
Essaye plus petit que par pas de 1 oui =)
Il faut du d faible =)
Pour ton histoire de connexion si tu peux souder alors le top c'est de souder tes fils d'alimentation ensemble, et ça sera bon sans risque =)

154 réponses à ce sujet
#101

Mike118
-

- Administrateur
-

- 10â¯342 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 09 février 2018 - 05:23
- Budet aime ceci
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#102
Oracid
-

- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 09 février 2018 - 07:23
Ce genre de chose pourrait te rassurer,
https://www.littlebi...oard-compatible
http://msx-elektronika.pl/en/dc-solderless-breadboard-plug
https://letmeknow.fr...breadboard.html
Sinon, moi je mets le + à un bout et le - à l'autre bout.
https://www.littlebi...oard-compatible
http://msx-elektronika.pl/en/dc-solderless-breadboard-plug
https://letmeknow.fr...breadboard.html
Sinon, moi je mets le + à un bout et le - à l'autre bout.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#103
Budet
-
- Membres
-
- 366 messages
Habitué
- Gender:Male
- Location:69
Posté 11 février 2018 - 05:05
Bonjour à tous,
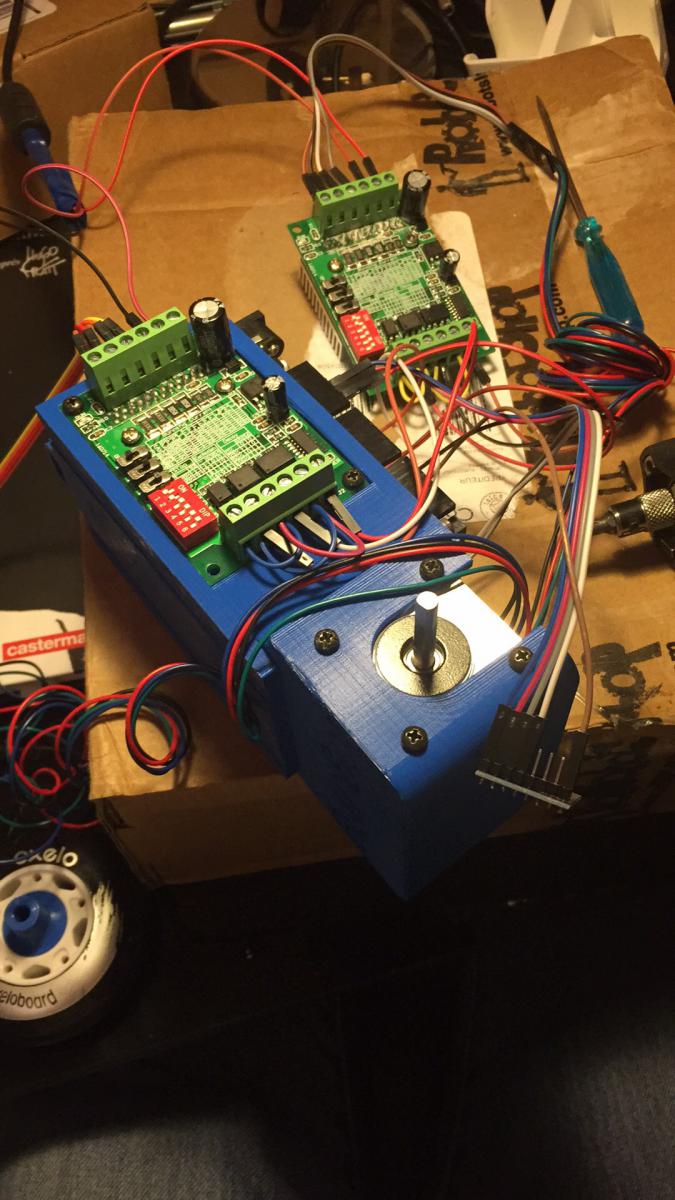
Ce week-end a été plutôt tourné vers l'électronique et la mécanique ! J'ai fais ce que Mike m'a conseillé, soudé 4 câbles sur mon alim (2 masse et 2 +) pour alimenter mes deux driver et ça marche super bien. J'ai tout enroulé de scotch d'électricien pour sécuriser le tout, il faut juste que j'évite de toucher les câbles de mes drivers 
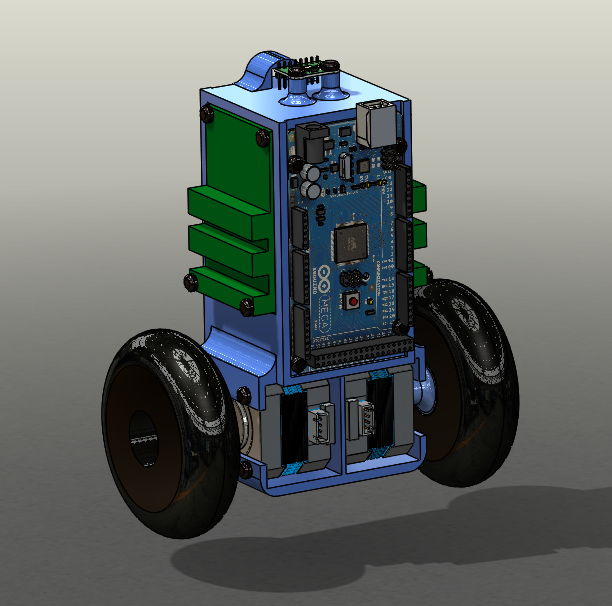
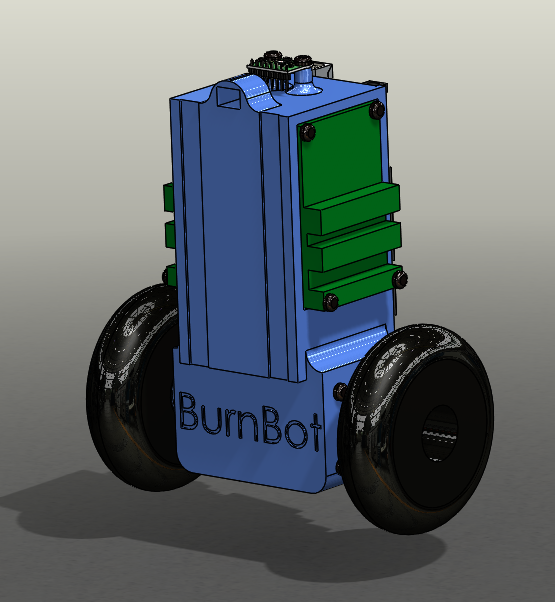
Du coup j'ai décidé de concevoir une version 2 de mon robot (plus compact et plus ergonomique), l'impression est en cours, il y'en a pour 41h donc vous aurez les résultats mardi !
Allez je suis sympa, je vous met les rendus SolidWorks (j'espère que son design vous plaira) :
#106
Path
-

- Modérateur
-
- 2â¯504 messages
Made By Humans
- Gender:Male
- Location:Paris
Posté 11 février 2018 - 07:50
Ash, c'était mon tout premier robot. Un peu ambitieux pour mes connaissances.
J'ai partagé pour que ça serve. Si tu arrive à faire mieux, j'en tirerai des infos ^^
J'ai stoppé parce que je me sentais largué par les explications notamment sur tous les PID imbriqués. J'ai senti qu'il fallait que je fasse des détours pour y revenir plus tard, plus aguerri.
J'ai pris le détour avec Hector pour explorer plus profondément l'odométrie.
I'll be back ^^ C'est pas la fin de l'histoire

#109
Mike118
-
- Administrateur
-
- 10â¯342 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 12 février 2018 - 10:54
Je t'invite si tu le souhaites, à créer un " blog " dédié à ton burnbot qui synthétise tes avancées =) ( afin de les garder aussi clairs que possible pour toi et tous les autres membres ) et de garder ce fil pour nous annoncer les mise à jour du blog et poser des questions demander des avis etc... =)
Oui j'essaye de mettre les blog en avant comme indiqué ici =) , dans l'idée ça te va ? Ou pas ? ^^ Si ça ne te va pas je n'oblige à rien hein fais comme bon te semble =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#110
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 12 février 2018 - 10:54
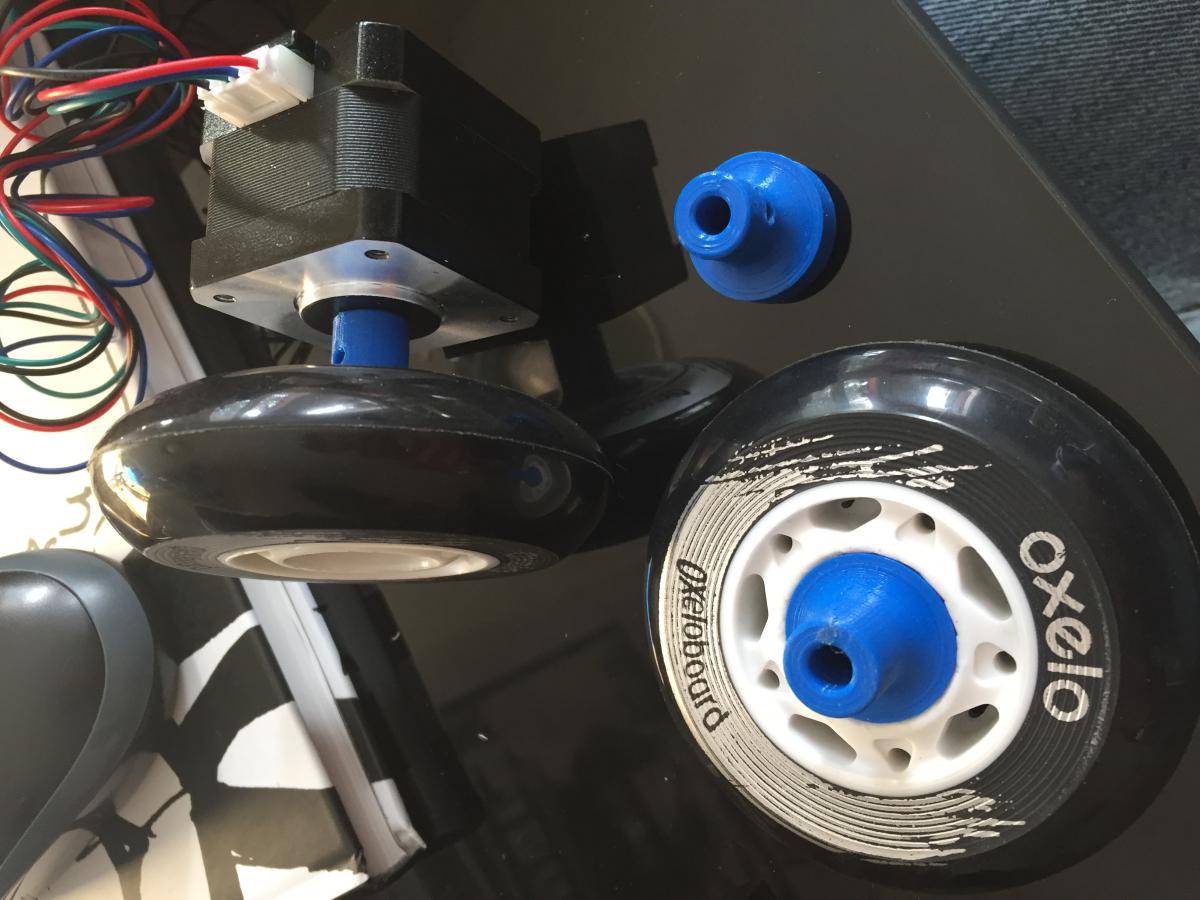
As-tu fait un méplat dans tes moyeux afin qu'ils s'adaptent bien à l'axe des Nema17 ?
J'aimerais bien savoir comment tu fais pour faire des pièces aussi grande.
Moi, j'ai un warping dès que la pièce est un peu grande. Bien avant 10cm.
C'est quoi ton fil ?
J'aimerais bien savoir comment tu fais pour faire des pièces aussi grande.
Moi, j'ai un warping dès que la pièce est un peu grande. Bien avant 10cm.
C'est quoi ton fil ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#111
Budet
-
- Membres
-
- 366 messages
Habitué
- Gender:Male
- Location:69
Posté 12 février 2018 - 11:43
@Mike : j’aime bien poster ici  ca me permet de garder un petit journal de bord (bien que je comprend l’interet Du blog) mais au moins ici ceux sui me lise peuvent avoir accès à mes problèmes, mes solutions et pas que mes résultats. J’aime bien le format du forum
ca me permet de garder un petit journal de bord (bien que je comprend l’interet Du blog) mais au moins ici ceux sui me lise peuvent avoir accès à mes problèmes, mes solutions et pas que mes résultats. J’aime bien le format du forum
@Oracid : non je ńai pas incorporé de plat, j’ai mis le diamètre exact ça suffit et j’ai une vis qui viens bloquer l’arbre.
Pour les impressions j’ai eu des soucis de warping aussi mais l’utilisation du palpeur + amélioration des surgaces dˋadhesion a resolu mes problèmes
Mon fils c’est du Chromatik
ca me permet de garder un petit journal de bord (bien que je comprend l’interet Du blog) mais au moins ici ceux sui me lise peuvent avoir accès à mes problèmes, mes solutions et pas que mes résultats. J’aime bien le format du forum @Oracid : non je ńai pas incorporé de plat, j’ai mis le diamètre exact ça suffit et j’ai une vis qui viens bloquer l’arbre.
Pour les impressions j’ai eu des soucis de warping aussi mais l’utilisation du palpeur + amélioration des surgaces dˋadhesion a resolu mes problèmes
Mon fils c’est du Chromatik
- Oracid aime ceci
#112
Mike118
-
- Administrateur
-
- 10â¯342 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 12 février 2018 - 12:33
Le but c'est pas de ne plus poster sur la partie forum hein ! =) Au contraire il faut continuer d'alimenter le fil du forum C'est de faire un peu comme ce que je commence à faire avec ce blog alors que le sujet du forum qui en parle est là
Mais je comprends ton choix je n'insisterais pas plus =) Bonne continuation en tout cas Bientôt je pourrais en faire un kit de ce robot ! =) ( si tu es d'accord bien entendu )
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#113
Oliver17
-

- Modérateur
-
- 2â¯758 messages
Pilier du forum
- Gender:Male
- Interests:Glenn

#115
Budet
-
- Membres
-
- 366 messages
Habitué
- Gender:Male
- Location:69
Posté 12 février 2018 - 04:15
@Oracid : si la façon dont j’imprime ne fonctionne pas chez toi tu peux toujours telecharger le Cura normal (pas celui de Dagoma) tu as la main sur beaucoup plus de paramètres et tu peux surtout imprimer ta piece sur un « radeau » ce qui limite enormement le warping.
Le problème c’est que tu dois configurer ton imprimante dessus mais y’a des tutos qui expliques quels paramètres mettre pour la discoeasy200
Le problème c’est que tu dois configurer ton imprimante dessus mais y’a des tutos qui expliques quels paramètres mettre pour la discoeasy200
#116
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 12 février 2018 - 06:22
Oui, je pense que je vais passer au Cura normal pour maitriser tous les paramètres. Le problème, c'est que les 2 Cura ne peuvent pas cohabiter. Enfin, c'était comme ça, il y a quelques temps, maintenant je ne sais pas.@Oracid : si la façon dont j’imprime ne fonctionne pas chez toi tu peux toujours telecharger le Cura normal (pas celui de Dagoma) tu as la main sur beaucoup plus de paramètres et tu peux surtout imprimer ta piece sur un « radeau » ce qui limite enormement le warping.
Le problème c’est que tu dois configurer ton imprimante dessus mais y’a des tutos qui expliques quels paramètres mettre pour la discoeasy200
Mais toi, tu utilises lequel ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#118
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 12 février 2018 - 08:16
C'est une bonne nouvelle ! Merci.Comment ça ils ne peuvent pas cohabiter ? Justement j'utilise les deux, même si dernièrement je suis plus sur celui de Dagoma car plus simple à mettre en oeuvre
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#119
Budet
-
- Membres
-
- 366 messages
Habitué
- Gender:Male
- Location:69
Posté 13 février 2018 - 09:38
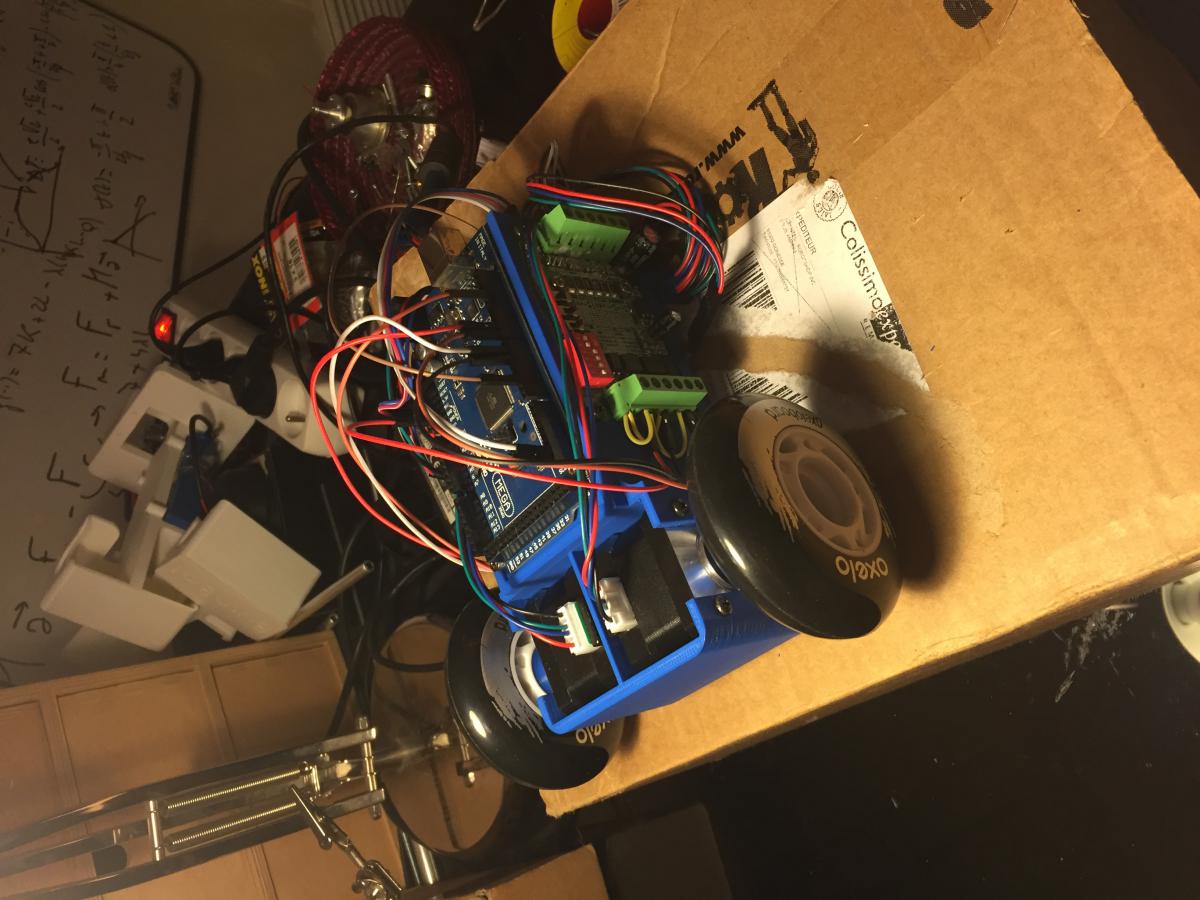
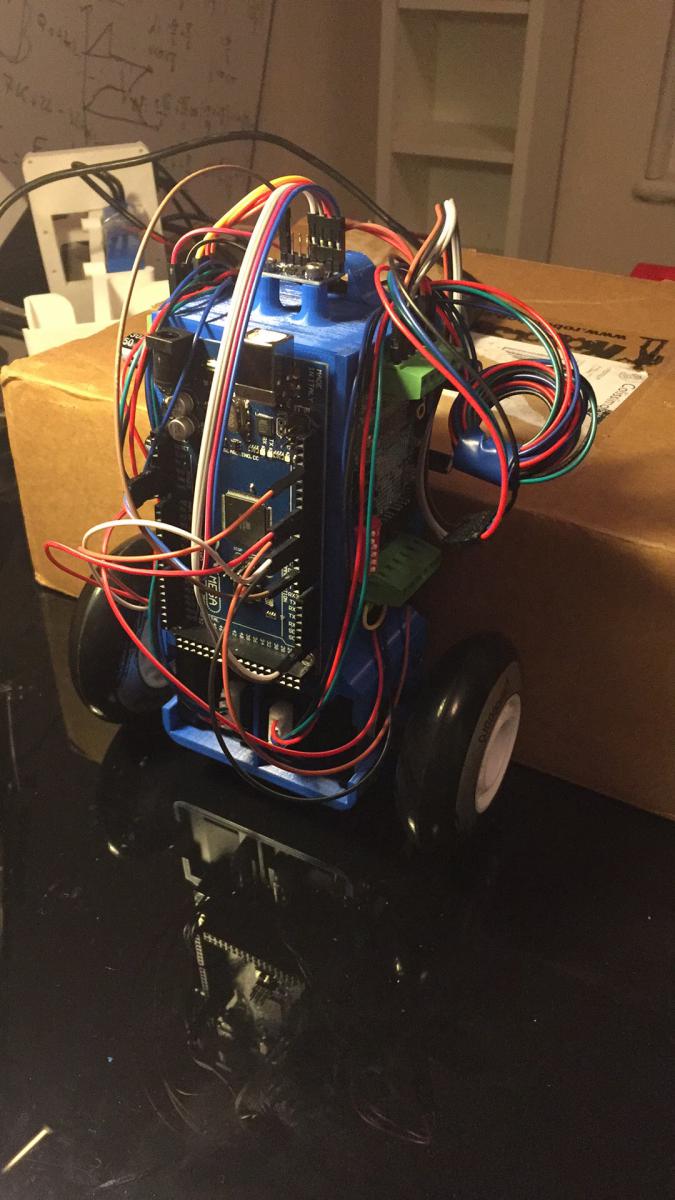
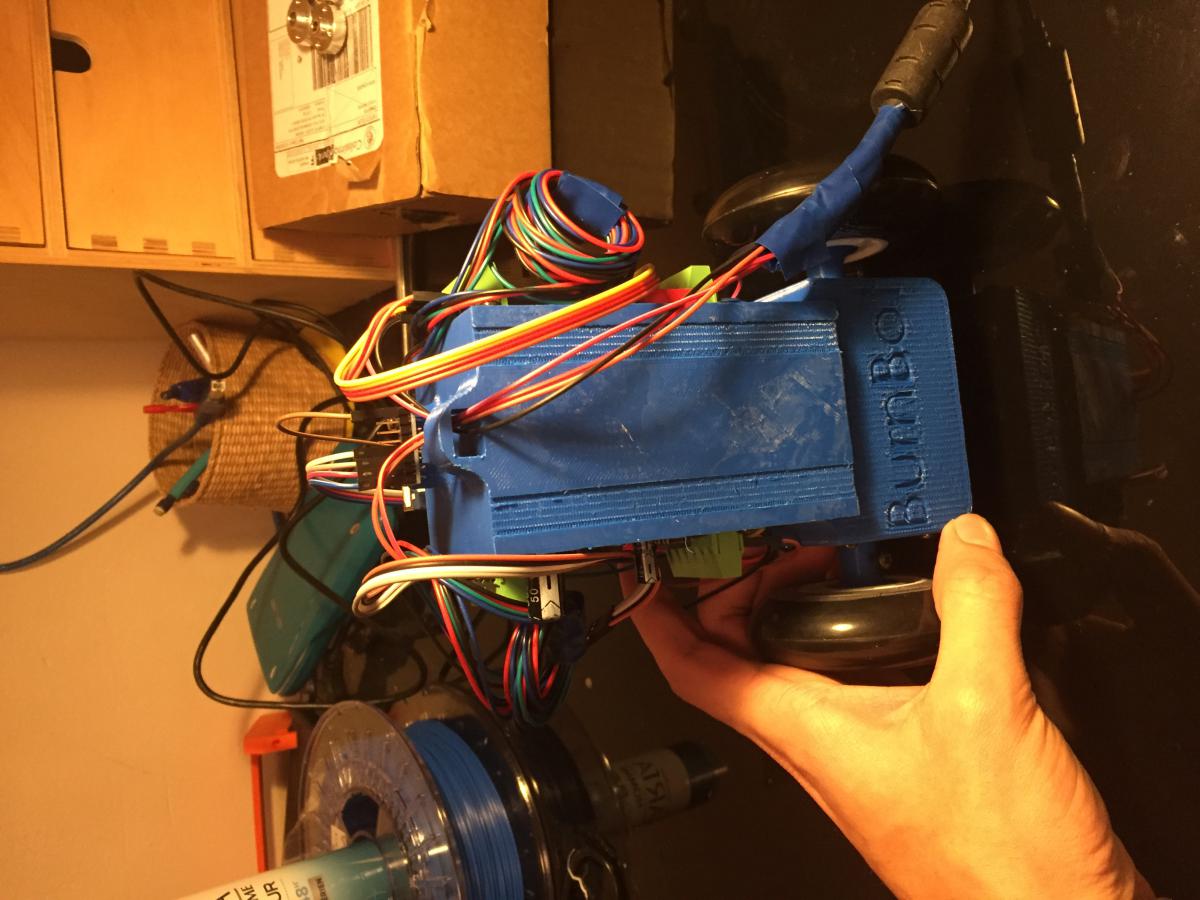
La méca et lélectronique sont enfin finis !!! Javais optimisé mon chassis pour mettre le centre de gravité le plus à laxe possible et ca a bien payé, le robot tiens quasiment tout seul à l'équilibre. Il est super compact, je nai plus de problème de bras de levier trop important, jadore son design il est super 
Je lai fais avancé (en le tenant) jusquà 3000 step/sec (bien que je ne pense pas que la vitesse soit bonne parce que ca fait du 150tr/sec !! Mais bon dapres Arduino cest bon ) et il adhère super bien au sol et il ny a aucun saut de pas !!
En plus je crois avoir enfin compris comment complètement asservir le robot grâce à 3 PID imbriqués : un pour langle, lautre pour la vitesse et un dernier pour la différence de vitesse entre les deux roues. Je vous ferais un schéma mais je vais deja moccuper de le faire tenir en equilibre avant de le faire rester sur place et sans tourner sur lui même
Encore beaucoup de travail mais je suis trop enthousiaste !
Je lai fais avancé (en le tenant) jusquà 3000 step/sec (bien que je ne pense pas que la vitesse soit bonne parce que ca fait du 150tr/sec !! Mais bon dapres Arduino cest bon
) et il adhère super bien au sol et il ny a aucun saut de pas !!En plus je crois avoir enfin compris comment complètement asservir le robot grâce à 3 PID imbriqués : un pour langle, lautre pour la vitesse et un dernier pour la différence de vitesse entre les deux roues. Je vous ferais un schéma mais je vais deja moccuper de le faire tenir en equilibre avant de le faire rester sur place et sans tourner sur lui même
Encore beaucoup de travail mais je suis trop enthousiaste !
Image(s) jointe(s)
#120
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 14 février 2018 - 07:04
Cela fait plaisir à voir ! Bravo !
J'attends avec impatience ton retour sur le PID.
J'attends avec impatience ton retour sur le PID.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Répondre à ce sujet









Aussi étiqueté avec au moins un de ces mots-clés : balancing, equilibre, pas à pas

1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users

