Bien que chronologiquement c’est l’action LECTURE qui sera traitée dans le début d’un cycle d’horloge, nous allons étudier le schéma de la fonction ÉCRITURE car c’est la première qui a été menée à son terme après la fonction de rotation du carrousel. (Et par voie de conséquence donné lieu à la rédaction des fiches et du didacticiel qui sont menés en parallèle avec les études et la réalisation du prototype.) Ce n’est pas la facette la plus simple à comprendre, car elle comporte deux moteurs à gérer simultanément, le schéma étant réparti sur trois circuits imprimés dont deux sont identiques. Avant de commencer l’analyse du schéma on va décrire le comportement attendu.
♦ Prendre de la hauteur.
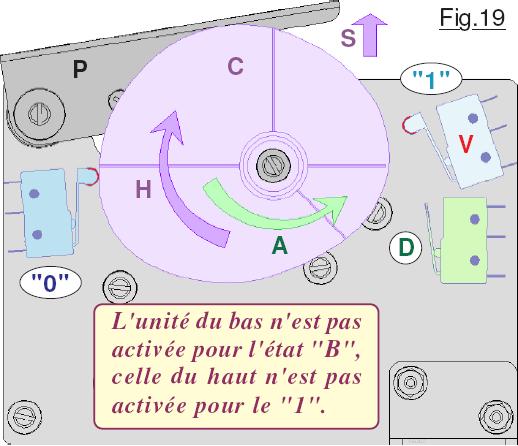 Nous savons que pour effectuer une opération d’écriture si elle est validée par le programme, le module du dessus et le module du dessous doivent déplacer le pion concerné à trois hauteurs différentes en fonction de l’état binaire à concrétiser. Pour l’état « 0 » ces déplacements combinés entre l’unité du haut et celle du bas devront en outre être coordonnées. Enfin, quand l’écriture est effectuée, la palette P doit être ramenée en position dégagée. Sur la Fig.19 on observe l’unité fonctionnelle du dessous. Seuls les deux Switch correspondant à « 0 » et « 1 » sont sollicités dans deux sens de rotation de façon un peu « nerveuse », raison pour laquelle ils sont munis d’une petite roulette. Pour soulever le pion avec la palette P dans le sens S la came quitte le Switch de dégagement D en tournant dans le sens horaire H. Le moteur n’est mis en mouvement que si l’une des deux écritures logiques est validée dans le programme.
Nous savons que pour effectuer une opération d’écriture si elle est validée par le programme, le module du dessus et le module du dessous doivent déplacer le pion concerné à trois hauteurs différentes en fonction de l’état binaire à concrétiser. Pour l’état « 0 » ces déplacements combinés entre l’unité du haut et celle du bas devront en outre être coordonnées. Enfin, quand l’écriture est effectuée, la palette P doit être ramenée en position dégagée. Sur la Fig.19 on observe l’unité fonctionnelle du dessous. Seuls les deux Switch correspondant à « 0 » et « 1 » sont sollicités dans deux sens de rotation de façon un peu « nerveuse », raison pour laquelle ils sont munis d’une petite roulette. Pour soulever le pion avec la palette P dans le sens S la came quitte le Switch de dégagement D en tournant dans le sens horaire H. Le moteur n’est mis en mouvement que si l’une des deux écritures logiques est validée dans le programme.  Supposons dans cet exemple que l’algorithme prévoit l’écriture d’un « 1« . Le Switch validé V reçoit du +12V depuis la MATRICE. (S’il n’y a pas d’erreur de perforation l’une seule des trois options sera découpée dans la feuille du programme.) Quand la came C active « 0« , il ne se passe rien car le Switch n’est pas alimenté. Continuant à tourner, C « clique » sur « 1 » qui immédiatement doit inverser le sens de rotation car le pion est à la bonne hauteur. Tournant dans le sens antihoraire A la came repart jusqu’à solliciter le Switch de fin de séquence D. Immédiatement le moteur doit stopper, car c’est la configuration dégagée qui ménage la libre rotation pour le barillet du carrousel.
Supposons dans cet exemple que l’algorithme prévoit l’écriture d’un « 1« . Le Switch validé V reçoit du +12V depuis la MATRICE. (S’il n’y a pas d’erreur de perforation l’une seule des trois options sera découpée dans la feuille du programme.) Quand la came C active « 0« , il ne se passe rien car le Switch n’est pas alimenté. Continuant à tourner, C « clique » sur « 1 » qui immédiatement doit inverser le sens de rotation car le pion est à la bonne hauteur. Tournant dans le sens antihoraire A la came repart jusqu’à solliciter le Switch de fin de séquence D. Immédiatement le moteur doit stopper, car c’est la configuration dégagée qui ménage la libre rotation pour le barillet du carrousel.
♦ Le circuit de base.
Avant d’envisager le coordination des deux modules symétriques, nous allons par une approche très progressive élaborer le schéma pour l’unité du bas, sachant que pour celle du dessus le circuit électrotechnique est strictement identique. La seule différence au point de vue électrique réside dans le câblage des Switch « 0 » et « B » pour l’unité du haut et « 0 » et « 1 » pour celle du bas. La deuxième différence concerne l’aspect mécanique. Les deux sous-ensembles sont des clones, mais celui de dessus est en miroir par rapport à celui de dessous, un peu comme si la platine du haut se reflétait dans un lac pour renvoyer l’image du dessous. Du coup, certaines pièces comme la came C ou la palette P sont réalisées symétriquement, raison pour laquelle le didacticiel est accompagné de deux modèles C pour l’imprimante 3D. La plaque verticale du corps d’un module étant plate, celle de dessus et celle de dessous sont strictement identiques.
On ignorera Fig.21 la présence des diodes de roue-libre ainsi que celle des LEDs d’états. Sur ce schéma le 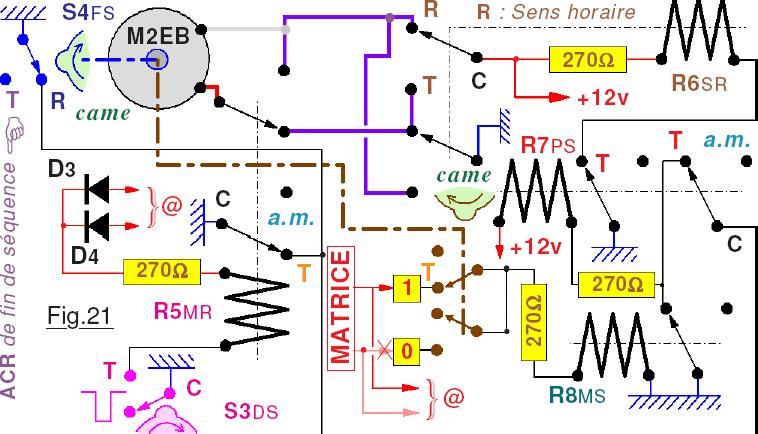 trait mixte épais bleu représente l’action de la came sur le Switch S4FS alors que la ligne coudée marron est relative à l’action de la même came sur les trois capteurs recevant de la MATRICE le +12v si une écriture est programmée. Le point chaud de R5MR est donc « alimenté en @ par le programme ». L’HORLOGE fait passer au travail un court instant S3DS, la durée étant suffisante pour que la came libère S4FS qui passe au repos R. Le relais R5MR reste à l’état travail grâce à la section CT sur son contact d’a.m. Le moteur M2EB tourne dans le sens horaire. Quand le Switch « 0 » est activé, il ne se passe rien car ce capteur n’est pas validé par le programme. Dès que la came fait passer le Switch « 1 » au travail, ce que représente T sur le schéma, R8MS s’active et commute R7PS au travail. Immédiatement R6SR bascule sur T et le moteur part en rotation antihoraire. La came libère le Switch « 1« , mais la section CT sur le contact d’a.m. mémorise l’état de R7PS. Le moteur tourne jusqu’à ce que la came réactive S4FS sur T stoppant instantanément M2EB. Palette en configuration dégagée, R7PS décroche car sa section a.m. ne reçoit plus l’état GND. Les diodes D3 et D4 transfèrent le +12v de la MATRICE vers R5MR mais sans le propager entre « 0 » et « 1« .
trait mixte épais bleu représente l’action de la came sur le Switch S4FS alors que la ligne coudée marron est relative à l’action de la même came sur les trois capteurs recevant de la MATRICE le +12v si une écriture est programmée. Le point chaud de R5MR est donc « alimenté en @ par le programme ». L’HORLOGE fait passer au travail un court instant S3DS, la durée étant suffisante pour que la came libère S4FS qui passe au repos R. Le relais R5MR reste à l’état travail grâce à la section CT sur son contact d’a.m. Le moteur M2EB tourne dans le sens horaire. Quand le Switch « 0 » est activé, il ne se passe rien car ce capteur n’est pas validé par le programme. Dès que la came fait passer le Switch « 1 » au travail, ce que représente T sur le schéma, R8MS s’active et commute R7PS au travail. Immédiatement R6SR bascule sur T et le moteur part en rotation antihoraire. La came libère le Switch « 1« , mais la section CT sur le contact d’a.m. mémorise l’état de R7PS. Le moteur tourne jusqu’à ce que la came réactive S4FS sur T stoppant instantanément M2EB. Palette en configuration dégagée, R7PS décroche car sa section a.m. ne reçoit plus l’état GND. Les diodes D3 et D4 transfèrent le +12v de la MATRICE vers R5MR mais sans le propager entre « 0 » et « 1« .
♦ Les Switch de mise en service et de maintenance.

 Respecter avec la meilleure rigueur possible le dépassement en hauteur des pions impose d’ajuster avec précision la position des capteurs « B« , « 0 » et « 1 » pour déterminer l’angle qui engendre l’inversion de rotation du moteur M2EB. Il sera bien commode lors de la mise en service de la machine de pouvoir agir directement sur l’unité en cours de validation. Sur la Fig.22 deux boutons poussoir matérialisés par les micro-Switch PL et Rtr complètent l’agencement de la Fig.21 et fournissent au technicien les aides précisées sur la petite fiche A6 Maintenance matérielle. (12/36)
Respecter avec la meilleure rigueur possible le dépassement en hauteur des pions impose d’ajuster avec précision la position des capteurs « B« , « 0 » et « 1 » pour déterminer l’angle qui engendre l’inversion de rotation du moteur M2EB. Il sera bien commode lors de la mise en service de la machine de pouvoir agir directement sur l’unité en cours de validation. Sur la Fig.22 deux boutons poussoir matérialisés par les micro-Switch PL et Rtr complètent l’agencement de la Fig.21 et fournissent au technicien les aides précisées sur la petite fiche A6 Maintenance matérielle. (12/36)
L’utilité de ces comportements est justifiée sur la fiche Mise en service de la machine. (1/4) et de la fiche Mise en service de la machine. (2/4)
Analysons le fonctionnement : Le moteur est arrêté, la came poussant S4FS au travail. Le relais R5MR est donc à l’état repos. Aucune des trois sorties de la MATRICE n’est activée car la came n’a pas encore quitté T de la configuration « dégagée ». De ce fait R8MS, R7PS et R6SR sont au repos.
On appui sur le Switch PL. Le relais R8MS, étant au repos, son contact R propage GND au point froid de R5MR qui passe au travail. Le moteur se met à tourner dans le sens horaire et S4FS est alors libéré et retourne au repos R. On relâche PL avant que la came n’ait activé l’un des trois capteurs « B« , « 0 » ou « 1« . C’est dans ce cas précis que le temps de basculement d’un contact joue un rôle fondamental dans l’évolution des circuits électromécaniques, ce que ne montrent pas les schémas. Ouvrons donc une parenthèse :

Durant le court laps de temps du transitoire de PL, le contact C se trouve isolé et le relais R5MR n’étant plus autoalimenté par R via D5 repasse au repos. Immédiatement la came s’immobilise dans la position « actuelle ». On peut ainsi par petites actions successives faire tourner pas à pas le moteur M2EB. Supposons maintenant que PL soit appuyé en permanence. Arrive un moment où la came active l’un des trois contacts « B« , « 0 » ou « 1« . (Pour mémoire, quand on effectue ce genre de manipulation, les protocoles imposent que l’une au moins des trois lignes soit alimenté en +12v.) Immédiatement R8MS, et R7PS passent au travail. Le contact R de R8MS se trouve isolé. Le relais R5MR décroche et repasse au repos R. Le moteur M2EB stoppe immédiatement et la came reste en position. C’est bien le comportement attendu. Comment ramener l’unité cible en position dégagée ?
Clic relativement court sur Rtr. Le relais R5MR se réactive et le moteur repart en sens antihoraire, car R7PS a mémorisé l’inversion de sens de rotation par sa section a.m. Quand la came vient à nouveau pousser S4FS au travail T, tous les relais retrouvent l’état non alimenté.
Si on maintien l’enfoncement de Rtr en permanence, le relais R5MR ne se désactive plus et le moteur tourne en permanence. Quand la came active R8MS le sens de rotation s’inverse et le cycle de balayage angulaire se poursuit. S’il n’y avait pas la diode D5, quand S4FS retourne au travail T, GND serait maintenu sur le point froid de R7PS et le sens antihoraire serait permanent. La came irait alors en situation de blocage mécanique de l’ensemble sur le Switch S4FS.

La suite est ici : 04) Schéma électrotechnique de la fonction LECTURE.


