Bonjour,
Avant de me lancer dans l'élaboration d'un PID j'ai voulu étudier plus en détail les différentes valeurs de ma centrale inertielle. L'idée est de savoir quelle variables je vais devoir utiliser pour mon PID, je rappelle que l'axe X correspond à la rotation de mon robot et que l'axe Z est dirigé de vers l'avant du robot.
J'ai réalisé un premier essai ou je faisais osciller le robot autour de l'axe X :

On remarque premièrement que toutes les courbes ont grosso modo un comportement périodique. Au départ je voulais travailler avec la rotation par rapport à X et les accélération par rapport à Z et X. Pour que les résultats soient plus lisible j'ai décidé de lisser les courbes en raccourcissant l'échelle, ce qui donne la courbe suivante :
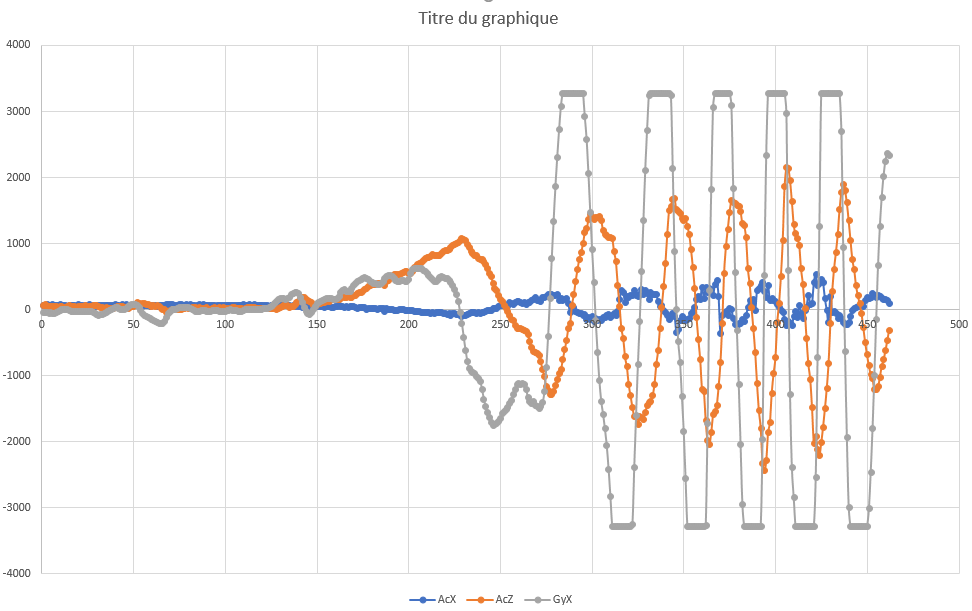
On remarque que l'accélération en X et la rotation autour de X sont déphasées d'une valeur de PI. Je peux donc me passer de l'accélération en X car elle fournis grosso-modo la même information.
J'ai ensuite fait un essai avec des accélération angulaire plus importante et en ne gardant que l'accélération en Z et la rotation en X ce qui me donne :
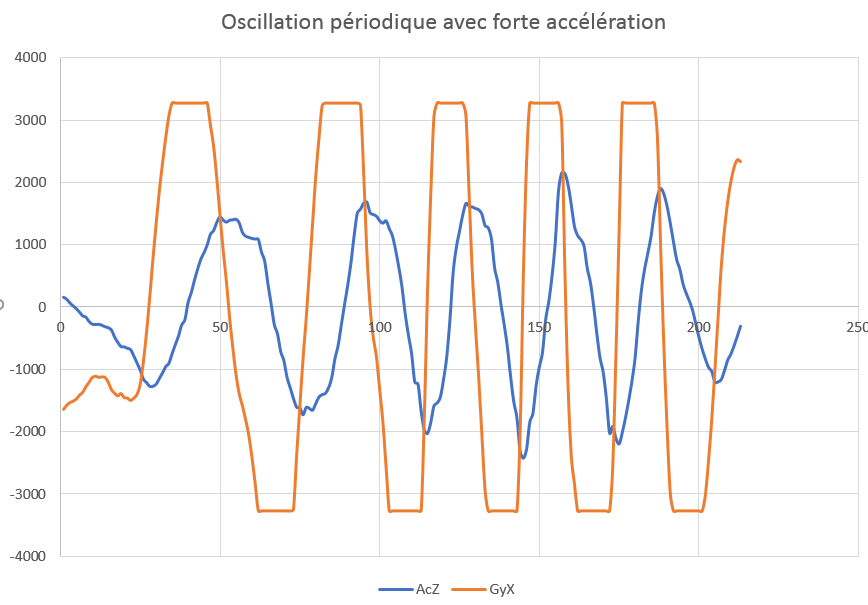
Je trouve que le corrélation entre les deux valeurs est nette, lorsque le robot accélère vers l'avant, l'angle augmente, lorsque qu'il accélère vers l'arrière, il tombe, l'angle diminue.
J'ai donc une petite question à vous poser, dois-je partir sur un asservissement avec ces deux valeurs ? Ou bien juste la rotation en X suffis ? Car au final les deux courbes sont aussi déphasée... Ne vais-je pas me compliquer la vie à manipuler deux valeurs qu'elles disent encore une fois la même chose ?
Parce que je pense qu'il est important d'avoir une infos sur l'accélération, plus le robot va tombé vite, plus l’accélération va être forte et donc plus les moteurs devront envoyés pour compenser. mais je peux quand même connaitre cette accélération avec la variation angulaire (plus elle est rapide, plus on accélère)
J'ai raison ou mon raisonnement est à mettre à la poubelle ?