Posté par
Posté par
NoNo, 28 ans, j'habite dans le Calvados .
J'arrive ici car j'aimerais concevoir mon premier robot et je suis tombé sur cette communauté durant mes recherches .
J'ai déja un peu "d'expérience" avec divers projets Arduino mais sans aucune partie mécanique : principalement du monitoring/régulation de temperature
 .
.Je ferais un topic dédié plutard mais voici une petite présentation de mon futur robot !
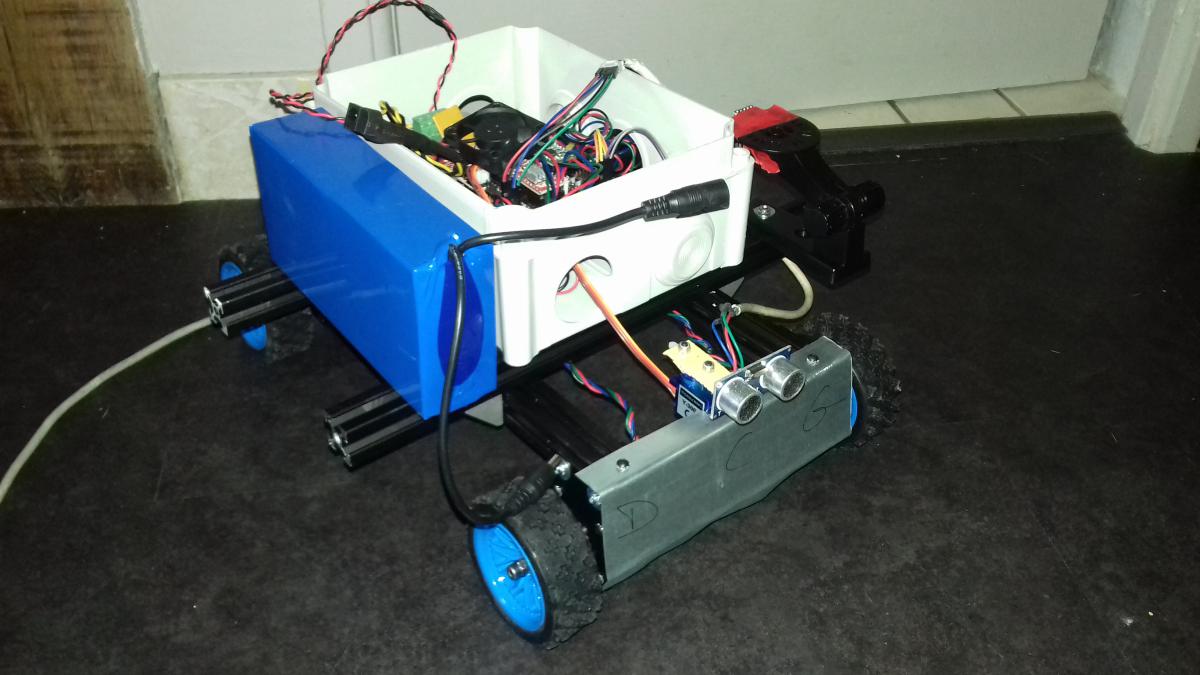
J'aimerais fabriquer un robot "patrouilleur" qui puisse se déplacer sur mon terrain avec un parcours prédéterminé (dans un premier temps) . Je pense partir sur une base de voiture télécommandée ( un jouet , pas du modélisme ) , un modèle tout terrain , commandée par un Arduino . J'aimerais aussi intégrer un rechargement via des panneaux solaires .
Bref j'ai de quoi faire
!A+
 !
!