Journée faste car on va commencer à préparer au bureau d’étude de la salle S2 quelques éléments mécaniques qui vont constituer la structure définitive du petit explorateur martien. Les électroniciens ont bien travaillé. Le circuit électronique principal est achevé. L’ordinateur de bord de JEKERT est enfin dans son élément naturel. Nous sommes plus de trois jours en avance sur le planning prévisionnel, c’est tout bon pour le moral. Dès que les dessinateurs auront terminés leurs plans, les « mécanos » vont usiner les pièces en S5, et l’on pourra enfiler les gants blancs pour assembler les nouveaux éléments sur JEKERT.
Préparation de la plaque qui supporte le multiplexeur.
Terminer entièrement cette pièce est absolument vital pour pouvoir réellement débuter l’intégration. Sur le prototype il a été procédé à de multiples montages/démontages, inévitable quand on crée à partir de rien. On y va progressivement, pas à pas ce qui oblige souvent à déposer des organes pour pouvoir percer de nouveaux trous sur une plaque, ajouter un connecteur etc. La gestation du projet a demandé plus de sept mois. Pour les lecteurs de ce didacticiel c’est différent. Il vous suffit de prendre en compte l’intégralité de la solution possible et dès le début de terminer chaque élément avant de l’ajouter sur la structure. Donc, la première chose à faire consiste à terminer la petite plaque support du multiplexeur 10 qui se visse sur le châssis par les boulons ØM3 repérés 2 sur la Fig.174 qui représente l’état actuel de la sonde. Pour percer tous les trous il faut déposer cette plaque, donc commencer par libérer les petits boulons ØM2 en 1 qui supportent le multiplexeur 7. En réalité, vous l’avez bien compris, sur la photographie qui montre JEKERT retournée sens dessus dessous, la plaque 10 est terminée et remontée sur le châssis.
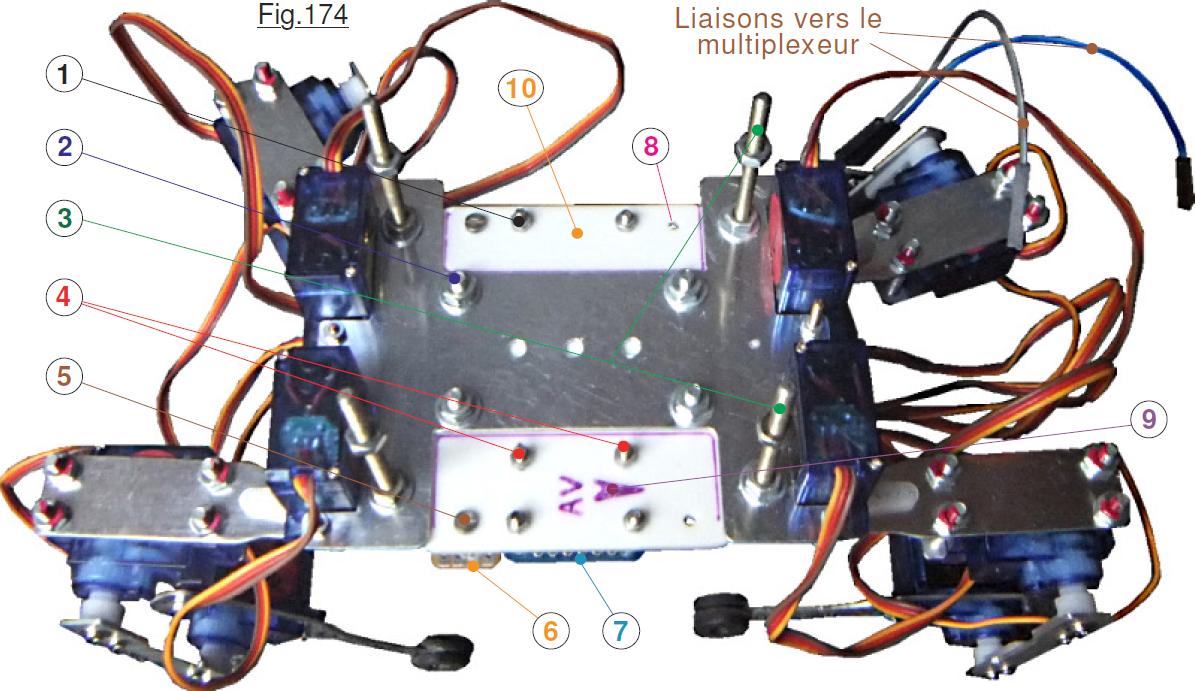
 (Remarquez que pour faciliter le travail sur le dessous, les Tibias et les Griffes ont été placés manuellement vers le dessus de la sonde. Donc sur le dessous de l’image puisque JEKERT est retournée.) On distingue en 8 les deux trous pour la traversée de boulons ØM2 qui serviront à supporter le petit circuit imprimé du luxmètre non encore défini. En 5 on distingue les petits boulonsØM2 qui soutiennent le circuit imprimé 6 du condensateur de 470µF. Notez au passage qu’en 9 on trouve le tracé du contour du châssis et le sens de remontage de ce dernier. Le contour servait à vérifier que les divers trous soient assez éloignés du châssis pour ne pas que les écrous et les rondelles n’interfèrent matériellement avec ce dernier. Quand au sens, sachez que la symétrie des divers éléments mécaniques n’est pas parfaite, aussi repérez systématiquement pour chaque élément son orientation. (C’est à dire où se trouve l’avant et le dessus.) On retrouve facilement sur cette image les quatre boulonsØM3 longs 3 qui forment la structure rigide reliant le châssis avec le circuit imprimé principal et avec le bouclier. Enfin en 4 on constate la présence de deux petits boulons ØM2 qui servent à assurer la liaison entre 10 et le connecteur de la boussole statique.
(Remarquez que pour faciliter le travail sur le dessous, les Tibias et les Griffes ont été placés manuellement vers le dessus de la sonde. Donc sur le dessous de l’image puisque JEKERT est retournée.) On distingue en 8 les deux trous pour la traversée de boulons ØM2 qui serviront à supporter le petit circuit imprimé du luxmètre non encore défini. En 5 on distingue les petits boulonsØM2 qui soutiennent le circuit imprimé 6 du condensateur de 470µF. Notez au passage qu’en 9 on trouve le tracé du contour du châssis et le sens de remontage de ce dernier. Le contour servait à vérifier que les divers trous soient assez éloignés du châssis pour ne pas que les écrous et les rondelles n’interfèrent matériellement avec ce dernier. Quand au sens, sachez que la symétrie des divers éléments mécaniques n’est pas parfaite, aussi repérez systématiquement pour chaque élément son orientation. (C’est à dire où se trouve l’avant et le dessus.) On retrouve facilement sur cette image les quatre boulonsØM3 longs 3 qui forment la structure rigide reliant le châssis avec le circuit imprimé principal et avec le bouclier. Enfin en 4 on constate la présence de deux petits boulons ØM2 qui servent à assurer la liaison entre 10 et le connecteur de la boussole statique.
Le support du compas magnétique de route.
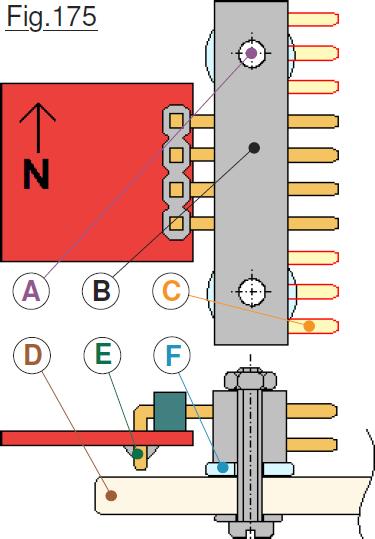
Depuis le TOME 3 nous savons vaguement qu’il est glissé en dessous du multiplexeur comme le montre la Fig.117, on ne peut pas dire que c’est suffisant pour comprendre les détails de son intégration. Le but de ce chapitre est de clarifier la situation sur ce point. Considérons la Fig.175 qui présente la boussole vue de dessus et de profil. En D se trouve le support du multiplexeur. Pour ne pas que les picots soudés E ne buttent sur D ce qui inclinerait le petit module, il faut utiliser un connecteur HE14 femelle à double rangées de lyres B. Ainsi en prenant les picots du haut on surélève le circuit. C’est insuffisant, raison pour laquelle on intercale une rondelle épaisse F. On retire avec une petite pince les 12 lyres telles que C pour dégager les extrémités. Pour immobiliser le connecteur B on le perce en A par des trous de diamètre 2,4mm. Il suffit alors de percer deux trous de passage des vis de liaison sur la plaque D de support du multiplexeur et du C.I. du condensateur de 470µF.
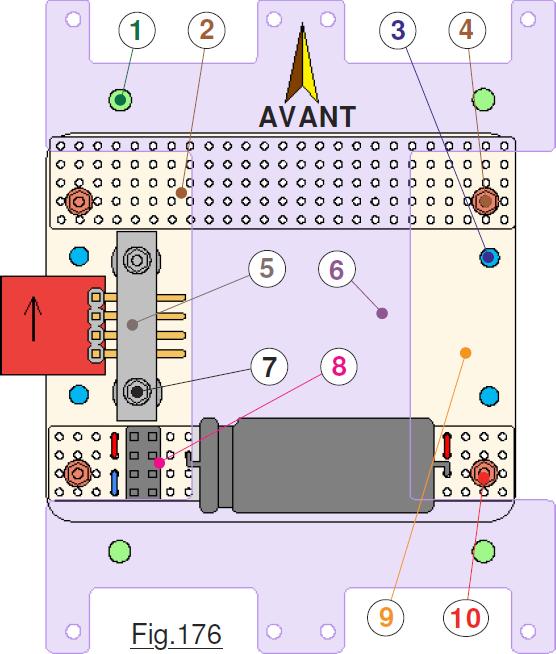
L’épure de la Fig.176 résume assez bien les divers perçages à prévoir sur le support du multiplexeur 9 immobilisé sur le châssis 6 par les longues vis de structure 1 qui servent à solidariser le circuit imprimé principal et le bouclier. Sur cette photographie la plaque 9 est représentée comme si elle était translucide, laissant entrevoir le châssis 6. En 3 se trouvent les petits boulons ØM2 qui soutiennent le module du multiplexeur. La boussole doit se trouver assez à l’extérieur pour pouvoir l’insérer ou la retirer assez facilement du connecteur HE14 repéré 5. Il faut placer le support 5 bien centré entre les vis 3 pour rendre aisées les manipulions de la boussole. Ce centrage détermine la position des deux trous de passage des vis de liaison 7 au diamètre ØM2. Sans que le circuit imprimé de complément 2 ne soit actuellement défini, ces deux boulons de liaison 4 sont au même écartement que ceux en 10 du circuit imprimé 8 dont on remarque sur le dessus un connecteur HE14 double rangées qui reçoit la ligne électrique du cordon ombilical d’alimentation en puissance des douze servomoteurs.
Installer la plaque supportant le multiplexeur.
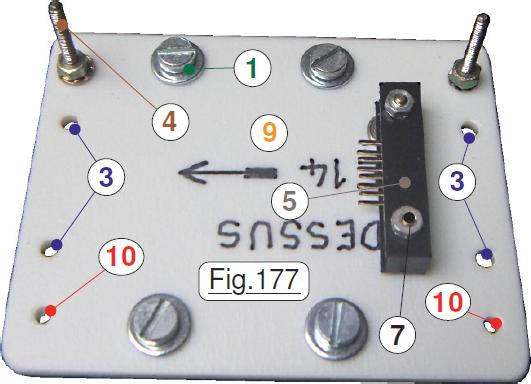
Forcément l’une des toutes premières phases de l’intégration des systèmes puisqu’elle supporte tout ce qui se trouve sur le dessus, et n’autorise la mise en place du circuit imprimé principal que lorsque tout ce qui dépasse sur le dessous est en place. C’est à dire que le connecteur de la boussole et les quatre petits boulons ØM2 4 supportant les circuits 2 et 8 sont immobilisés sur 9. La plaque 9 entièrement percée est montrée sur la Fig.177 avec tous les repères identiques à ceux du dessin précédent. Notez qu’il est conseillé de mettre les deux petits boulons 4 en place avant d’installer la plaque 9 sur le châssis 6, c’est plus facile. Pour le moment ne pas immobiliser définitivement le multiplexeur car pour brancher la ligne sur 5 il faudra l’écarter de la plaque 9. Portons un petit regard sur Image 27.JPG qui présente la plaque en cours de finition. Vous pouvez vérifier que les trous sont assez éloignés du contour du châssis, il n’y aura aucun problème pour le passage des vis et des rondelles d’appui.
 Bien qu’assembler la plaque 9 sur le châssis par ses quatre petits boulons courts ØM3 pourrait sembler évident, concrètement c’est une opération assez délicate qui mérite patience et surtout de bien préparer le travail. Tous les servomoteurs sont débranchés du multiplexeur. L’ensemble des Jambe a été écarté de la zone d’intervention, mais forcément se trouve en position de vulnérabilité, sans compter que régulièrement un Tibia ou une Griffe se positionnera exactement dans l’espace pour masquer un trou de passage ou la vis sur laquelle on tente désespérément de placer un écrou. N’oubliez pas que l’insecte mécanique sera retourné dans l’une des deux mains, et qu’avec l’autre il faudra déplacer la petite visserie, les pinces, les clefs de serrage. Bref, il faut avoir des mains de sage-femme ! Aussi, installez-vous confortablement, soignez l’éclairage et armez-vous de patience, car le minuscule écrou ØM2 qui vous échappe va ricocher sur le parquet et aller se cacher malicieusement sous le meuble le plus éloigné. (Si, si, je vous assure que c’est ce qui va se passer. Du coup mon épouse est contente, car pour retrouver le précieux écrou en question j’ai entièrement fait le ménage de la pièce et en particulier sous les meubles … et je n’ai pas retrouvé ce scongregneugneu d’écrou ØM2 !) Bon, restons ZEN et observons sur la Fig.178 la préparation initiale du sous-ensemble juste avant de l’intégrer définitivement sur la structure.
Bien qu’assembler la plaque 9 sur le châssis par ses quatre petits boulons courts ØM3 pourrait sembler évident, concrètement c’est une opération assez délicate qui mérite patience et surtout de bien préparer le travail. Tous les servomoteurs sont débranchés du multiplexeur. L’ensemble des Jambe a été écarté de la zone d’intervention, mais forcément se trouve en position de vulnérabilité, sans compter que régulièrement un Tibia ou une Griffe se positionnera exactement dans l’espace pour masquer un trou de passage ou la vis sur laquelle on tente désespérément de placer un écrou. N’oubliez pas que l’insecte mécanique sera retourné dans l’une des deux mains, et qu’avec l’autre il faudra déplacer la petite visserie, les pinces, les clefs de serrage. Bref, il faut avoir des mains de sage-femme ! Aussi, installez-vous confortablement, soignez l’éclairage et armez-vous de patience, car le minuscule écrou ØM2 qui vous échappe va ricocher sur le parquet et aller se cacher malicieusement sous le meuble le plus éloigné. (Si, si, je vous assure que c’est ce qui va se passer. Du coup mon épouse est contente, car pour retrouver le précieux écrou en question j’ai entièrement fait le ménage de la pièce et en particulier sous les meubles … et je n’ai pas retrouvé ce scongregneugneu d’écrou ØM2 !) Bon, restons ZEN et observons sur la Fig.178 la préparation initiale du sous-ensemble juste avant de l’intégrer définitivement sur la structure.
L’ordre d’assemblage des éléments qui s’impose pour rendre l’opération aussi aisée que possible aboutit au protocole suivant :
On a réalisé la ligne électrique X qui se branche sur le connecteur HE14 de la boussole dédié sur le circuit imprimé principal à la ligne de 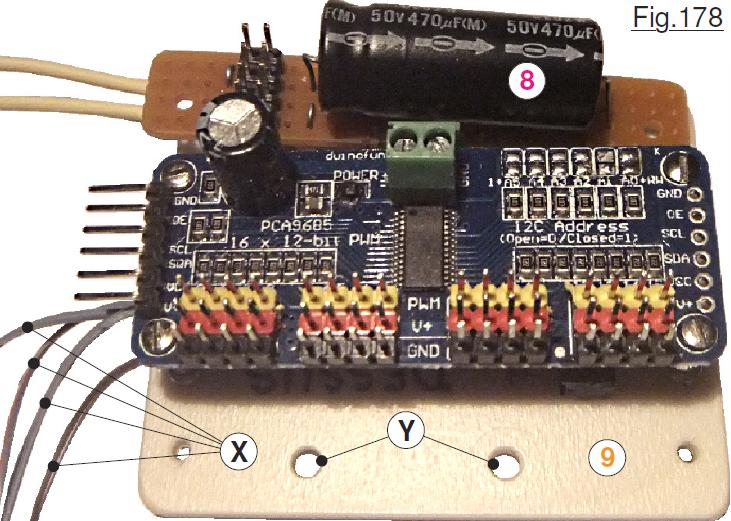 dialogue I2C. Pour le moment, en 8 le module du condensateur est flottant, et le multiplexeur aussi car il faut pouvoir les soulever légèrement pour passer les vis et les rondelles ØM3 de fixation de la plaque 9 sur le châssis 6. JEKERT retournée, on place 9 sur le châssis en prenant soin à ce que les vis de liaison ne ressortent pas des trous Y. Sur le châssis on place les rondelles, les écrous ØM3 et l’on peut enfin procéder au serrage de ces derniers. Le dessous étant pour le moment accessible, on va dans l’ordre placer la visserie 10 et immobiliser le circuit imprimé 8. Puis dans la foulée on termine la liaison rigide du module multiplexeur. On peut également assembler les deux petits boulons ØM2 en 4 qui supporteront 2. OUF, nous avons bien avancé. Les deux photographies Image 28.JPG et Image 29.JPG doivent ressembler assez à ce que vous avez obtenu sauf que le fil inutile GND n’est pas présent chez vous. Quand à celui du +5Vcc qui va vers la mesure de tension sur A7 vous l’avez remplacé par un tout petit fil électrique, ça va sans dire !
dialogue I2C. Pour le moment, en 8 le module du condensateur est flottant, et le multiplexeur aussi car il faut pouvoir les soulever légèrement pour passer les vis et les rondelles ØM3 de fixation de la plaque 9 sur le châssis 6. JEKERT retournée, on place 9 sur le châssis en prenant soin à ce que les vis de liaison ne ressortent pas des trous Y. Sur le châssis on place les rondelles, les écrous ØM3 et l’on peut enfin procéder au serrage de ces derniers. Le dessous étant pour le moment accessible, on va dans l’ordre placer la visserie 10 et immobiliser le circuit imprimé 8. Puis dans la foulée on termine la liaison rigide du module multiplexeur. On peut également assembler les deux petits boulons ØM2 en 4 qui supporteront 2. OUF, nous avons bien avancé. Les deux photographies Image 28.JPG et Image 29.JPG doivent ressembler assez à ce que vous avez obtenu sauf que le fil inutile GND n’est pas présent chez vous. Quand à celui du +5Vcc qui va vers la mesure de tension sur A7 vous l’avez remplacé par un tout petit fil électrique, ça va sans dire !
Les bigoudis : Tournicoti tournicoton.
À ce stade de l’intégration des systèmes, il devient important de rebrancher les douze liaisons électriques entre les servomoteurs et le module multiplexeur. Tenter d’intégrer le circuit imprimé principal confine également à une opération assez délicate. Si les diverses liaisons des servomoteurs sont libres, elles brassent l’air et accrochent constamment tout obstacle se trouvant à leur portée dans leur environnement. Il suffit pour éviter ces phénomènes de rebrancher les petits connecteurs HE14. Hors cette opération impose de la pondération, car ils sont les uns sur les autres. Aussi, pour ne pas avoir à réitérer cette manipulation, contrairement à ce qui a été fait chronologiquement sur le prototype, nous allons immédiatement offrir une permanente à JEKERT et soigner ainsi son élégance. « Coiffer » les lignes filaires qui vont vers les moteurs consiste à les raccourcir au maximum tout en leur laissant la souplesse indispensable aux mouvements mécaniques. Pouvant assurer
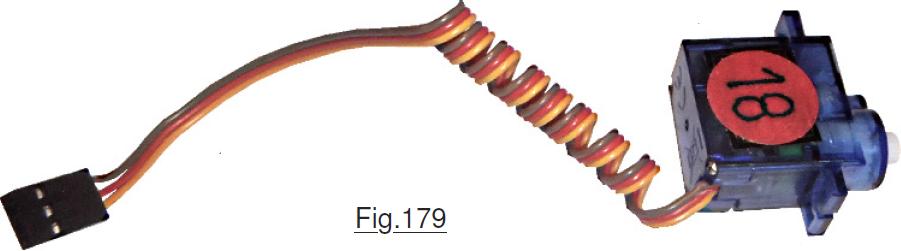 des pointes de courant notables, les lignes qui alimentent les petits servomoteurs SG90 sont semi rigides. Si l’on effectue un pliage court, elles le conservent. Pour qu’en application de robotique elles puissent ne pas trop gêner les mouvements mécaniques, il faut leur laisser une longueur suffisante et les relier à la machine par une ample boucle plus ou moins courbe. L’encombrement en pâtit. Une solution très simple est possible puisque ces conducteurs électriques conservent une « mise en plis ». Comme montré sur la Fig.179 le secret réside dans la queue de cochon. La ligne électrique est devenue courte et ne brasse plus l’air comme un sémaphore, tout en conservant une souplesse parfaitement opérationnelle.
des pointes de courant notables, les lignes qui alimentent les petits servomoteurs SG90 sont semi rigides. Si l’on effectue un pliage court, elles le conservent. Pour qu’en application de robotique elles puissent ne pas trop gêner les mouvements mécaniques, il faut leur laisser une longueur suffisante et les relier à la machine par une ample boucle plus ou moins courbe. L’encombrement en pâtit. Une solution très simple est possible puisque ces conducteurs électriques conservent une « mise en plis ». Comme montré sur la Fig.179 le secret réside dans la queue de cochon. La ligne électrique est devenue courte et ne brasse plus l’air comme un sémaphore, tout en conservant une souplesse parfaitement opérationnelle.

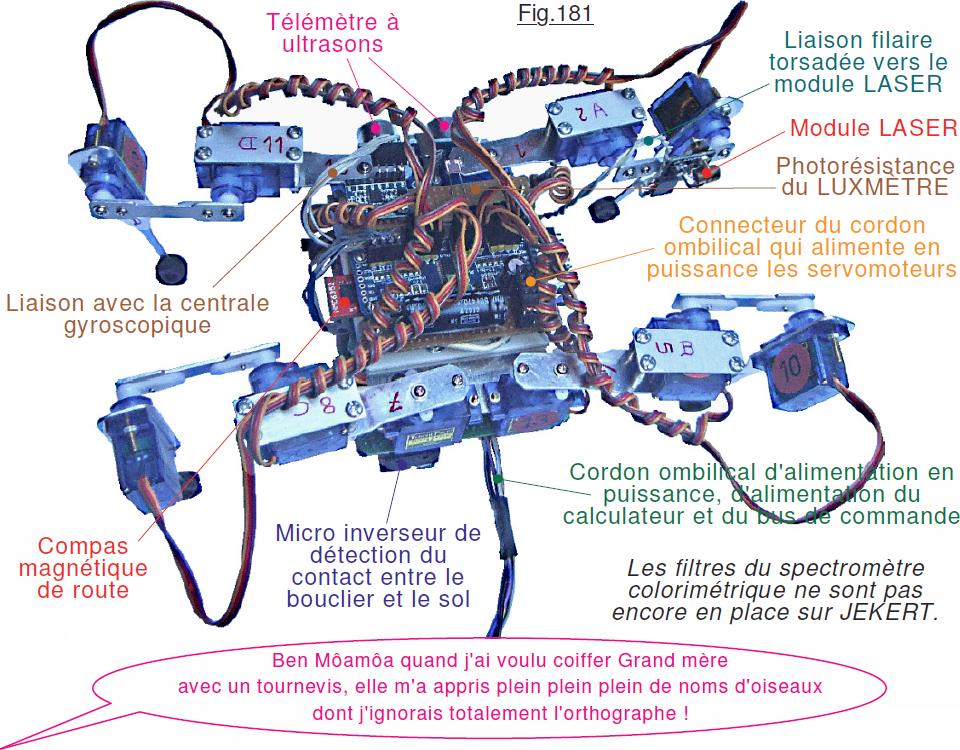
 Coiffer les clientes avec un tournevis fait partie des méthodes ultramodernes que l’on rencontre quand on fréquente une enseigne de marque branchée pour VIP. JEKERT manifestement en fait partie puisque la « presse people » de la Fig.180 montre comment on procède. Choisir comme en 1 un quelconque outil terminé par une tige cylindrique longue et fine. On enroule le fil tel que 5 sur un diamètre faible ce qui engendre des courbures rémanentes. La sonde est confortablement installée sur le bocal 4 sur son bouclier. Pour votre machine, ce sera sur le châssis dégagé dessous, puisque bouclier et circuit imprimé principal ne sont pas encore en place. À bien y regarder, on va constater que la petite machine comporte trois sortes de liaisons électriques différentes. Celles comme 2 qui vont des Hanches au multiplexeur. Les moteurs sont immobiles sur la structure. De ce fait elles n’ont pas besoin de souplesse. On les bobinera sur pratiquement toute leur longueur pour les « tasser et les recroqueviller » le plus possible sur la machine. Moins elles dépassent de la structure, moins il y aura de risque d’interférence avec les organes mobiles. Puis on trouve les moteurs des Fémurs. Ils occupent dans l’espace une position intermédiaire. Leurs lignes hélicoïdales seront courbées en une sorte d’arche pour les ponter sur le dessus de la sonde. Boudiner de cette façon les fils allant aux SG90 des Genoux ne conviendrait pas. En effet, les moteurs qui animent les Griffes sont un peu « loin ». La ligne enroulée, inévitablement finirait par se mélanger avec les spires de celle des Fémur. Pour contourner cette difficulté, la solution consiste, comme visible en 3, à passer le fil de liaison à l’intérieur du « tuyau » que constitue la ligne torsadée du Fémur. Pratiquement terminée, sur la Fig.181 JEKERT est en VEILLE.
Coiffer les clientes avec un tournevis fait partie des méthodes ultramodernes que l’on rencontre quand on fréquente une enseigne de marque branchée pour VIP. JEKERT manifestement en fait partie puisque la « presse people » de la Fig.180 montre comment on procède. Choisir comme en 1 un quelconque outil terminé par une tige cylindrique longue et fine. On enroule le fil tel que 5 sur un diamètre faible ce qui engendre des courbures rémanentes. La sonde est confortablement installée sur le bocal 4 sur son bouclier. Pour votre machine, ce sera sur le châssis dégagé dessous, puisque bouclier et circuit imprimé principal ne sont pas encore en place. À bien y regarder, on va constater que la petite machine comporte trois sortes de liaisons électriques différentes. Celles comme 2 qui vont des Hanches au multiplexeur. Les moteurs sont immobiles sur la structure. De ce fait elles n’ont pas besoin de souplesse. On les bobinera sur pratiquement toute leur longueur pour les « tasser et les recroqueviller » le plus possible sur la machine. Moins elles dépassent de la structure, moins il y aura de risque d’interférence avec les organes mobiles. Puis on trouve les moteurs des Fémurs. Ils occupent dans l’espace une position intermédiaire. Leurs lignes hélicoïdales seront courbées en une sorte d’arche pour les ponter sur le dessus de la sonde. Boudiner de cette façon les fils allant aux SG90 des Genoux ne conviendrait pas. En effet, les moteurs qui animent les Griffes sont un peu « loin ». La ligne enroulée, inévitablement finirait par se mélanger avec les spires de celle des Fémur. Pour contourner cette difficulté, la solution consiste, comme visible en 3, à passer le fil de liaison à l’intérieur du « tuyau » que constitue la ligne torsadée du Fémur. Pratiquement terminée, sur la Fig.181 JEKERT est en VEILLE.
La suite est ici.


