
C'est pas mal ton système de cage pour maintenir ton biped! Tu peux faire tes tests sans t'embêter avec l'équilibre pour l'instant.

137 réponses à ce sujet
#62

Path
-
- Modérateur
-

- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 19 mars 2017 - 10:01
J'ai pas le choix. Avec le poids de tout ce qu'il a sur lui, il ne ne tient pas debout seul. C'est bien pratique au final.
#63
Oracid
-

- Modérateur
-
- 6â¯769 messages
Pilier du forum
- Gender:Male
Posté 20 mars 2017 - 07:14
Mais, je me trompe ou je vois de la visserie en nylon ?
Super boulot !
Super boulot !
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#64
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 20 mars 2017 - 08:11
Merci  C'est bien des petites visses en nylon pourquoi ? Avant les visses, c'est des entretoises avec une visse M2. C'est les plus petites que ma quincaillerie possède.
C'est bien des petites visses en nylon pourquoi ? Avant les visses, c'est des entretoises avec une visse M2. C'est les plus petites que ma quincaillerie possède.


#66
Oracid
-
- Modérateur
-
- 6â¯769 messages
Pilier du forum
- Gender:Male
Posté 20 mars 2017 - 09:58
Parce que le nylon est moins lourd que l'acier.Merci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#67
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 02 avril 2017 - 05:22
Toujours à vouloir le mieux que je puisse faire, pour piloter les servos, j'ai voulu tester les 3 alternatives à ma disposition.
1. servo.h.
La commande des servos est reliée directement à l'arduino. On pilote les servo directement en angle. J'ai rencontré des problèmes d'amplitude que je n'avais pas quand j'ai testé les servos. J'ai eu aussi des problèmes avec la reproductibilité et des mouvements non désirés ou incomplets. Pour ce dernier point, je suppose que j'ai un code qui complique la vie de servo.h. Je n'utilise pas d'interruptions pour Emile et je n'ai pas encore mis le doigt sur ce qui gène servo.h. Mais décidément, je n'aime pas cette lib. Comme je ne changerai pas mon code pour faciliter la vie de cette lib, j'ai testé digitalWrite.
2. digitalWrite() <- Il ne faut pas
Sans débrancher les servos de l'arduino, j'ai testé cette commande d'abord sans changer la fréquence. Les servos émettaient des vibrations et commençaient à chauffer. J'ai vite arrêté. J'ai joué rapidement avec les fréquences pour voir ce que cela donne. Je n'atteins pas les 50Hz et surtout, je ne veux assumer les conséquences sur la commande delay(). C'est déjà assez compliqué comme ça. Alors j'ai voulu reprendre le driver 16 servos.
3. le driver 16 servo.
Celui du shop et que Jekert a testé. Comme il est limité à 10A, je l'utilise uniquement en générateur de signaux PWM. Je n'utilise pas sa partie alimentation.
NB. Pour avoir une fréquence la plus proche de 50Hz, la valeur donné dans le soft et de 53.

NB. Dans le servo, je retrouve la masse du driver via l'alimentation. Le convertisseur 12V-5V relie les masses.
Il faut que j'ajoute le driver au sac à dos d'Emile. Et vu que je n'utilise plus les broches pour les servos, je me suis demandé si je pouvais pas revenir à un arduino plus petit un micro ou un nano. Mais non. Mon code et les libs (Wire Adafruit_GFX Adafruit_SSD1306 SPI Adafruit_Sensor Adafruit_BNO055 Adafruit_PWMServoDriver) dépassent la capacité de petits modèles arduino.
A ce stade (https://github.com/Path000/emile) j'en suis à 33% de la mémoire du mega.
#68
Mike118
-

- Administrateur
-
- 9â¯969 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 02 avril 2017 - 06:52
Hum ... Les 10 A c'est si tu passe par le bornier... Tu peux directement te brancher sur une prise pour servo, et si tu veux assurer le coup tu étames les pistes tu drivers, ( juste rajouter de l'étain sur les piste masse et 5V =) )
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#69
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 02 avril 2017 - 07:41
C'est une bonne idée. Mais c'est risqué, non ? je suis pas un expert en soudure. C'est tout petit et c'est recouvert d'une pellicule. Je crois même que retirer la pellicule c'est risqué. Je me trompe peut être.
#70
Mike118
-
- Administrateur
-
- 9â¯969 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 02 avril 2017 - 07:48
Personnellement je n'estime pas ça risqué. Tant que tu fais ça avec rien de connecté si jamais tu débordes un coup de tresse à dessouder ou de pompe à dessouder et la moindre bavure disparaît ni vu ni connu. =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#71
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 02 avril 2017 - 08:37
Du coup, je sais pas si on parle de la même chose.
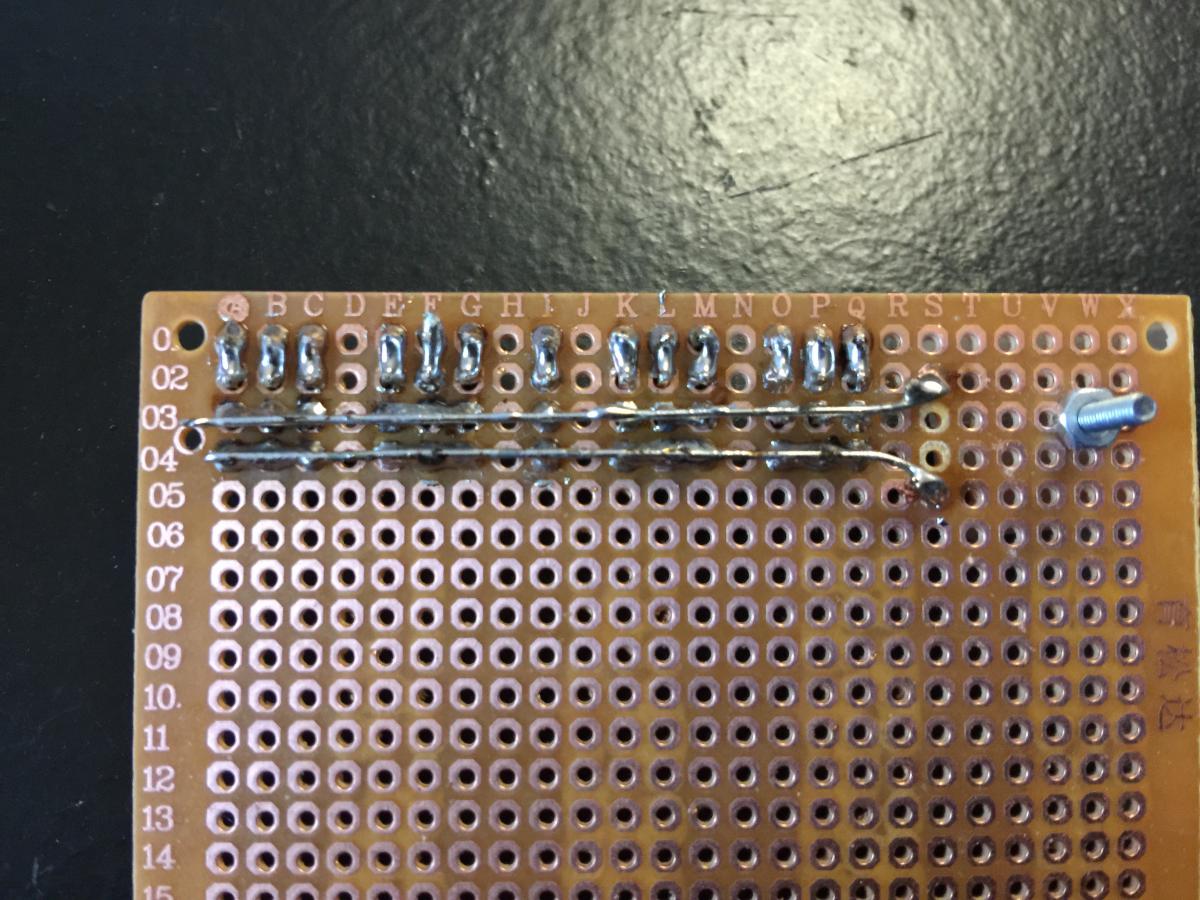
Perso, le risque je le vois aussi sur le grattage. Je vois pas comment faire. La piste V+ passe sur le dessus du circuit imprimé sous les plots.
Voir les images déjà postées là : http://www.robot-maker.com/forum/topic/11106-cest-emile/?p=78613
Je peux peut-être faire avec un mono brin par dessus. Comme j'ai déjà fait là. ça porte un nom cette technique ?
#72
Oracid
-
- Modérateur
-
- 6â¯769 messages
Pilier du forum
- Gender:Male
Posté 03 avril 2017 - 07:04
Je pense que oui, mais je ne le connais pas.ça porte un nom cette technique ?
Il y a fort longtemps, je faisais ce genre de montage en soudant du fil de wrapping.
Je pense que c'est beaucoup plus facile et efficace. C'est un électronicien chevronné qui m'avait montré cette technique.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#73
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 03 avril 2017 - 08:48
Le wrapping, héhé souvenir J'ai fait ça une fois à l'école. Il faut des pattes plutot longues.
Je vais appeler ma technique peu académique : le pont. Ou la technique du court-ju volontaire. ou la technique du je me fais plaisir avec la soudure, la fameuse JMPPP. J'en mets plein plein plein.
J'ai fait ça une fois à l'école. Il faut des pattes plutot longues.Je vais appeler ma technique peu académique : le pont. Ou la technique du court-ju volontaire.
ou la technique du je me fais plaisir avec la soudure, la fameuse JMPPP. J'en mets plein plein plein.
#74
Oracid
-
- Modérateur
-
- 6â¯769 messages
Pilier du forum
- Gender:Male
Posté 03 avril 2017 - 12:59
Non, non ! Pas du tout ! Je ne te dis pas de faire du wrapping, mais de faire des connexions en soudant du fil de wrapping.Le wrapping, héhé souvenir
Je peux te dire que j'ai soudé des forêts de fils de cette manière et que c'est vraiment très efficace pour faire du prototype.
C'est vrai qu'à l'époque, c'était perchlo et insoleuse obligatoire, c'était un peu lourd, alors avec ce système, c'était beaucoup plus facile.
Si j'ai un peu de temps, je vais chercher un exemple dans mon grenier.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#75
Oracid
-
- Modérateur
-
- 6â¯769 messages
Pilier du forum
- Gender:Male
Posté 03 avril 2017 - 06:56
Voilà de quoi je parle. Attention, c'est du collector, là ! 

Ma chaine YouTube : https://www.youtube..../oracid1/videos
#76
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 03 avril 2017 - 07:08
Ha oui quand même j'ai jamais fait ça mais pourquoi pas
j'ai jamais fait ça mais pourquoi pas
#77
Oracid
-
- Modérateur
-
- 6â¯769 messages
Pilier du forum
- Gender:Male
Posté 03 avril 2017 - 08:08
Ce n'est pas moi qui ai mis au point cette technique, c'est tous les membres d'un ancien club scientifique.Ha oui quand même
Et là, c'est rien, j'ai vu des cartes avec des forêts de fils.
La technique est simple, tu règles une pince à dénudé une bonne fois pour toute, tu dénudes le fil sur environ 2mm et tu le plantes dans la soudure.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#78
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 09 avril 2017 - 10:42
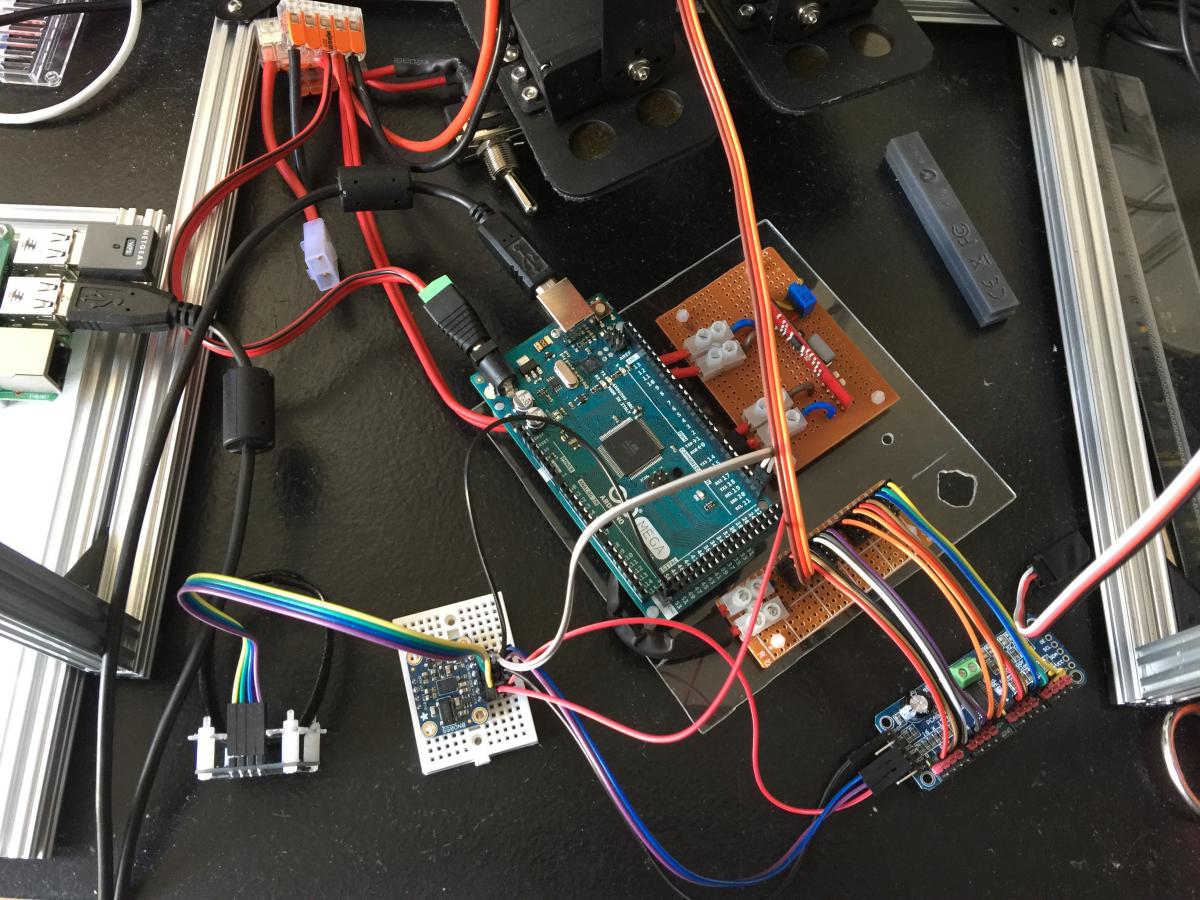
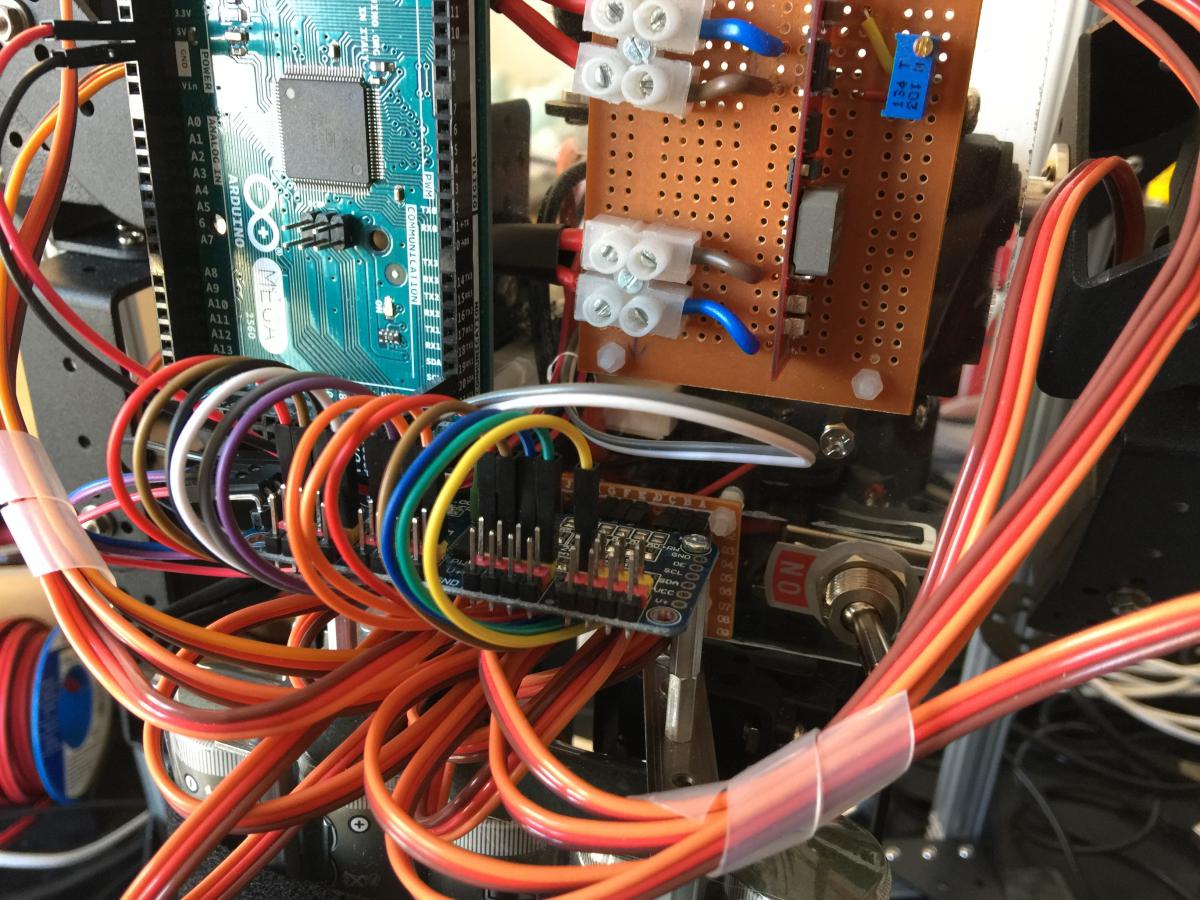
J'ai poursuivi dans l'optique tout I2C (écran, BNO, driver PWM), tel que imaginé plus haut.
Là, les servos sont branchés pour leur alimentation sur la petite carte fait maison. Celle-ci relie chaque servo au driver PWM qui ne sert que de générateur d'impulsions.
J'ai ajouté une petite fonction "repos" à l'interface de commande (NodeJS pour les intimes ).
Coté logiciel, encore rien d'automatique. Je joue avec la commande pour trouver les étapes des mouvement de marche à venir.
Le code est toujours mis à jour ici : https://github.com/Path000/emile
C'était aussi le moment de vérité : est-ce que les servos supportent le poids du robot ? Oui !!  Je précise aussi que alimentés avec ces grosses batteries les servos rigidifient suffisamment le robot pour tenir sur une jambe pliée
Je précise aussi que alimentés avec ces grosses batteries les servos rigidifient suffisamment le robot pour tenir sur une jambe pliée  C'est de bon augure pour la suite !!
C'est de bon augure pour la suite !!
Et, comme un point d'étape, après le montage, voilà à quoi ressemble la plateforme de dev.

- Oliver17 aime ceci
#80
Path
-
- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 09 avril 2017 - 04:04
Merci Je te le fais dire, vivement que ça bouge !!
Ce sera le 2eme moment de vérité. S'il tient sur une jambe, faut qu'il se redresse ^^
Pour qu'il bouge de manière fluide, je vais m'inspirer des danses de mon Bob : http://www.robot-maker.com/forum/topic/10644-le-ptit-bob-de-path-complet/page-2#entry72156








0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




