Contenu de Inounx
Il y a 107 élément(s) pour Inounx (recherche limitée depuis 18-mai 13)
Par type de contenu
Voir pour ce membre
#14853 Yop yop
 Posté par
sur 07 mars 2010 - 08:37
dans
Et si vous vous présentiez?
Posté par
sur 07 mars 2010 - 08:37
dans
Et si vous vous présentiez?
#16465 worstation by dremel
Posté par
sur 19 juin 2010 - 12:52
dans
Travail manuel
perso j'ai une colone proxxon et comme toi j'ai le même problème. Quand je descend la perceuse elle se décale légèrement vers la manette. ça doit être un problème sur ce genre de petites colonnes qui ne sont pas de grande qualité. (Ce genre d'outil coute cher en général) Après moi comme je m'en sers exclusivement pour percer des circuits imprimés je fait pas des trous profonds et sa me pose pas trop de problème mais c'est vrai que c'est pas génial...
Un gars qui a eu le meme problème sur la proxxon :
http://www.rcgroups.com/forums/showthread.php?t=608804
Enfin juste pour dire que ce n'est pas que dremel...
#17452 worstation by dremel
Posté par
sur 21 juillet 2010 - 06:41
dans
Travail manuel
Un quadrupède qui saute et qui court ? intéressant ^^ j'ai hate de voir ce que ça peut donnerJe suis toujours sur mon projet de quadrupède, le 4ème de sa génération (détail dans réalisation et projet), ainsi j'avais concocté une bonne idée de châssis pour supporter les servos des pattes afin qu'il ne rendent pas mon quadrupède haut sur patte (du moins pas trop grand), le prototype de châssis d'une patte était parfait mais a pris beaucoup de temps à réaliser (du fait des tests fait dessus), j'ai ainsi par la suite voulu faire les autres pattes en m'aidant de la colonne de perçage DREMEL qui m'aurait permis d'aller un peu plus vite, en fait pas du tout, j'ai plus passé du temps à réparer cette colonne qu'à réaliser mon robot

En fait depuis le début je suis toujours freiné par une question mécanique, les plans, la théorie, tout est plus ou moins au point, mais je bloque sur la construction du châssis
En réalité cette 4ème génération est très particulière, elle utilise 2 nouvelles trouvailles, la première sont des pattes arrières permettant quand j'aurais suffisamment la bête en main que le robot puisse courir et même sauter, la seconde est liée puisqu'elle consiste à fabriquer une colonne vertébrale à 3 segment qui permettrait au robot d'utiliser son propre poids dans la course ou le saut et ainsi de bénéficier de l'effet "pendule" de son train arrière pour ramener ses pattes arrière vers l'avant.(mais ça c'est juste un projet à long terme un !
)
 . On a plus l'habitude des quadrupèdes qui avancent pas bien vite...
. On a plus l'habitude des quadrupèdes qui avancent pas bien vite...Je dirais que le forum est fait pour ça ^^ et puis même si on te pose pas de questions tu peux quand meme nous tenir au courant de tes avancées, je suis sûr qu'il y a plein de monde que sa interesse ^^Je ne compte pas faire tout sur le même robot en même tant (sinon moi j'ai pas fini !) mais je tient à faire une version qui me permettrait par le suite de l'améliorer sans pour autant tout démonter.
Voila quoi, je ne tient surtout pas à faire un quadrupède juste comme ça, pour le fun, j'y travail et ça me passionne, c'est pour moi une manière de m'impliquer dans quelque chose et d'y travailler comme dans le métier dans lequel je souhaiterais travailler.
désolé si la réponse est longue mais ça fait longtemps que quelqu'un ne m'a pas posé de question sur l'avancé de mon projet
on attends la suite, maintenant que ta dremel est opérationnelle
#17427 worstation by dremel
Posté par
sur 20 juillet 2010 - 05:36
dans
Travail manuel
par curiosité quand tu dis que tu veux faire des pièces en série, c'est pour un robot quelconque ou rien à voir ?
#15103 Utiliser les capteurs UltraSons de mon vieux Cybot
Posté par
sur 27 mars 2010 - 12:39
dans
Hack mod customisations et autres modifications
Regarde par ici, un site qui recense les différentes parties de Cybot avec leur schémas : Cybot
Il y a une partie Sonar I/O qui correspond à la carte qui gère l'Ultrason. il ne te reste plus qu'à lire et à comprendre ^^
#15116 Utiliser les capteurs UltraSons de mon vieux Cybot
Posté par
sur 27 mars 2010 - 03:40
dans
Hack mod customisations et autres modifications
#14438 Un robot quadripède
Posté par
sur 13 février 2010 - 09:36
dans
Bric-à-brac

#17555 Stephane de Toulouse
Posté par
sur 26 juillet 2010 - 10:50
dans
Et si vous vous présentiez?
+1 Thot Les représentants Toulousains commencent à arriver c'est bien
Le LAAS est apparement assez réputé dans le domaine de la recherche en Robotique d'ailleurs.
Bonne chance pour tes futurs projets et à bientôt sur le forum.
#13345 Régulateur et Régulateur à découpage ?
Posté par
sur 15 octobre 2009 - 08:56
dans
Electronique
un régulateur à découpage hache la tension d'entrée (avec un style de PWM) pour l'abaisser à la tension de sortie voulue. Un régulateur linéaire utilise des composants style diode zener et transistor pour faire chuter la tension et l'amener à la tension voulue.
La différence réside dans le fait que l'alimentation linéaire absorbe la puissance en "trop" c'est à dire que si tu consomme 2A en permanence et que tu as une chute de tension de 2V au bornes de ton régulateur (pour passer de 7v à 5V par exemple) tu va perde 4W en dissipation thermique dans ton régulateur, et c'est assez énorme. Avec le régulateur à découpage tu limite considérablement les pertes, et tu as un rendement beaucoup plus élevé.
Si tu veux plus de détails google est ton ami...
#14521 Robot breakdance
Posté par
sur 17 février 2010 - 11:37
dans
Robotique ludique, robotique insolite
une petite vidéo d'un robot japonais qui fait une petite scéance de breakdance !
assez impressionnant la vitesse et la fluidité des mouvements.
Robot Breakdance
#14540 Robot breakdance
Posté par
sur 19 février 2010 - 04:30
dans
Robotique ludique, robotique insolite
C'est vraiment génial !


En ajoutant une petite perruque sur le même thème et ça aurait été super cool
C'est assez fun comment il l'ont habillé oué
Hein quoi Inounx ? je viens de tilter que tu est de toulouse oO
Si tu veux qu'on se voit un de ces weekend hésite pas, on parlera de nos projets de robots
(Tu avais déjà tilté sur mon sujet de présentation ^^) Oué c'est une bonne idée de se rencontrer, c'est toujours sympa de connaître du monde qui aime la robotique
C'est pas trop le sujet pour en parler donc jt'envoie un MP pour voir nos dispo.
#14539 Ririx24
Posté par
sur 19 février 2010 - 04:27
dans
Et si vous vous présentiez?
Bonjour à tous, j'ai 20 ans, je suis en L3 ingénierie des systèmes et microsystèmes embarqués (ISME) à Toulouse.
Je posséde un robot (qui est maintenant démonté) du même type que IRbot à base de picbasic 3B. Je suis actuellement sur un projet de robot d'exploration sur une base de voiture télécommandée avec un module ROVIN (qui ne veut pas communiquer avec mes pc
Hé hé comme disait Electron un toulousain de plus
Moi je suis en Master 1 IUP Systèmes Intelligents, on doit avoir cours dans le même bâtiment de la fac je crois ^^ (U3)C'est pas possible d'envoyer une commande simple comme indiqué donc ?
Pour les clubs Adultes en région de Toulouse :
http://www.etud.insa-toulouse.fr/~club_robot/
Après ce sont que des clubs pour collégiens et primaires.
Le club INSA c'est surtout bien pour la coupe de france. Après je pense pas qu'il aient beaucoup d'activités à coté. Ya aussi un club de robotique qui s'est reouvert sur la fac (Paul Sabatier) pour l'instant ce sont les L3 Systèmes Intelligents qui le gèrent mais comme le club insa c'est pour participer à la coupe de france (Je les connais bien je peux te mettre en relation avec eux si cela t'intéresse). Je sais qu'il existe aussi une plateforme qui s'est créée l'année dernière : Artilect, créée par 2 personnes du laas il me semble. ça fait un moment que j'ai pas regardé comment sa a évolué.
EDIT : Il semble que les membres (et non membres) d'Articlect se retrouvent tout les lundis à la manufacture de Tabac 21 allée de Brienne, Salle ME -006 en sous-sol. Je vais essayer de reprendre contact avec eux pour avoir des détails sur leurs activités.
#17554 RHex
Posté par
sur 26 juillet 2010 - 10:43
dans
Général
Je serais curieux de savoir à quel vitesse il va dans la dernière séquences.
Je ne sais pas à quelle vitesse il va mais je dirais peut être une dizaine de km/h ou plus.
Ca fonctionne comment ? servos ? air comprimé ou autre fluide ?
Il y a pas mal de détails sur cette page qui semble dédiée à l'avancement du projet : RHex Platforms and Versions
Il spécifient que sur la toute première version ce sont des moteurs 20W à courant continu réductés de 33:1. Des moteurs tout ce qu'il y a de plus classique donc.
J'aime bien les petits détails : on voit qu'il tourne sous DOS par exemple, ou que grâce à ses batteries (2 * 2.2Ah@12V) il dispose d'une autonomie de 48 minutes et de 8 minutes seulement en course !
C'est beaucoups moins impressionant du coup...
Faut aussi voir qu'avec des moteurs 20W avec 50% de rendement ce qui est déja pas bien terrible, leur asservissement qui contrôle les roues a l'air assez violent (un PD rafraîchit à 1khz) sa m'étonne pas que l'autonomie soit assez faible.
C'est curieux mais ca me fait penser à une roue au diamètre important, seul le moteur doit être puissant.
Je ne vois pas bien l'interet de cette pate rotative par rapport à un véhicule roulant 4x4.
Effectivement ça fait penser à des roues au diamètre important mais le comportement n'est pas du tout le même au final. Vu le sens ou est fixée la patte, elle permet en quelque sorte d'agripper des choses notamment lorsque le robot passe par dessus les rails, ou monte les escaliers. Avec un robot de la même taille et avec des roues 4x4 sa ne serait pas forcément passé. L'intérêt aussi c'est pour les surfaces du style boue et eau, je pense que les pattes peuvent faire gagner un peu, ça évite de s'embourber et dans l'eau ça lui permet de se déplacer efficacement. Je ne sais pas si tu as remarqué mais les pattes ne font pas des rotations à vitesse continue. Il y a toujours 3 pattes au sol pour le soutenir, on voit qu'il y a un point d'arrêt (même très bref) au niveau du sol.
#14987 Resistance de tirage Arduino
Posté par
sur 15 mars 2010 - 08:29
dans
Electronique
C'est bien de regarder la consomation de ton petit robot dans le détail ^^ Par contre ne te fait pas de souci tu peux laisser 10Kohm tranquille. C'est une valeur de résistance classique donc facile à trouver (meme si on peut trouver toutes les résistances des séries E12 et E24 facilement) et ensuite 0.5mA sa reste quand meme très faible (5v / 10kohm). Imagine que tu as 5mA de conso soit 10 de tes interrupteurs actifs en meme temps. Sachant que tu va avoir de bon petits moteurs qui vont consommer mini une centaine de mA chacun je suppose sa reste quand meme négligeable. Ensuite niveau électronique avec mes quelques connaissances je suppose qu'avoir une résistance pas trop grande permet de ne pas avoir trop de parasites quand ton interrupteur est relaché (à faire confirmer par les pros du domaine). Après 10k... c'est pas fondamentalement important tu peux mettre 47k 100K, ce que tu as sous la main ^^
#17603 Recherche caoutchouc pour chenille
Posté par
sur 01 août 2010 - 09:50
dans
Mécanique
il y a aussi quelque chose que tu peux utiliser et qui t'éviterait ainsi d'avoir à souder les bouts d'une courroie de caoutchouc, ce sont des ronds de roues toutes faites, des tubes de caoutchouc que l'on peut récupérer en déchetterie ou encore de gros élastiques (il y en a qui adhèrent bien).
Salut Sani300,
je ne sais pas si Dr Calvin faisait exactement référence à ça mais soit en utilisant une chambre à air de vélo que tu découpe dans la longueur, soit en utilisant une chambre à air de voiture (bcp plus difficile à trouver je pense vu que tous les pneus sont en tubeless maintenant) que tu coupe dans la tranche. le caoutchou assez lisse de chambre à air à une plutôt bonne adhérence. On avait utilisé sa en en mettant autour de roues de modélisme pour avoir plus d'adhérence pour la coupe de france. Pour coller le caoutchou je dirais qu'une colle type néoprène ça peut se tenter. Ce genre de colle est tellement chimique que sa fait fondre le plastique si t'en met juste sur la tranche de la chenille des deux coté sa devrais bien coller le tout sans créer un point dur génant. (Enfin je te dit ça, je n'ai pas testé faut expérimenter
) L'idéal est quand meme de pouvoir prendre une tranche de tube.
#16768 quelques questions
Posté par
sur 28 juin 2010 - 12:06
dans
Bric-à-brac
J'ai déjà commandé sur le site pro de radiospare, le seul qui existait à l'époque et sur lequel il y avait effectivement une valeur minimum de commande pour les particuliers, moi, il me sembles que c'étais plutôt dans les 60 mais je me trompes peut être.
Ça fait quelques années que je n'ai plus rien commandé chez eux vu qu'ils ne livrais plus que les professionnels, je n'étais pas au courant de ce nouveaux site, il l'on ouvert récemment ?
Et bien je suis comme toi,et effectivement "à l'époque" il y avait un minimum de commande de 50 euros. C'est ensuite passé à 150 euros pendant une période. Je n'ai plus trop commandé ensuite donc je ne sais pas si ça à ouvert récemment ou non.
#16520 quelques questions
Posté par
sur 20 juin 2010 - 06:11
dans
Bric-à-brac
Hé moi aussi je suis fan d'Inounx
Hé hé je ne savais pas que j'avais un fan ^^
Ps : désolé obrelux pour le pourrissage de sujet...
#16464 quelques questions
Posté par
sur 19 juin 2010 - 12:42
dans
Bric-à-brac
1) Le pont en H est une structure électronique composée la plupart du temps de 4 transistors (et 4 diodes de roue libre). Cela permet de controler un dipole en inversant ou non la tension à ses bornes. Ce dipole est la plupart du temps un moteur en robotique même si on peut controler tout est n'importe quoi avec un pont en H.
pour plus d'infos : http://fr.wikipedia.org/wiki/Pont_en_H
et si tu veux encore plus de détails je te laisse chercher un peu sur le net, c'est quelque chose de très classique en électronique. (Il existe notamment des composants intégrés qui réalisent cette fonction sans avoir à tout faire soit même).
2) Pour transformer une tension alternative en continue tu as plusieurs solutions : la plus simple et la plus "historique" est d'utiliser un pont de diode (pont de graetz) qui va redresser ta tension puis de filtrer le tout avec un ou deux condensateurs. Une autre solution plus couteuse mais plus efficace en rendement est d'utiliser un hacheur. Le principe est de découper la tension très rapidement, puis de filtrer pour qu'en sortie la tension soit au niveau voulu (meme si c'est simplifié, on coupe la tension les 3/4 du temps pour avoir 1/4 de la tension en sortie par exemple). Même chose le net regorge d'infos sur ces choses là google est ton ami.
3) Gotronic, Sélectronic, Electronique diffusion, Lextronic, (conrad comme tu as dit mais il sont pas terrible sauf pour quelques trucs particuliers), radiospare (plutot réservé professionnels mini de commande de 150 euros il me semble si t'es particulier) et farnell (pour pro aussi mais livrent au particuliers si commande > 30 euros) . Hors de la france tu as sparkfun, roboshop (canada) et je ne sais plus quoi d'autre. J'en oublie surement il en existe tellement...
#16474 quelques questions
Posté par
sur 19 juin 2010 - 03:22
dans
Bric-à-brac
merci, tu m'aide bien
Avec plaisir
Regarde chez les autres revendeurs, tu trouvera forcément ce qu'il te faut ^^je leur ait juste trouvé deux défauts (pour l'instant
) :
1)Ils sont à cours de pickit3
2) Ils ne vendent apparemment pas de pic
Voilou !
J'ai regardé tes réalisations, sa me rapelle moi quand j'étais plus jeune. C'est bien continue comme ça t'es sur la bonne voie ^
#16471 quelques questions
Posté par
sur 19 juin 2010 - 02:28
dans
Bric-à-brac
Non ce n'est pas moins cher : comme ils ont pour principal but de vendre à des entreprises, tout les prix sont Hors Taxe.
------- EDIT ------
Autant pour moi, il existe un site radiospares pour les particuliers sans minimum de commande apparement :
COMMANDES ET PRIX
Les commandes peuvent nous être passées exclusivement par Internet sur le site www.rs-particuliers.com.
Les prix en vigueur sont ceux figurant sur notre site www.rs-particuliers.com. Ils sont stipulés en Euros toutes taxes comprises mais hors frais de traitement et livraison. RS Components SAS se réserve le droit de les modifier à tout moment mais s’engage à appliquer les prix en vigueur qui vous auront été indiqués sur le site au moment de la validation de votre commande.
Les frais de traitement et de livraison s’élèvent à :
10 € TTC pour une commande inférieure à 100 € TTC,
5 € TTC pour une commande comprise entre 100 et 150 € TTC,
0 € pour une commande supérieure à 150 € TTC.
et c'est par là : http://www.rs-particuliers.com/
#17604 Projet robot d'exploration ROBERT
Posté par
sur 01 août 2010 - 10:31
dans
Robots roulants, chars à chenilles et autres machines sur roues
je n'ai pas trop le temps de m'en occuper en ce moment avec mon stage et mon rapport à finir mais j'essaye de m'y tenir.Coté odométrie le problème est réglé, cela venais du fait que les entrées des capteurs sur le CPLD n'étaient pas synchrones avec l'horloge du CPLD ( 50Mhz), je pense que vu que c'est un composant hyper sensible avec les moteurs en marche il devait "attraper" tout les parasites qui trainaient, d'où les fausses valeurs.
J'ai essayé de mettre en place des PID sur chaque moteur, un à gauche et un à droite ça fonctionne nickel. Pour l'asservissement delta - alpha c'est pas encore ça par contre, j'ai du mal à bien régler les coefficients. J'ai aussi essayé de mettre les PID delta et alpha commandant les PID droite et gauche, je ne sais pas si cela vient du fait que la boucle d'asservissement est faite sur le même retour capteur mais le système devient très rapidement instable (oscillations dans les plages de régime permanent).
En plus c'est vrai que devoir reprogrammer l'arduino à chaque fois que je fait un changement de coeff c'est vraiment pas pratique. J'évite de faire des saisies console, les fscanf (et aussi les fprintf) sa prend 3 tonnes de place dans la mémoire et les 16ko de l'atmega168 se remplissent vite. J'ai donc décidé de prendre un peu d'avance sur ce que j'avais prévu de faire. J'ai rajouté la roboard sur le robot afin de pouvoir commander l'arduino via la connexion série.
Le protocole de communication que j'utilise est simple : on envoi un premier caractère de début de trame (j'ai choisi 0x80, mais peut être n'importe quoi d'autre) ensuite on envoi la taille de la trame sans compter les caractères de début et fin de trame. En suivant un code 8 bits est envoyé représentant l'ID de la commande (pourra être étendu à 16 bits si 255 commandes ne suffisent pas) suivent ensuite tout les octets de la commande et pour finir le caractère de fin de trame (0x90). La longueur de la trame permet d'effectuer une vérification sur la trame et évite de confondre le caractère de fin avec un octet de donnée. Ce qui donne en résumé :
START - LENGTH - ID - D1 - D2 - ... - Dn - STOP
Les commandes permettront donc de commander entièrement le bas niveau du robot (les PID, les commandes moteurs brutes, les capteurs, etc). tout le mécanisme de réception et déserialisation des commande est codé sur l'arduino mais pas encore testé. J'ai remis en marche la roboard et je me suis débattu quelques temps afin de faire fonctionner correctement le wifi. J'arrive à me connecter à mon routeur wifi pour l'instant ce qui me suffit même si à terme l'intéret serais de se connecter à un réseau connu si existant ou sinon créer un réseau ad-hoc. Il me reste encore à coder une petite application permettant d'envoyer des commande à l'arduino, ce qui va simplifier la mise au point de l'asservissement. Le but est de soit faire une application avec socket pour communiquer à travers le réseau et donc commander le robot à distance, soit faire une page web avec un script CGI. Je n'ai pas encore choisi ce que j'implémenterai même si il y a des chances que je fasse les deux.
J'avais aussi mis en place tout un système de TTS (Text To Speech) pour le faire parler, ce qui pourrait être marrant, mais je ne me rappelle plus comment je l'utilisais
je vais essayer de retrouver ça.
Image(s) jointe(s)
#16463 Projet robot d'exploration ROBERT
Posté par
sur 19 juin 2010 - 11:56
dans
Robots roulants, chars à chenilles et autres machines sur roues
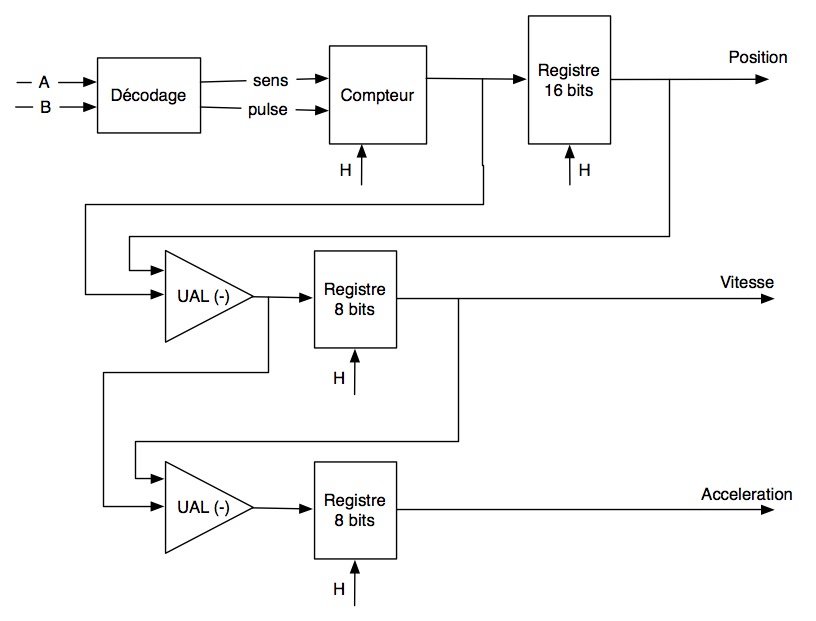
maintenant que j'ai un peu plus de temps pour travailler sur le robot, j'ai pu finir avec un ami la carte à CPLD qui sert à décoder et à compter les informations des codeurs optiques. J'ai mis en place un asservissement tout simple en théta-alpha (asservissement polaire). étant donné que c'est la première fois que je me lance dans la pratique pour un asservissement (en dehors des cours mais c'est là qu'on s'aperçoit que quand on fait marcher une manip toute faite et en étant guidé cela n'a rien à voir avec le faire "en vrai") je me heurte fatalement à des petit problèmes. J'ai donc quelques petites questions pour ceux qui passerons dans le coin :
- Dans le principe mon asservissement fonctionne (plus ou moins il faut régler les coefs) mais assez régulièrement (et je ne sais pas pourquoi) je fait des lectures fausse de valeurs. Du coup quand j'ai une consigne de 30tick / dT par exemple de temps en temps je me retrouve avec une valeur -1500 ou 400. Comme vous pouvez vous en douter sa donne des à-coups sur la commande et sa fausse complètement le positionnement. Est ce que certains d'entre vous ont déjà été confrontés à ce problème là ? je pensais filtrer les mesures mais après c'est génant dans le fait où je suis limité en dynamique du système, même si dans l'absolu mon robot n'a pas besoin d'être très dynamique. Je me demandais si cela venait pas des moteurs qui perturbent la lecture à certain moments, parce que dans le doute j'ai incriminé la carte à CPLD. Comme il y a un registre qui me permet de commander des pattes en sortie du CPLD j'ai fait un programme qui réalise en boucle des cycles de lecture écriture avec des valeurs différentes. Et résultat du test : aucune erreur sur des millions de lectures / écritures. Je me suis aussi aperçu qu'il y avait moins d'erreurs de lecture quand je faisait une première lecture bidon puis les "vraies" lectures ensuite. (Il faut encore que je fasse d'autres tests de lecture sur le CPLD dans des conditions différentes, je crois que c'est trop sensibles ces bestioles là)
J'utilise pour l'instant un quartz 50mhz pour toute la partie synchrone du CPLD mais je pense diminuer un peu pour limiter les problème (vers 20/30Mhz). Autre chose que j'ai failli oublier mon CPLD est alimenté en 3.3V (5V compliant sur les entrées) et je me demandais si ça pouvais jouer sur les erreurs de lecture par le uC (même si en théorie le seuil logique est à 2V équelques il me semble pour du 5V)
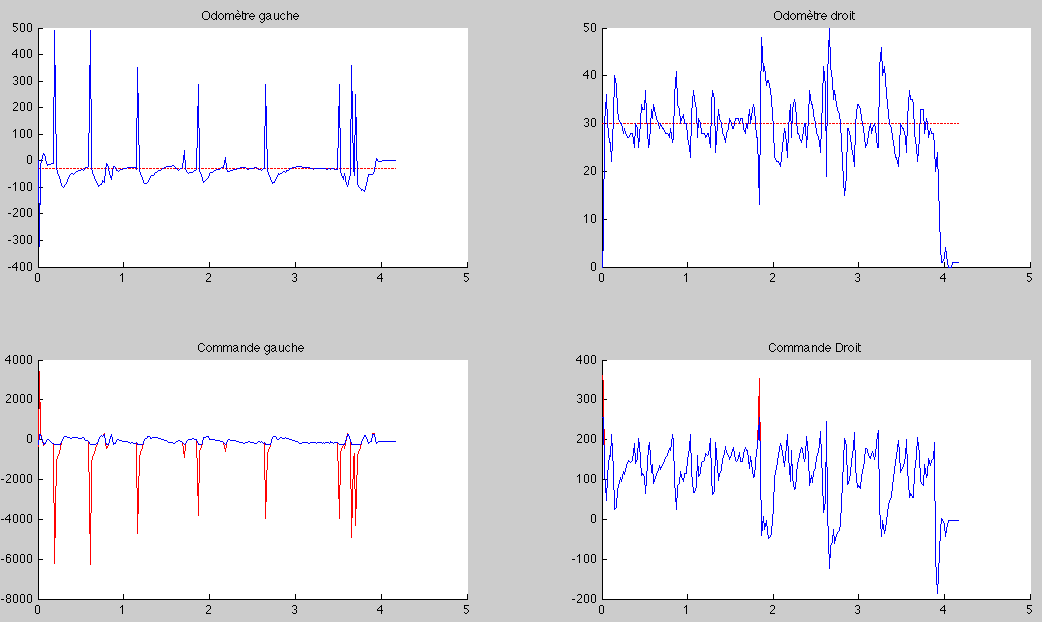
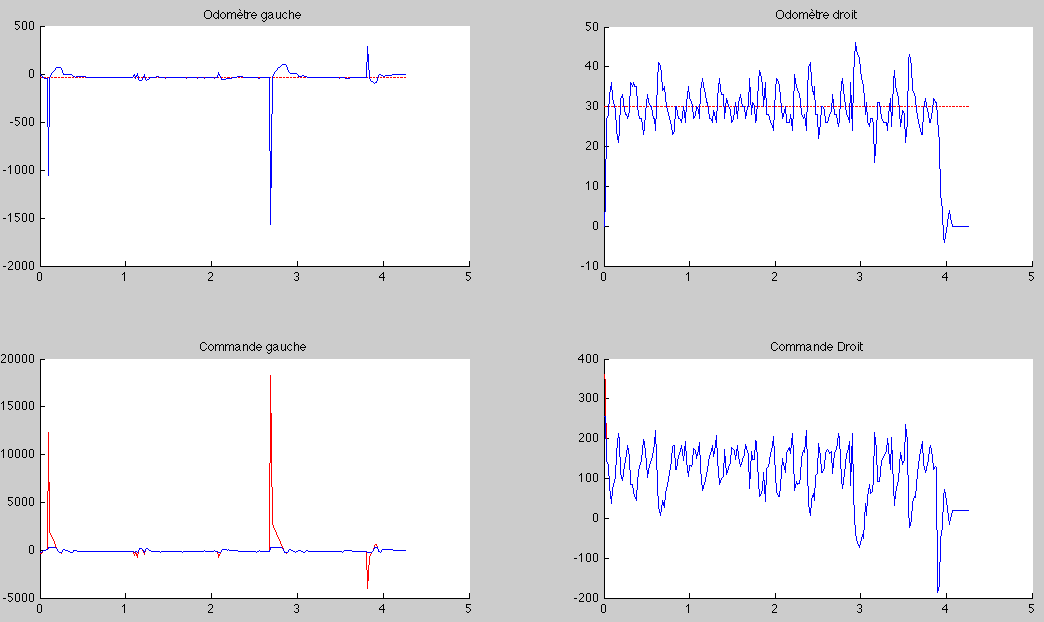
- Par la liaison série de l'arduino je renvoie les valeurs de mes codeurs et les valeurs des commandes générées par les PID. J'affiche ensuite tout ça avec matlab. C'est là qu'on se rend compte que la moteur gauche est très bien positionné par rapport à sa consigne (sans tenir compte des erreurs de lecture) alors que le moteur droit oscille autour de sa consigne. Comme l'asservissement est effectué sur les deux moteurs à la fois et non sur chaque moteur séparément je me demandais si c'était vraiment normal. Je joint deux captures d'écran Matlab : la première montre un essais de consigne de 90°/s sur 3s, la deuxième montre la même chose mais avec une lecture bidon effectuée avant les vraies lectures.
Légende : pour les odomètres courbe bleue = valeur lue, rouge = consigne.
Pour les les commandes courbe rouge = commande brute calculée par les PID, en bleu la même commande seuillée entre 255 et -255 (255 pas de PWM avec avant ou arrière).
Le delta de temps est de 1/61s (calcul des PID à 61Hz). Les unités des courbes de odomètres sont en ticks sur l'axe Y et en secondes sur l'axe X. Pour les courbes des commandes sur Y il n'y a pas d'unité ce sont des "pas de PWM" et sur X toujours le temps en secondes.
Image(s) jointe(s)
#14751 Projet robot d'exploration ROBERT
Posté par
sur 28 février 2010 - 11:32
dans
Robots roulants, chars à chenilles et autres machines sur roues
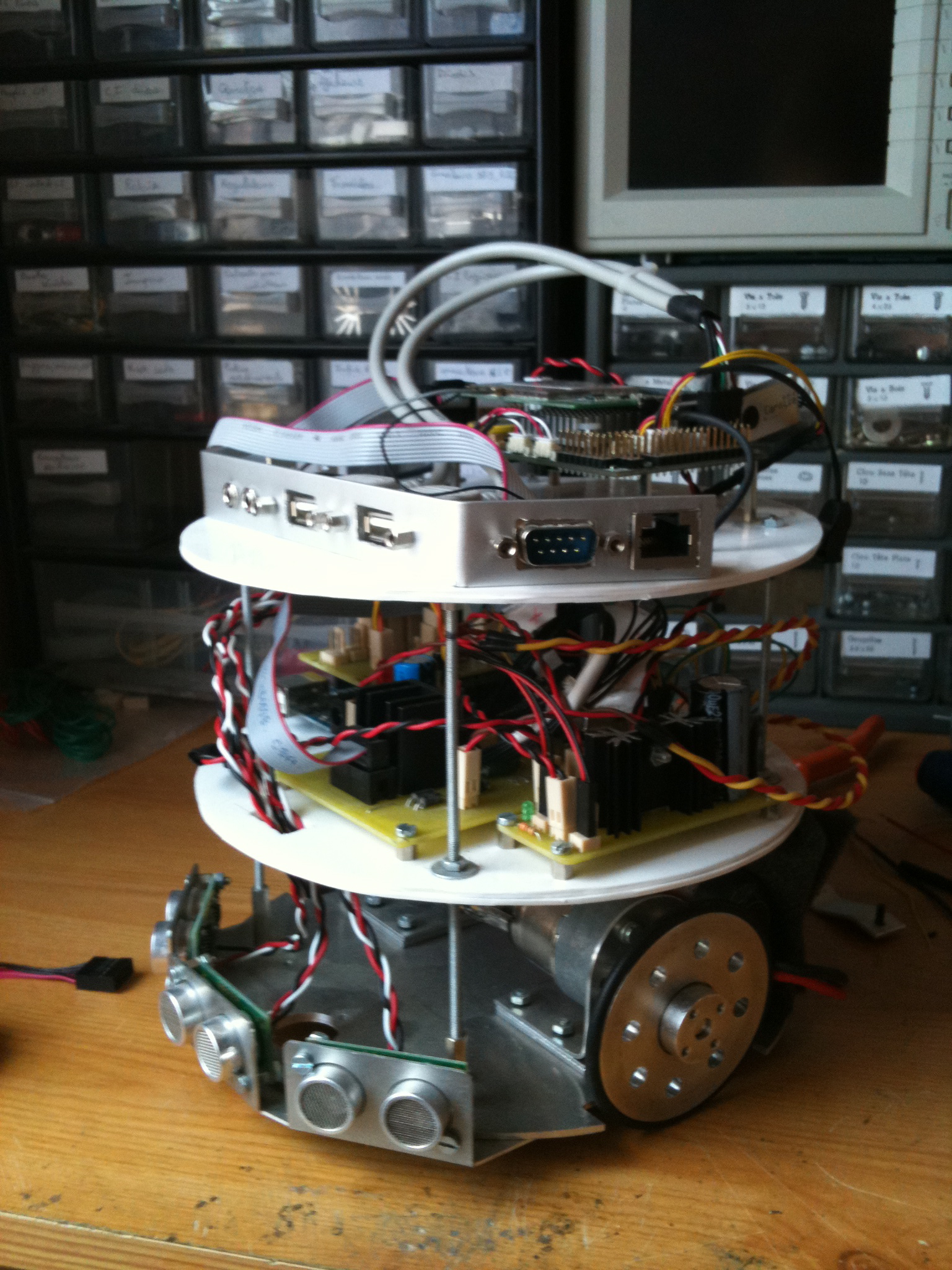
de mon coté mon Robert roule aussi, mais juste pour tester la communication uC <-> carte moteur avec une gestion des collisions ultra simple ( 1 seul capteur US) , il n'y a rien d'implémenté au niveau asservissement encore.
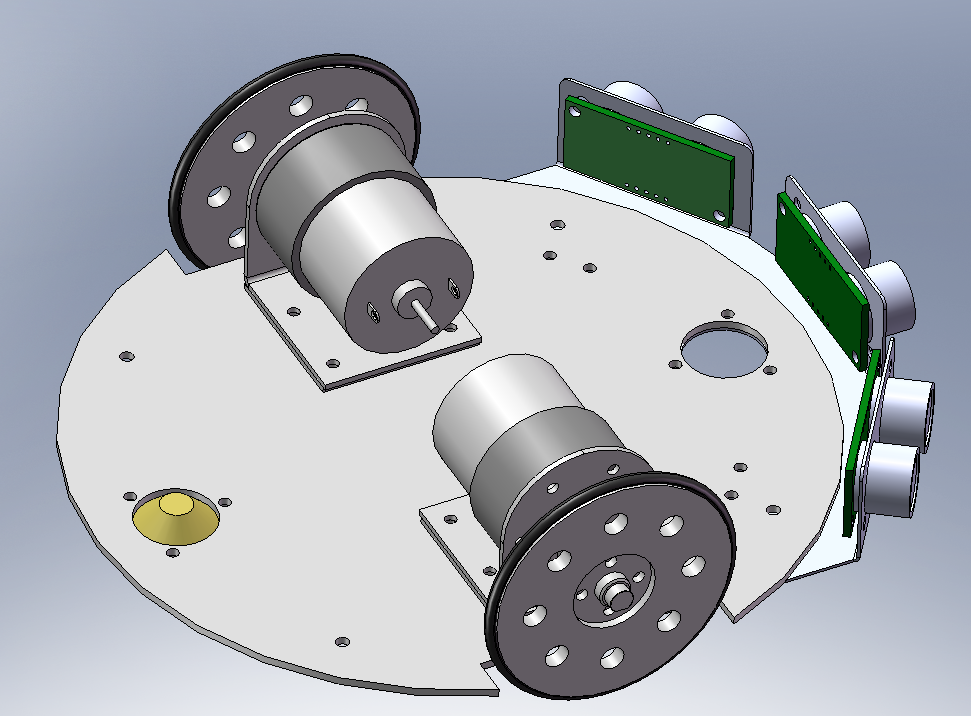
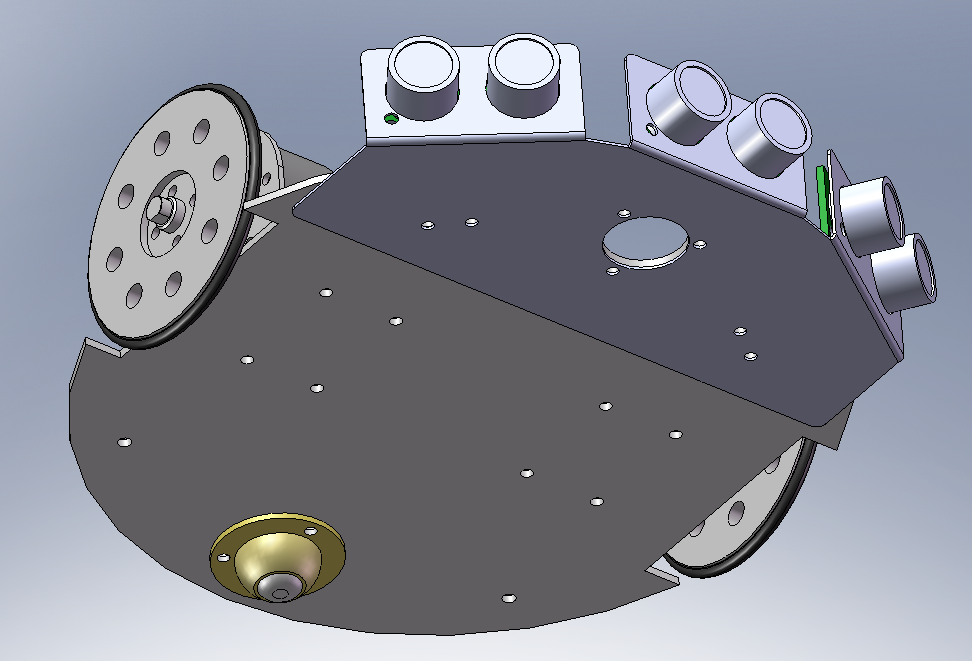
Hier j'ai réussi à trouver du temps dans la journée et j'ai pu me faire un petit arduino shield avec tout les connecteurs nécessaires (5 connecteurs pour capteur US dont 3 vont être utilisés de suite et 2 autres pour prévoir de l'améliorer, 1 connecteur pour la liaison série avec la roboard, 1 connecteur Two Wire Interface, des connecteurs pour repiquer le 5v de l'arduino, un connecteur pour la liaison avec la carte driver moteur et un petit pont diviseur de tension pour mesurer la tension batterie). C'est vraiment plus propre et plus pratique pour les branchements
J'ai aussi fait une petite carte d'alimentation en essayant de respecter les bons principes : condo de stockage en entrée et condo de découplage, yen a aussi sur les toutes les autres cartes. Je pense que l'alim est pas trop crade, faudra que je vérifie. Donc cette carte alim elle permet "juste" (c'est son boulot quoi) de recupérer la tension batterie, de la filtrer un minimum, et de la dispatcher sur toutes les cartes qui en ont besoin. J'y ai aussi mis un petit régulateur linéaire 7805 pour avoir du 5v si je veux brancher un petit truc en plus. Je ferais un petit post sur mon blog pour les montrer plus en détail, mais pour l'instant j'attends d'avoir tout mes connecteurs. Prochaine étape typon de la carte à FPGA. Le codage interne avance doucement, surtout qu'on code avec un ami un petit protocole de liaison perso, et que ces foutues bestioles de FPGA sont super sensibles à tout les parasites qui trainent, faut faire gaffe au boucles de masses et autre joyeusetés.
Coté mécanique j'ai commandé pour yoann et moi chez EasyRobotics un support pour les 3 capteurs US que j'attends de recevoir.
Voir les pièces jointes pour le schéma de principe pour le décodage des signaux en quadrature, et des images de la modélisation du support capteur.
Je crois que c'est tout pour l'instant
Image(s) jointe(s)
#17625 Projet robot d'exploration ROBERT
Posté par
sur 03 août 2010 - 11:27
dans
Robots roulants, chars à chenilles et autres machines sur roues
Si j'ai bien compris, tu as essayé de bidouiller des asservissements PID imbriqués.
C'est tout a fait ça oui. Comme j'ai vu que certains robots de coupe de france utilisaient cette technique je me suis dit "Pourquoi pas essayer ?" Par contre les robots de coupe on de bonnes raisons de l'utiliser puisque qu'ils réalisent l'asservissement des moteurs avec les codeurs qui sont fixés sur les moteurs et l'asservissement polaire avec des codeurs "libres" qui mesurent l'avancement sur le sol.
J'ai mis ces asserivessements en place surtout pour compenser la non linéarité de la commande sur mes moteurs (Commande PWM sur 8bits mais les moteurs n'avancent réellement que vers 150 / 255. Pour régler ça sans PID j'ai mis un offset tout bête dans la commande).
Premièrement, ça n'est pas indispensable: tu peux utiliser directement un asservissement "avancement/angle" (que tu appelles delta alpha), qui commande directement les moteurs. C'est en général ce que font les roboticiens.
Effectivement tu n'est pas le premier qui me dit ça.
Ensuite, si tu veux vraiment faire des asservissements imbriqués, il faut que le temps de convergence de l'asservissement "bas niveau" (ici le PID sur l'avancement des roues) soit très faible par rapport aux constantes de temps de ton asservissement "haut niveau". Sinon, tu peux très bien avoir des phénomènes de divergence.
Là pour le coup je me sens terriblement bête
 ça ma pas posé de problème quand j'ai codé mes asservissements de les mettre dans la même boucle de rafraîchissement. Rha ! tu m'étonnes que ça marchait pas... Bon au moins je crois que je m'en souviendrais pour le coup ^^ Le pire c'est que je l'ai déjà vu en cours, chose qu'on a du nous répéter X fois. Comme quoi rien de mieux qu'un peu de pratique !
ça ma pas posé de problème quand j'ai codé mes asservissements de les mettre dans la même boucle de rafraîchissement. Rha ! tu m'étonnes que ça marchait pas... Bon au moins je crois que je m'en souviendrais pour le coup ^^ Le pire c'est que je l'ai déjà vu en cours, chose qu'on a du nous répéter X fois. Comme quoi rien de mieux qu'un peu de pratique !En tout cas merci bien pour les conseils Léon




