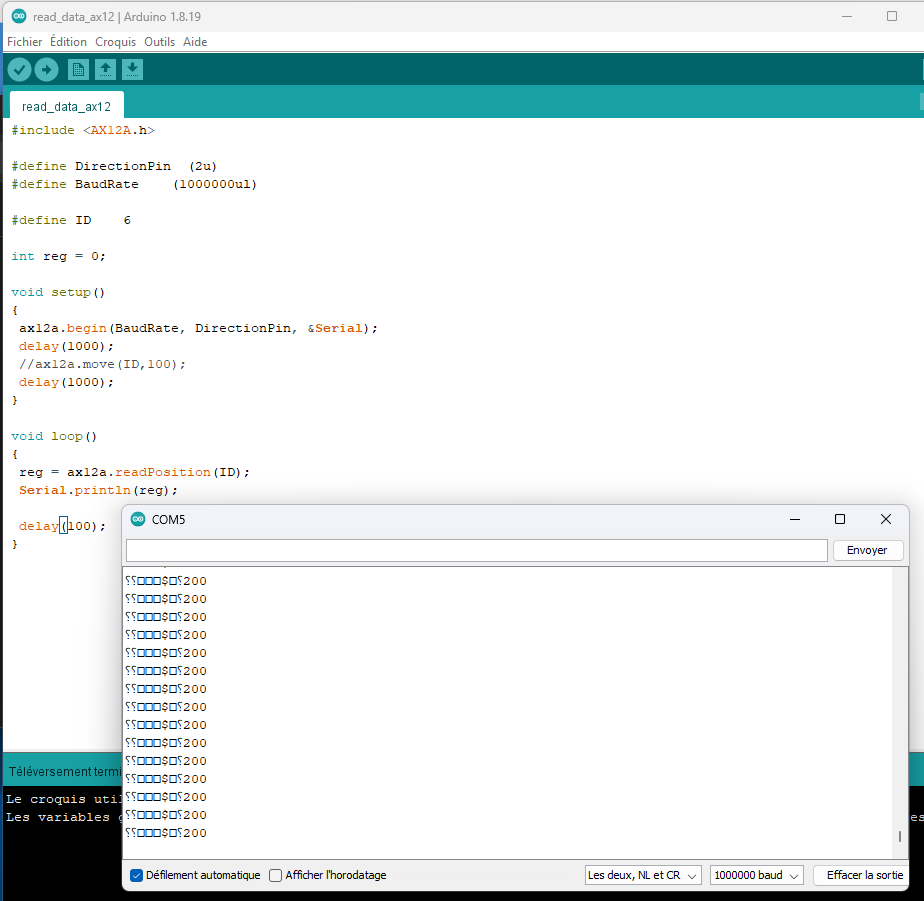
C'est OK pour la récupération des data des servomoteurs AX_12.
J'avais inversé les fil GND et Data. Heureusement, ça na pas occasionné de dommage sur les servomoteur testé. 
Il me reste à créer cette fonction syncWrite() qui n'es pas existante dans la bibliothéque Ax_12
https://github.com/j...rvo-library.git
- Oracid aime ceci