Mon contenu
Mon contenu Homme
Homme






 Posté par
Posté par Salut
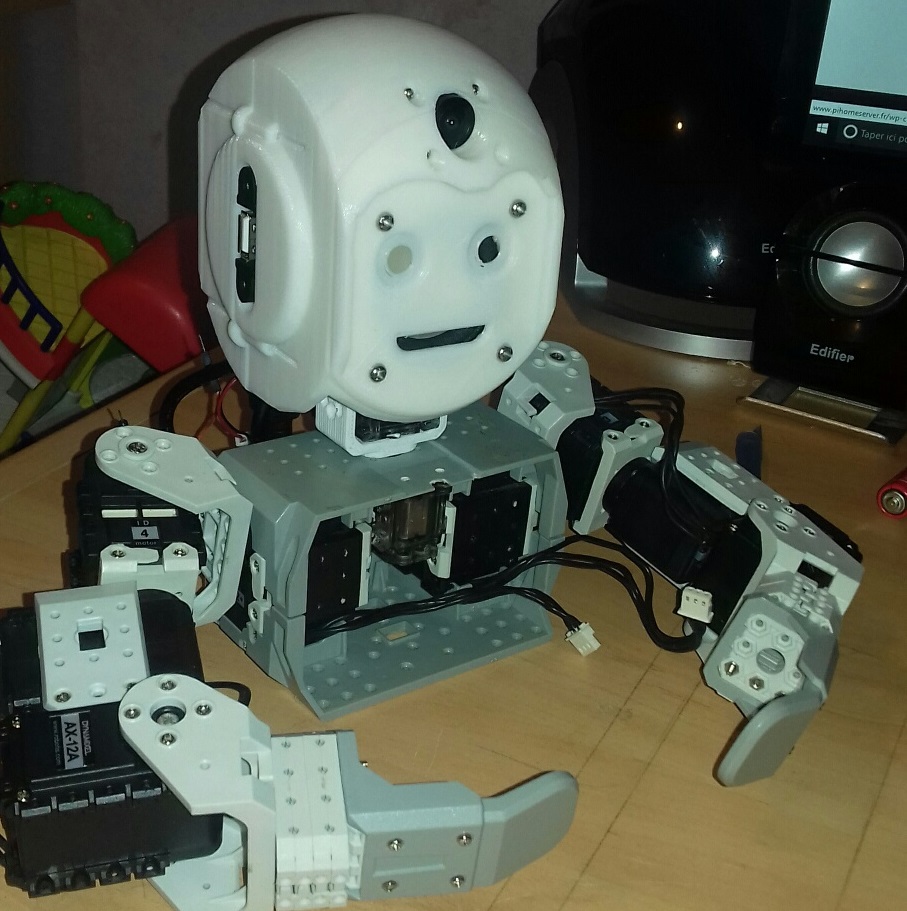
Bon boulot !
Sinon, il y avait également la possibilité d'utiliser des "servos treuil" qui font 360° (à ne pas confondre avec les servos à rotation continue).
Je sais qu'il existe des servomoteur 360° mais j'ai déjà celui la à la maison. 
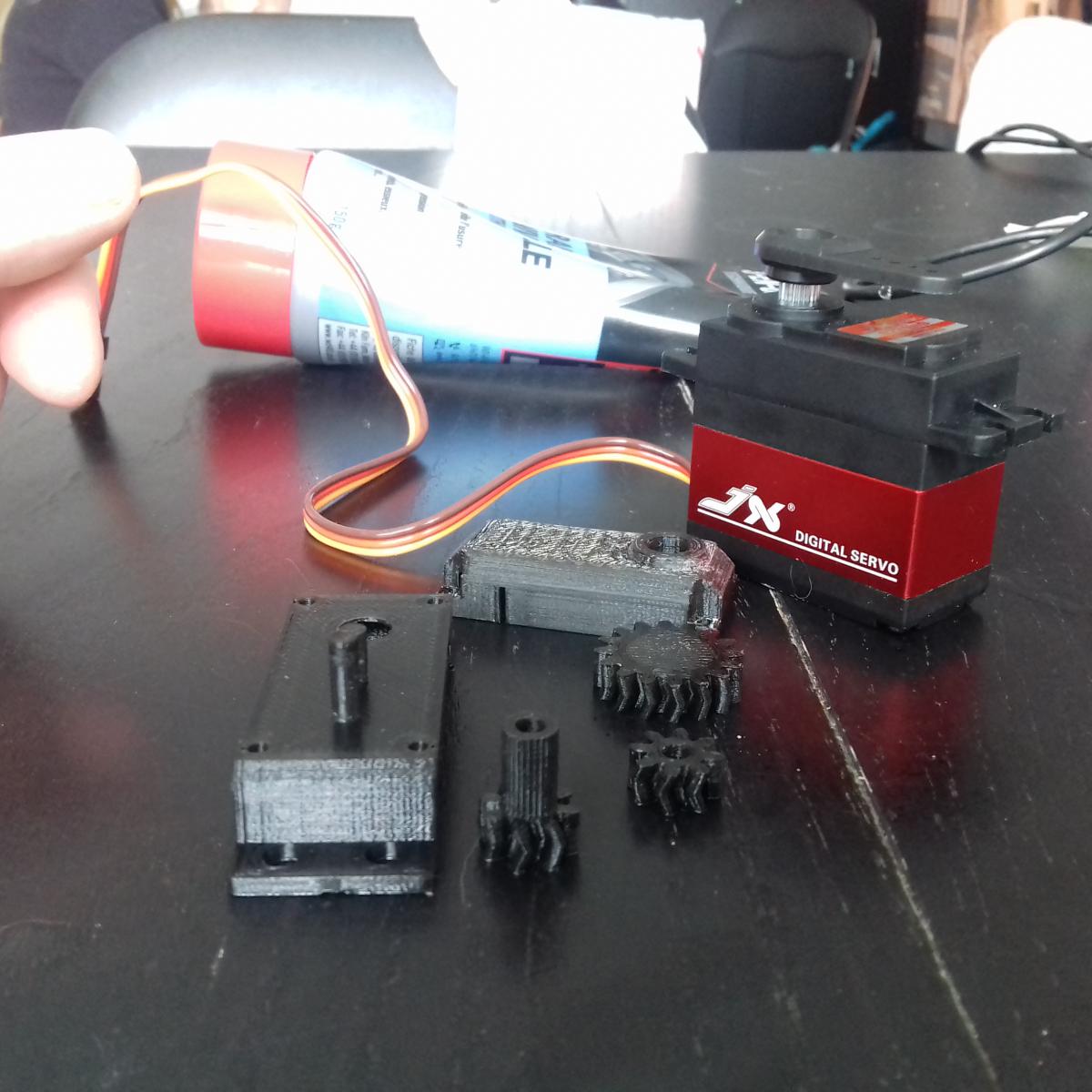
Et en découpant l'axe de butée ? Je sais qu'il est monté a froid sur l'engrenage sinon en cassant les fond de butée en plastique sur le capot ?
Ça m'intéresse comme je possède 7 servo de ce type. Après je trouve ça regrettable de devoir diviser par 2 le couple mais bon ingénieux quand même ton principe. T'a tout imprimer en 3d engrenage compris ?
J'ai vu qu'il y avait des solutions en démontant et en coupant l'axe de butée.
Le truc c'est que je voulais garder le servomoteur intact pour pouvoir le ré-utiliser si besoin
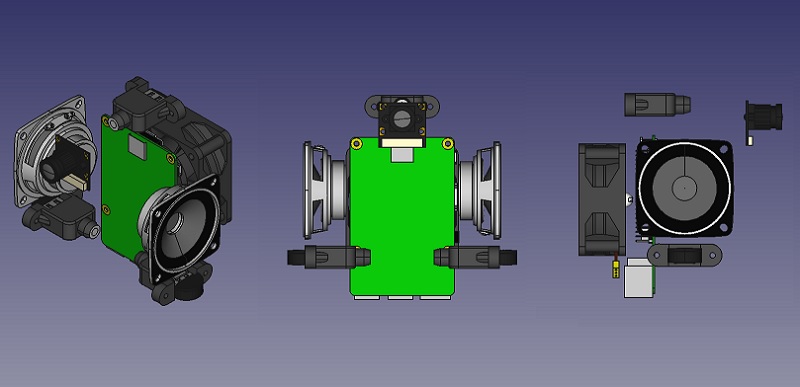
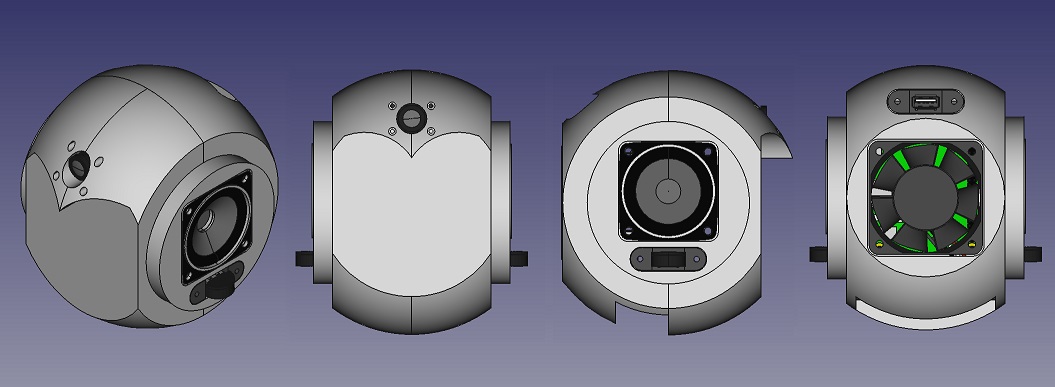
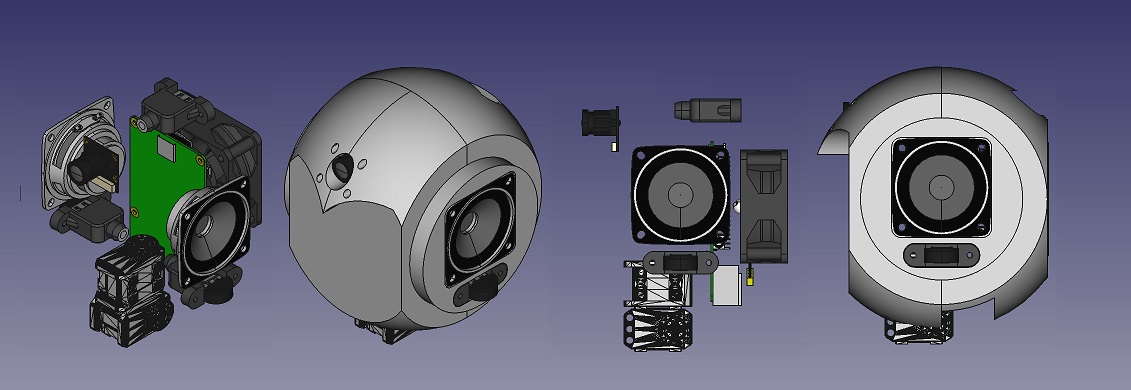
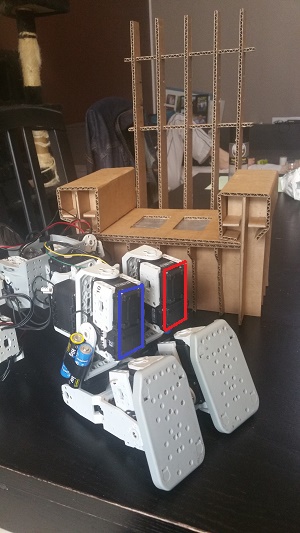
Le tout à été imprimer en 3d engrenage compris, je posterai les fichier .stl si cela intéresse quelqu'un
Concernant la perte de couple je vais faire un test pour voir si j'ai bien une diminution de moitié
- Amhnemus aime ceci