Lorsque l’on regarde un schéma tel que celui de la Fig.21 par exemple, avec tous ses relais, un moteur, des capteurs à base de « Switchs » pilotés par des cames, on est en droit d’être impressionné et tenté de partir en courant. Rassurez-vous, ce fatras apparent n’est que l’addition de plusieurs sous-schémas très simples. Nous allons analyser pas à pas ces divers circuits de base pour progressivement comprendre un ensemble fonctionnel complet. Je suppose dans ces lignes que les lectrices et les lecteurs ont des connaissances de base sur l’électromagnétisme, c’est à dire la faculté d’un bobinage à créer une attraction magnétique lorsqu’il est parcouru par un courant électrique.
♦ Principe de fonctionnement de la machine.
Dérouler un programme consiste sur la machine de Turing à enchaîner des opérations immuables jusqu’à ce que la fin de l’algorithme soit détectée. Un cycle typique se compose d’une opération de LECTURE impérative, suivie de trois actions éventuelles, mais uniquement si elles sont validées dans la feuille perforée décrivant le programme :
• ÉCRITURE d’un « Blanc », d’un « 0 » ou d’un « 1 » binaire,
• DÉPLACEMENT d’une « case » à droite ou à gauche sur la « bande des données »,
• Changement d’instruction dans la table des transitions.
Ces trois dernières opérations ne se produisent que si elles sont programmées, c’est à dire si un trou est pratiqué à leur place précise dans la feuille de programme.
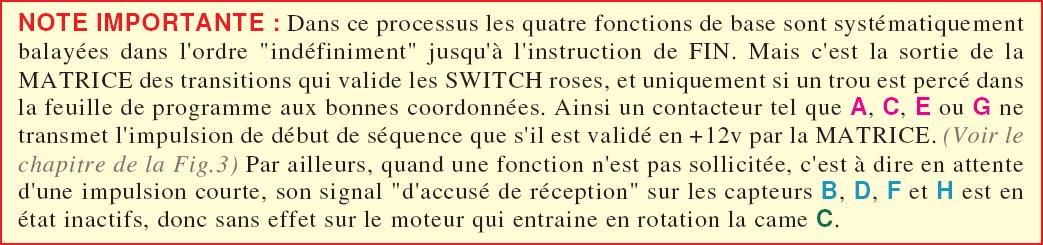
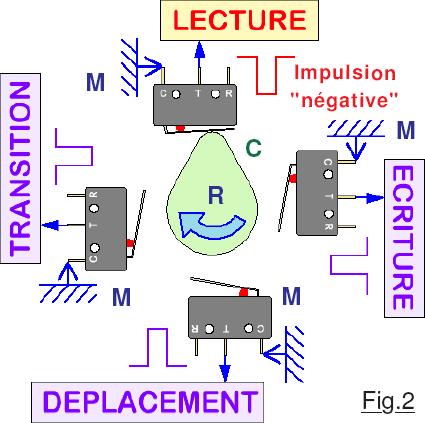 Fonctionnant en « logique négative », l’HORLOGE de la Fig.2 dans son principe de base fait tourner en permanence la came C dans le sens R. Dans ce schéma simplifié on ne se préoccupe pas du tout de l’arrêt de la machine lorsque le programme est arrivé à son terme. Le principe consiste à n’envoyer une courte Impulsion négative sur le module concerné que si la Matrice de programme présente GND en M du micro-contacteur de type Switch. On utilise le vocable de « logique négative », car l’activation du circuit cible se fait sur une « tension logique » nulle, alors qu’en « logique positive » l’impulsion de début serait en +12v.
Fonctionnant en « logique négative », l’HORLOGE de la Fig.2 dans son principe de base fait tourner en permanence la came C dans le sens R. Dans ce schéma simplifié on ne se préoccupe pas du tout de l’arrêt de la machine lorsque le programme est arrivé à son terme. Le principe consiste à n’envoyer une courte Impulsion négative sur le module concerné que si la Matrice de programme présente GND en M du micro-contacteur de type Switch. On utilise le vocable de « logique négative », car l’activation du circuit cible se fait sur une « tension logique » nulle, alors qu’en « logique positive » l’impulsion de début serait en +12v.
REMARQUE : Le pilotage par présence de GND est choisi en fonction de l’agencement général de la logique interne globale de cette machine. Rien n’interdirait d’inverser tous les états logiques.
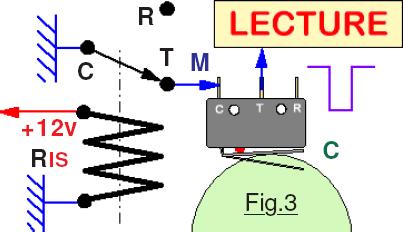 NOTE IMPORTANTE : Par agencement de la MATRICE de programme et du sens des diodes, cette dernière fournit du +12v sur la sortie concernée si l’action doit se produire. Comme le pilotage doit se faire sur le coté « négatif » du relais, il faudrait comme montré sur la Fig.3 inverser les signaux, ce qui imposerait la présence d’un relais RIS d’Inversion de Signal sur chacune des sorties concernées de la Matrice de programme. Pour éviter d’avoir à ajouter ainsi une kyrielle de relais, on se contentera quand c’est possible de ne pas relier la borne positive du relais piloté directement au +12v mais à la sortie de la MATRICE . Du coup, ce relais ne pourra passer au travail que s’il est validé à la fois sur sa connexion positive et réuni à GND par le système de déclenchement des actions. Seul le relais pilotant la LECTURE sera relié directement au +12v car elle est effectuée systématiquement pour chaque instruction.
NOTE IMPORTANTE : Par agencement de la MATRICE de programme et du sens des diodes, cette dernière fournit du +12v sur la sortie concernée si l’action doit se produire. Comme le pilotage doit se faire sur le coté « négatif » du relais, il faudrait comme montré sur la Fig.3 inverser les signaux, ce qui imposerait la présence d’un relais RIS d’Inversion de Signal sur chacune des sorties concernées de la Matrice de programme. Pour éviter d’avoir à ajouter ainsi une kyrielle de relais, on se contentera quand c’est possible de ne pas relier la borne positive du relais piloté directement au +12v mais à la sortie de la MATRICE . Du coup, ce relais ne pourra passer au travail que s’il est validé à la fois sur sa connexion positive et réuni à GND par le système de déclenchement des actions. Seul le relais pilotant la LECTURE sera relié directement au +12v car elle est effectuée systématiquement pour chaque instruction.
♦ Utilisation de l’impulsion d’activation d’une fonction.
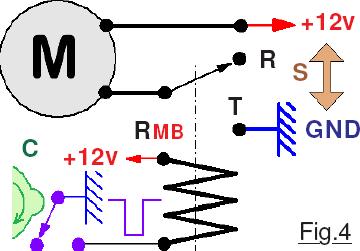 Comme exemple nous allons analyser la séquence qui fait tourner le carrousel d’une position. ce choix est assez représentatif de ce qui se passera un peu partout dans la machine car chaque module fonctionnel aura à gérer un moteur. (Et même deux pour la fonction ÉCRITURE.) Considérons la Fig.4 sur laquelle M représente le moteur qui fait tourner le carrousel. On suppose que la MATRICE de programme valide une rotation du plateau des « pions binaires ». Quand la came C active le Switch, ce dernier envoie donc une courte impulsion d’état GND au relais de Motorisation du Barillet RMB. Durant toute l’impulsion RMB passe en état travail T. Le moteur M est alors alimenté et tourne dans un sens correspondant à la polarité de la tension d’alimentation. Si on désire qu’il tourne dans l’autre sens il suffit de permuter les fils des tensions comme symbolisé par la flèche marron . La durée de l’impulsion qui valide une rotation du plateau est très insuffisante pour changer d’une position angulaire correspondant à une « case du ruban des données ». Il faut donc impérativement allonger la durée d’activation du moteur. Il sera également incontournable de stopper cette rotation dès que le changement de « case » sera effectif.
Comme exemple nous allons analyser la séquence qui fait tourner le carrousel d’une position. ce choix est assez représentatif de ce qui se passera un peu partout dans la machine car chaque module fonctionnel aura à gérer un moteur. (Et même deux pour la fonction ÉCRITURE.) Considérons la Fig.4 sur laquelle M représente le moteur qui fait tourner le carrousel. On suppose que la MATRICE de programme valide une rotation du plateau des « pions binaires ». Quand la came C active le Switch, ce dernier envoie donc une courte impulsion d’état GND au relais de Motorisation du Barillet RMB. Durant toute l’impulsion RMB passe en état travail T. Le moteur M est alors alimenté et tourne dans un sens correspondant à la polarité de la tension d’alimentation. Si on désire qu’il tourne dans l’autre sens il suffit de permuter les fils des tensions comme symbolisé par la flèche marron . La durée de l’impulsion qui valide une rotation du plateau est très insuffisante pour changer d’une position angulaire correspondant à une « case du ruban des données ». Il faut donc impérativement allonger la durée d’activation du moteur. Il sera également incontournable de stopper cette rotation dès que le changement de « case » sera effectif.
♦ Relais avec contact d’auto-maintien.
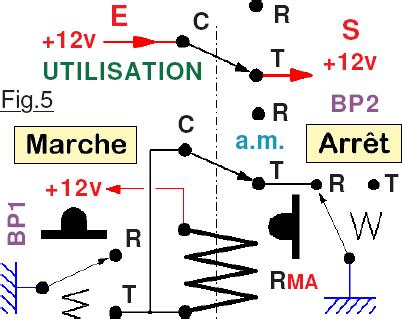 Fondamentale, cette notion est utilisée de façon omniprésente dans les divers schémas électrotechniques architecturés avec des relais. La Fig.5 qui illustre ce propos présente en simplifié le module qui sert à mettre en service ou à stopper la machine. Nombreuses et nombreux sont celles et ceux qui vont penser qu’il suffit de brancher la fiche secteur ou de la retirer de la prise pour effectuer cette manipulation. C’est une fausse bonne idée car on génère des étincelles électriques entre la fiche et la prise qui lentement en dégradent les contacts électriques. Le mieux consiste à utiliser un bloc secteur, et d’interposer un interrupteur pour mettre sous tension. Toutefois, le schéma de la Fig.5 qui se place directement à la sortie du bloc secteur basse tension et qui complète l’interrupteur secteur, présente un avantage incontestable : Celui d’intégrer « naturellement » un bouton d’ARRÊT D’URGENCE. Dès qu’un incident se produit sur la machine, immédiatement on presse le bouton poussoir BP2 d’Arrêt et l’énergie de puissance est spontanément coupée. Le relais Marche / Arrêt repéré RMA présente l’avantage de pouvoir commuter facilement plusieurs ampères sans problème.
Fondamentale, cette notion est utilisée de façon omniprésente dans les divers schémas électrotechniques architecturés avec des relais. La Fig.5 qui illustre ce propos présente en simplifié le module qui sert à mettre en service ou à stopper la machine. Nombreuses et nombreux sont celles et ceux qui vont penser qu’il suffit de brancher la fiche secteur ou de la retirer de la prise pour effectuer cette manipulation. C’est une fausse bonne idée car on génère des étincelles électriques entre la fiche et la prise qui lentement en dégradent les contacts électriques. Le mieux consiste à utiliser un bloc secteur, et d’interposer un interrupteur pour mettre sous tension. Toutefois, le schéma de la Fig.5 qui se place directement à la sortie du bloc secteur basse tension et qui complète l’interrupteur secteur, présente un avantage incontestable : Celui d’intégrer « naturellement » un bouton d’ARRÊT D’URGENCE. Dès qu’un incident se produit sur la machine, immédiatement on presse le bouton poussoir BP2 d’Arrêt et l’énergie de puissance est spontanément coupée. Le relais Marche / Arrêt repéré RMA présente l’avantage de pouvoir commuter facilement plusieurs ampères sans problème.
Examinons maintenant la technique du contact d’auto-maintien objet de ce chapitre. Tous les relais mis en service dans la gestion « informatique » de cette machine sont à deux sections de type contact travail T et contact repos R avec sur cet inverseur piloté un commun C. D’une façon générale l’un de ces contact noté a.m. sur tous les schémas pour le repérer sert précisément à l’auto-maintien. Quand on clique sur BP1 du bouton poussoir Marche le relais RMA passe en état travail et commute toutes ses sections de contacts sélectriques. (Quel qu’en soit le nombre en fonction de modèle employé. Dans notre cas deux sections.) Les autres sections disponibles que l’on qualifiera d’UTILISATION seront branchées librement en fonction de ce que l’on désire obtenir. Dans cet exemple UTILISATION se contente de fournir en sortie S le +12v de puissance au reste de la machine si le bloc secteur est branché et fournit son énergie de basse tension régulée en E. S’il n’y avait pas la section a.m. dès le relâcher de BP1 l’alimentation serait coupée. Mais on constate que a.m. en configuration travail T se substitue à BP1. Sur BP2 c’est le contact repos R que l’on ouvre lors de son activation. Supprimant l’état GND sur la section a.m. du relais RMA , sa bobine n’est plus alimentée et il repasse au repos, inversant simultanément la configuration de l’UTILISATION.
♦ Synchronisation de l’HORLOGE.
 Séduisant de simplicité, l’HORLOGE présentée sur la Fig.2 n’est pas utilisable en l’état. Il importe de comprendre que les diverses opérations qui s’enchaînent exigent des durées très différentes. Ne pas en tenir compte imposerait de passer de l’une à l’autre avec une temporisation qui laisserait à la plus lente le temps de se terminer. En effet, il n’est pas question de passer à une action suivante tant que la précédente n’est pas terminée. Hors, ÉCRITURE ou Changer d’instruction est bien plus long qu’effectuer une LECTURE ou une rotation du barillet. Ce sont ces deux dernières fonctions qui statistiquement seront les plus utilisées. Les ramener en durée à l’opération la plus laborieuse ralentirait exagérément le fonctionnement de la machine. Aussi, on va établir un « dialogue » entre l’horloge de notre ordinateur mécanique et les différents périphériques qui le composent.
Séduisant de simplicité, l’HORLOGE présentée sur la Fig.2 n’est pas utilisable en l’état. Il importe de comprendre que les diverses opérations qui s’enchaînent exigent des durées très différentes. Ne pas en tenir compte imposerait de passer de l’une à l’autre avec une temporisation qui laisserait à la plus lente le temps de se terminer. En effet, il n’est pas question de passer à une action suivante tant que la précédente n’est pas terminée. Hors, ÉCRITURE ou Changer d’instruction est bien plus long qu’effectuer une LECTURE ou une rotation du barillet. Ce sont ces deux dernières fonctions qui statistiquement seront les plus utilisées. Les ramener en durée à l’opération la plus laborieuse ralentirait exagérément le fonctionnement de la machine. Aussi, on va établir un « dialogue » entre l’horloge de notre ordinateur mécanique et les différents périphériques qui le composent.
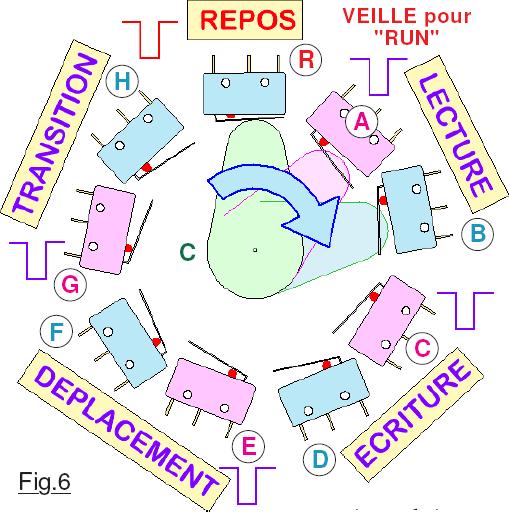
Avec le croquis de la Fig.6 on s’approche d’une solution viable avec prise en compte d’une « poignée de main » entre l’HORLOGE et les autres composantes de la machine. Les divers SWITCH coloriés en rose ont pour fonction d’envoyer les courtes impulsions déclenchant le début d’une séquence fonctionnelle. (Consulter dans le chapitre qui suit la définition proposée pour le vocable de « séquence« .) Quand la machine déroule un programme, le SWITCH de repos R est ignoré. Le moteur qui fait tourner la came C est alimenté et le SWITCH A transmet la courte impulsion au module LECTURE qui commence son activité. Dès que C qui continue à tourner dans le sens de la grosse flèche bleue active le microcontact B la rotation est stoppée. La fonction LECTURE arrivant à son terme repasse en attente et surtout libère B, la came C se remet à tourner. Elle transmet alors le « top départ » au capteur C puis va activer D qui arrête son mouvement. Quand la fonction ÉCRITURE est terminée, elle se met en attente à son tour et libère D, le moteur de l’HORLOGE continuant vers le module suivant. Le processus va se poursuivre jusqu’à ce que le programme trouve l’instruction de FIN de l’algorithme, validant alors le contacteur de repos R. La machine va alors rester en PAUSE jusqu’à ce que l’opérateur valide un nouveau déclenchement de programme.
♦ Dialogue entre modules et terminologie.
Choisir les mots qui seront utilisés dans un descriptif technique n’est pas immédiat, car il faut aboutir à un vocabulaire très précis et acceptable par tous. Pour la suite de ce didacticiel, je vous propose les définitions suivantes en espérant qu’elles seront pertinentes. Pour éviter toute ambiguïté je vais essayer de m’y tenir avec rigueur.
CYCLE : Suite répétée des opérations qui sont enchaînées pour réaliser une instruction, c’est à dire dans l’ordre :
LECTURE / ÉCRITURE / DÉPLACEMENT / TRANSITION. L’unité fonctionnelle qui réalisera cette suite d’actions sera nommée l’HORLOGE.
SÉQUENCE : Déclenchée par l’impulsion de début d’action, réalise la suite ordonnée dans un module du démarrage, suivi de l’action spécifique, puis arrêt en fin d’opération et génération de l’Accusé de Réception qui réactive le moteur de l’HORLOGE.
♦ Surtensions sur les bobinages et diodes de « roue libre ».
 Bien connu des physiciens, un phénomène de surtension inverse à la polarité de la tension actuelle se produit quand brusquement sur un bobinage on coupe l’énergie. Cette surtension inverses est directement fonction du facteur de qualité Q du bobinage et peut facilement faire deux à trois fois la tension initiale. (Donc 36V dans notre cas sur les moteurs, voir plus car leur facteur Q peut atteindre quatre ou cinq.) On se doute que cette surtension inverse n’est pas appréciée de l’électronique, encore que dans notre cas les seules électroniques présentes sont les diodes électroluminescentes. N’oublions pas toutefois le bloc alimentation secteur qui sur sa sortie +12v ne doit pas prendre ces surcharges. La solution pour résoudre cette difficulté est très simple. Il suffit de brancher une diode en polarité inverses de l’alimentation directement sur la bobine. Peu importe du reste qu’il s’agisse du bobinage d’un relais, ou celui d’un moteur à courant continu. Reprenons en Fig.7 le schéma de la Fig.4 sur lequel nous avons ajouté des deux diodes D1 et D2. Noter que pour ces deux composants le branchement est bien en inverse, la cathode étant vers le +12v et l’anode coté négatif GND. Sur ce schéma, le sens de rotation du moteur est fonction de la polarité de son alimentation. Si on désire une rotation réciproque, il suffit de permuter +12v et GND sans oublier alors d’inverser le branchement de la diode D2. En électricité, les diodes de court-circuit des contre-courants sont nommées diodes de roue libre.
Bien connu des physiciens, un phénomène de surtension inverse à la polarité de la tension actuelle se produit quand brusquement sur un bobinage on coupe l’énergie. Cette surtension inverses est directement fonction du facteur de qualité Q du bobinage et peut facilement faire deux à trois fois la tension initiale. (Donc 36V dans notre cas sur les moteurs, voir plus car leur facteur Q peut atteindre quatre ou cinq.) On se doute que cette surtension inverse n’est pas appréciée de l’électronique, encore que dans notre cas les seules électroniques présentes sont les diodes électroluminescentes. N’oublions pas toutefois le bloc alimentation secteur qui sur sa sortie +12v ne doit pas prendre ces surcharges. La solution pour résoudre cette difficulté est très simple. Il suffit de brancher une diode en polarité inverses de l’alimentation directement sur la bobine. Peu importe du reste qu’il s’agisse du bobinage d’un relais, ou celui d’un moteur à courant continu. Reprenons en Fig.7 le schéma de la Fig.4 sur lequel nous avons ajouté des deux diodes D1 et D2. Noter que pour ces deux composants le branchement est bien en inverse, la cathode étant vers le +12v et l’anode coté négatif GND. Sur ce schéma, le sens de rotation du moteur est fonction de la polarité de son alimentation. Si on désire une rotation réciproque, il suffit de permuter +12v et GND sans oublier alors d’inverser le branchement de la diode D2. En électricité, les diodes de court-circuit des contre-courants sont nommées diodes de roue libre.
♦ Inverser le sens de rotation d’un moteur.
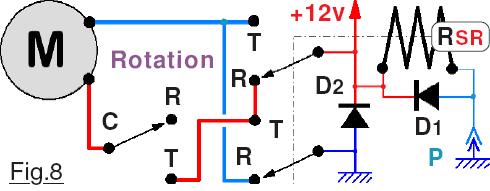 Grand classique en électrotechnique, quand on désire faire tourner un moteur dans les deux sens de rotation possibles, il suffit de « croiser » ses deux fils d’alimentation, opération aisée en utilisant un relais équipé de deux sections de type R / T. La Fig.8 présente le schéma classique assurant la fonction de croisement, architecture de base dans laquelle on a ajouté les deux diodes de roue libre D1 et D2. Il importe de noter que D2 est placée avant « le croisement » des lignes électriques, ainsi sa polarité correcte est assurée quel que soit le sens de rotation au moment de la coupure d’énergie. C’est par l’alimentation ou non du relais de Sens de Rotation de l’arbre moteur RSR que l’on pilotera en option horaire ou antihoraire. Par contre, pour piloter le mouvement de Rotation ou le stopper un autre relais tel que celui de la Fig.4 sera indispensable et complètera le circuit électrique du module concerné. Le sens de rotation sera piloté en P. Si GND est appliqué au relais RSR le moteur tournera dans un sens, si le « point froid » de ce relais est isolé, le sens de rotation sera inversé. (« Point froid » : Coté négatif d’alimentation du bobinage.)
Grand classique en électrotechnique, quand on désire faire tourner un moteur dans les deux sens de rotation possibles, il suffit de « croiser » ses deux fils d’alimentation, opération aisée en utilisant un relais équipé de deux sections de type R / T. La Fig.8 présente le schéma classique assurant la fonction de croisement, architecture de base dans laquelle on a ajouté les deux diodes de roue libre D1 et D2. Il importe de noter que D2 est placée avant « le croisement » des lignes électriques, ainsi sa polarité correcte est assurée quel que soit le sens de rotation au moment de la coupure d’énergie. C’est par l’alimentation ou non du relais de Sens de Rotation de l’arbre moteur RSR que l’on pilotera en option horaire ou antihoraire. Par contre, pour piloter le mouvement de Rotation ou le stopper un autre relais tel que celui de la Fig.4 sera indispensable et complètera le circuit électrique du module concerné. Le sens de rotation sera piloté en P. Si GND est appliqué au relais RSR le moteur tournera dans un sens, si le « point froid » de ce relais est isolé, le sens de rotation sera inversé. (« Point froid » : Coté négatif d’alimentation du bobinage.)
Notons au passage que les deux sections R / T du relais RSR sont consommées pour croiser les fils d’alimentation du moteur. Si ce relais est piloté par une impulsion courte, il faudra lui ajouter un deuxième compère pour le contrôler en P et disposer ainsi d’un auto-maintien.
♦ Stopper « net » un moteur électrique.
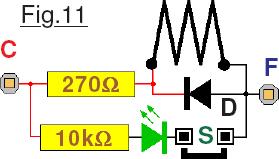
Comprendre l’agencement d’un schéma et une approche technologique est directement lié à une connaissance assez précise des caractéristiques présentées par les composants sélectionnés pour la conception d’un système quel qu’il soit. Aussi, je vous invite fortement à consulter l’encadré situé en haut de la Page 6 relatif aux caractéristiques des petits moteurs réducteurs.
Nous désirons stopper les cames des fonctionnalités de cette machine à des positions angulaires précises. Par exemple la hauteur des pions du barillet de la mémoire RAM est optimisée avec exactitude sur ordinateur pour avoir des dépassements respectivement de 3mm, de 11,5mm et de 20mm. Le problème issu de la technologie est le suivant : Dès que l’on coupe l’alimentation du moteur, par inertie du rotor et des engrenages, ce dernier continue de tourner et l’arrêt n’est pas immédiat. L’arbre de sortie continue de tourner d’un angle non dérisoire d’environ 5° sur les unités approvisionnées. Ce phénomène, s’il n’est pas maitrisé, est catastrophique car les positions en hauteur des pions du barillet seront relativement aléatoires et dans des proportions inacceptables.
Heureusement pour nous une solution simple existe : Les « contre courants induits. »
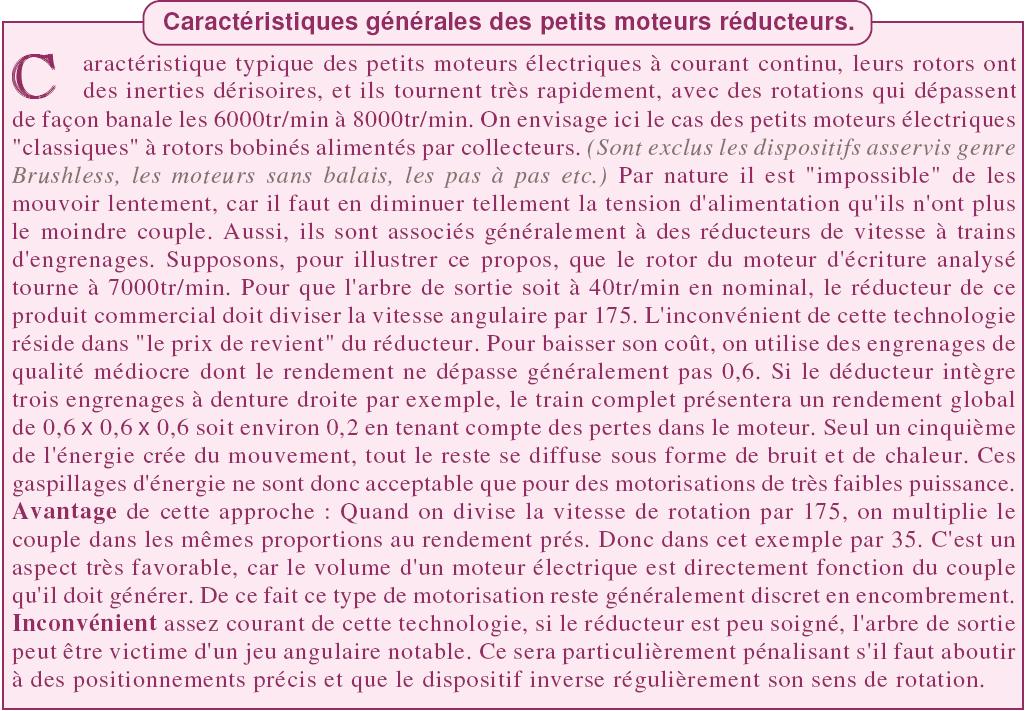
 Une toute petite liaison électrique ajoutée au schéma de la Fig.8 pour aboutir à celui de la Fig.9 apporte une solution royale pour résoudre ce problème. Quand le relais qui alimente le moteur en énergie passe au repos, on observe que le contact R de sa section UTILISATION force le moteur en court-circuit. Le rotor continue de tourner dans le champ magnétique de l’inducteur constitué d’aimants permanents. Les bobinages deviennent alors générateurs d’électricité et produisent un « contre courant » qui freine énergiquement tout l’équipement en rotation, train d’engrenages compris. Dans le schéma de la Fig.9 le moteur est stoppé net par ces « contres courants« . On peut se demander si la présence de la diode D2 est bien utile. La réponse est oui, car le passage de R à T dans la section Rotation engendre dans le transitoire l’ouverture du circuit électrique, et de ce fait génère la surtension de coupure de flux magnétique.
Une toute petite liaison électrique ajoutée au schéma de la Fig.8 pour aboutir à celui de la Fig.9 apporte une solution royale pour résoudre ce problème. Quand le relais qui alimente le moteur en énergie passe au repos, on observe que le contact R de sa section UTILISATION force le moteur en court-circuit. Le rotor continue de tourner dans le champ magnétique de l’inducteur constitué d’aimants permanents. Les bobinages deviennent alors générateurs d’électricité et produisent un « contre courant » qui freine énergiquement tout l’équipement en rotation, train d’engrenages compris. Dans le schéma de la Fig.9 le moteur est stoppé net par ces « contres courants« . On peut se demander si la présence de la diode D2 est bien utile. La réponse est oui, car le passage de R à T dans la section Rotation engendre dans le transitoire l’ouverture du circuit électrique, et de ce fait génère la surtension de coupure de flux magnétique.
Notons au passage que l’inversion du sens de rotation par une commande en P est aussi « nerveuse » ce qui fait que le positionnement de la came entraînée sera aussi précis sur inversion du sens de rotation que sur arrêt du moteur. Nous pourrions penser que ces fins de mouvements ou inversion de sens sont brutales et vont malmener les moteurs. Il n’en est rien. Pour se convaincre consultez la fiche de Validation de la motorisation (2/2) précisant les tests d’endurances effectués.
 ♦ Appels de courant au démarrage.
♦ Appels de courant au démarrage.
Encore une caractéristique bien connue des moteurs à courant continu. Quand ils tournent, les contres courants générés par le rotor tournant dans le flux magnétique du stator limitent l’intensité absorbée par le moteur. Mais au démarrage, seule la résistance ohmique de l’enroulement qui reste faible limite le courant de démarrage. Il en résulte une surintensité de l’ordre de trois fois à cinq fois la valeur du courant nominal quand la vitesse est stabilisée.
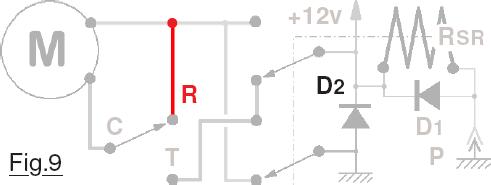
Comme précisé sur le Fig.10 on peut limiter cet appel de courant en ajoutant une résistance R sur la la ligne d’alimentation. La valeur de ce composant n’aura strictement aucun effet sur l’arrêt franc du moteur. Son influence sur la position d’inversion du sens de rotation est également dérisoire. En revanche, plus la valeur de R est élevée, moins la surtension sera virulente. La consommation en phase stabilisée sera également plus faible. Toutefois, la « nervosité » du démarrage sera plus faible et la came tournera plus lentement. Aussi, la valeur ohmique de R sera déterminée expérimentalement pour obtenir un compromis optimal en fonction des modules concernés.
 ♦ Visualiser l’état d’un relais et tension de bobinage 5Vcc.
♦ Visualiser l’état d’un relais et tension de bobinage 5Vcc.
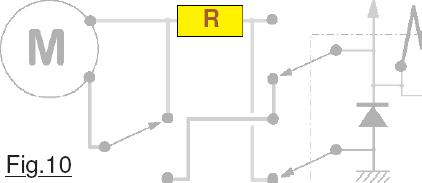
Dernier chapitre consacrés aux « fondamentaux » de l’électromécanique qui vont directement influencer la conception des circuits électriques, la sélection des composants de cette machine résulte de nombreuses contraintes tant économiques que matérielles. Il résulte de ces choix que les divers moteurs utilisés fonctionnent en 12Vcc, tension nominale imposée sur la fourniture en énergie basse tension disponible à la sortie du bloc secteur 220V». En revanche, les relais miniatures équipés de deux sections de type R / T sont prévus pour fonctionner en 5Vcc. Pour éviter d’ajouter à l’ensemble un régulateur qui partant du +12Vcc fournirait du 5Vcc, il a été estimé plus conforme à l’esprit des années 1940, d’ajouter une résistance de 270Ω en série avec la bobine du relais. Par ailleurs, nous sommes en présence d’une machine expérimentale. À ce titre on doit pouvoir visualiser l’intégralité des divers états des systèmes critiques de cette dernière, et en particulier savoir si les relais sont alimentés ou non. Dans ce but, comme le montre la Fig.11 on ajoute une diode électroluminescente en parallèle sur le « point chaud » C et sur « le point froid » F de pilotage de la bobine du relais. Indépendante de la couleur de la LED, la résistance qui sous 12V en limite le courant sera de 10kΩ aboutissant à un éclairage correct. Sauf cas singulier, on retrouvera sur chaque relais de la logique interne de notre machine :
• La diode de « roue libre » D,
• La résistance de 270Ω pour abaisser à 5V la tension sur le bobinage d’induction,
• Une LED témoin de l’état d’alimentation du relais. (Ne s’allume que si C et F sont polarisés.)

♦ Déclenchement et fin d’une opération dans le cycle d’HORLOGE.
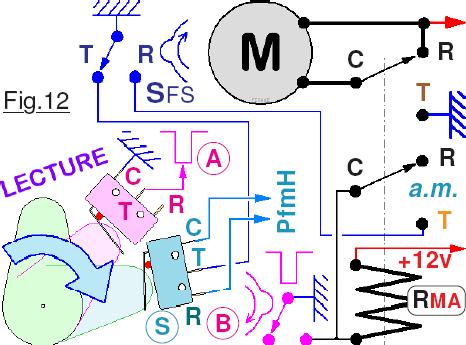
Technologiquement, les quatre opérations qui se succèdent dans un cycle d’HORLOGE partagent un ADN commun pour des raisons d’homogénéité des signaux à échanger entre les diverses unités de la machine. Toutes sont animées par un bloc Moteur / Réducteur. Le principe de base pour établir une poignée de main entre deux modules fonctionnels de notre « ordinateur mécanique » est ébauché sur le schéma de la Fig.12 qui doit être associée à la Fig.6 qui montrait que pour chaque poste deux Switch servent de capteurs pour gérer un cycle. (Ébauché car chaque fonctionnalité présentera des particularités.) Sur ce dessin le Switch de déclenchement d’un début de cycle est représenté physiquement en A et dans le schéma en B. (C’est le même composant.) Il importe de retenir pour la suite, que le Swich SFS qui signale la Fin de Séquence en cours sera en configuration travail quand le module concerné est en ATTENTE d’un déclenchement. Par ce choix technique, le coté R du capteur SFS fournira alors l’état GND sur le Point froid du moteur d’HORLOGE repéré PfmH sur le dessin. Supposons que l’on vient d’amorcer manuellement le début du déroulement d’un programme, ou que la came de l »HORLOGE vient activer T. Immédiatement le relais Marche / Arrêt RMA passe au travail T et le moteur du module LECTURE se met à tourner. Simultanément le contact a.m. passe au travail T assurant l’auto-alimentation du relais RMA. La came de l’HORLOGE et l’implantation du Switch A sont conçus pour que l’impulsion « courte » de déclenchement de séquence soit d’une durée suffisante pour que la came du module concerné tourne d’un angle apte à libérer son Switch SFS qui passe alors au repos R. Le contact T de a.m. continue d’être polarisé à GND alors que la came de l’HORLOGE continue de tourner dans le sens de la grosse flèche bleue. Le signal de déclenchement en T se coupe. Puis cette came active en le Switch S qui passe au travail. Son contact T est alors en liaison avec SFS qui étant au repos R ne fournit plus GND. Le moteur de l’HORLOGE va alors attendre que SFS repasse au travail. Le module en activité réalise son opération spécifique et termine sa séquence en revenant sur SFS pour le faire basculer sur T. Le contact T de a.m. n’étant plus au potentiel de GND le relais RMA repasse au repos et le module restera en ATTENTE d’un nouveau déclenchement. Le contact T de SFS polarise à nouveau T de S et le moteur de l’HORLOGE va alors enchaîner le cycle suivant. Cette approche chronologique combine à la fois des états logiques sur les divers relais, et surtout une durée calibrée pour l’impulsion « courte » de déclenchement des séquences. (La Fig.12 a été clonée pour éviter d’avoir à tourner la page durant la lecture.)
La suite est ici : 02) Schéma électrotechnique du module de rotation du carrousel..


