Effectivement.. Non, plus de caméra RPI car on peux en brancher qu'une par la ptite nappe, et l'IR chauffe à fond.
Je me dis que ce genre de caméra (openmv ou opencmu) serait plus adapté pour la vision stéréoscopique, de plus je peux les brancher en I2C ^^
Donc 320 x 240 cela peut être suffisent apparemment, histoire de conserver aussi une certaine fluidité au niveau de la vision.
Par contre je n'ai pas trouvé de données technique plus précise sur cette cam (openmv) c'est ballot.
https://openmv.io/do...m/quickref.html
Hop, je met ça de coter et j'espère pouvoir me les prendre le moi prochain ^^
Merci, si tu a d'autres suggestions, idées etc suis preneur.
Encore merci ^^
PS : je pensais à un truc, lors de tes tests sur le sujet, tu n'avais pas un problème pour calculer la distance, ou plutôt limiter sur la porté (distance max ou mini) ??
Et donc, en ajoutant un servo à chaque cam sur l'axe Z, cela ne pourrait il pas aider sur la convergence des points de chaque cam pour calculer justement cette distance sans être limité ???
(ou je dis une connerie)
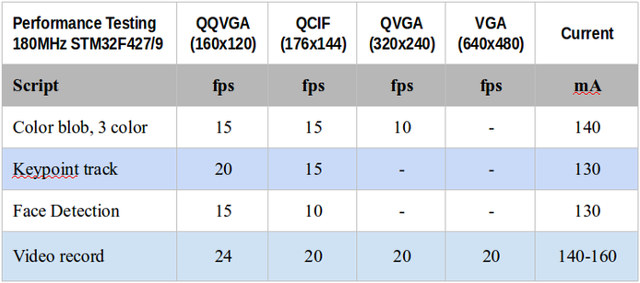
OpemMV camera specifications:
- MCU – STM32F427, 180MHz, 225 DMIPS, 256K SRAM, 2M Flash, DMA/FPU/DSP/DCMI/SDIO/2D Acceleration
- Camera – 2MP OV2640 sensor with interchangeable M12 lens, 2x IR LEDS
- Storage – uSD interface: SDIO (4-bit mode)
- Expansions – 2x headers with USART, SPI, I2C, PWM, ADC/DAC, GPIOs, PWM and power signals
- USB – micro USB 2.0 Full Speed port
- Power Supply – 5V via USB; Current draw is approximately 140mA, steady state
- Dimensions – 4.57 x 3.56 cm
Some possible applications include:
- Face detection – Send a picture when someone ring the bell at your door
- Marker Detection – Detects a sign on an object
- Color detection – Sort M&M’s by colors;
- Landing zone detection – For your drone;
- Record video
- Time lapse – For security, science, fun, etc…
- Control Pan/Tilt servos to track objects / faces
- Machine vision education
Si ça peut aider.
Les performances n'ont pas l'air fameuse ?!!
Edit 14 : 00 : en fouinant un peu je tombe sur ce projet Hicat livera, qui, d'après les caractéristiques risque fortement de surpasser la pixi ou l'openMV
https://www.kickstar...ion/description
Modifié par Oliver17, 15 octobre 2016 - 05:50 .