Ok, j'ai compris.
Bon pour la suite du projet va falloir que chacun fasse une salade sur la dropbox avec textes explicatif en image et avec schémas si possible de tout ce qu'il a fait et que l'ont fasse un mix réfléchit.
Je trouve que l'ont manque un peut de dialogue.  />
/>
Par contre j'aimerais bien mettre un pic pour la gestion PWM de la carte de puissance, MAIS je n'y connais rien dans le monde ENORME des pics. Si vous auriez quelques astuces pour savoir comment bien choisir son pic en fonction de ses besoins ça m'aiderais.
Salut !
Donc moi je me remet enfin un peu sur le projet !

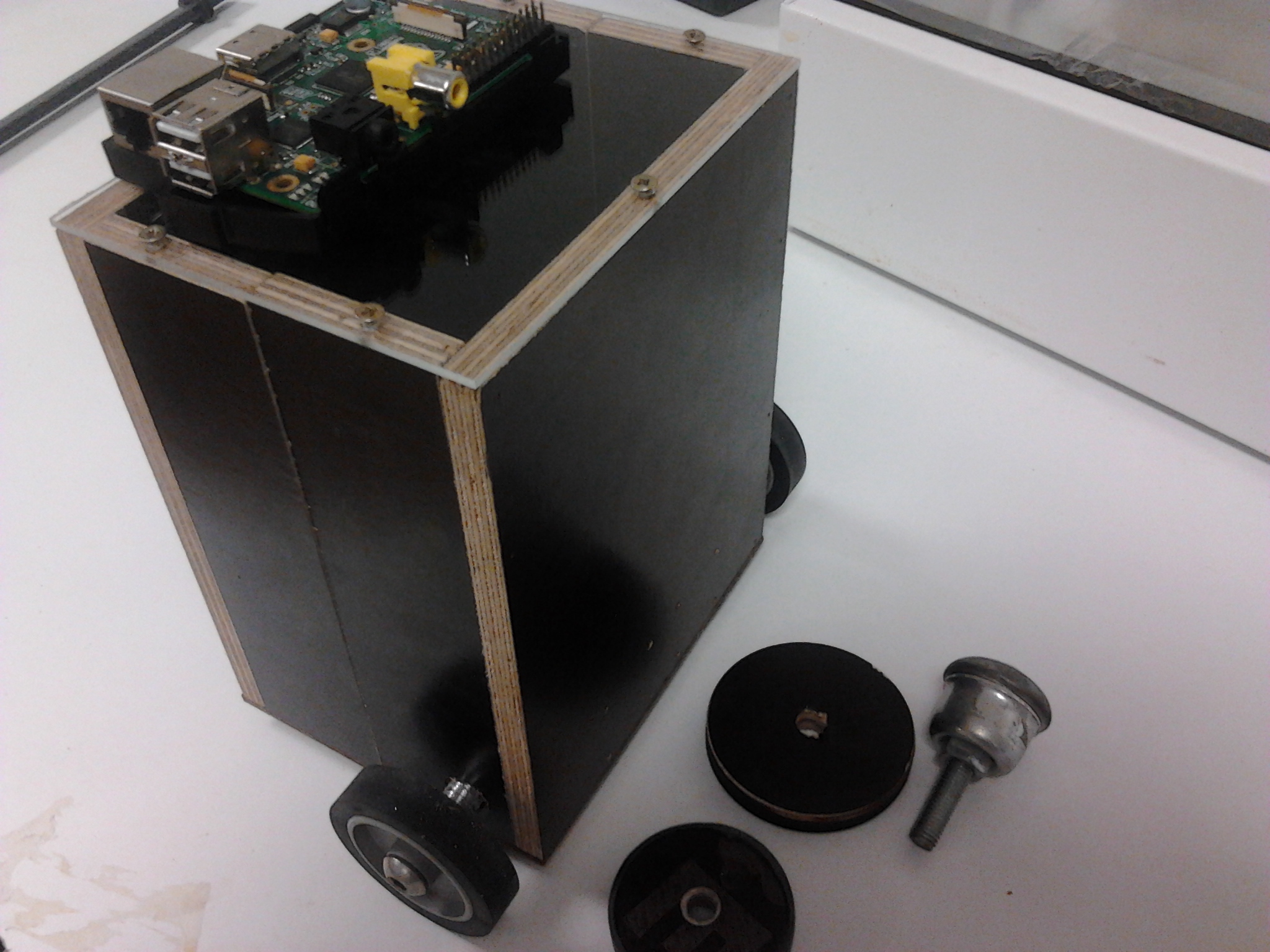
En ce moment j'ai fais quelque teste de carte d'alim, de commande I2C avec les pic avec prise de la raspberry pi en wifi via putty.
Tout ça pour dire que de l'I2C à 3.3V avec des pic en 5V ça marche très bien et que 5V ça marche bien avec des servo.
En ce moment j'ai :
-Une carte d'alim qui permet d'alimenter la raspberry, j'ai le TSR450 q( Régulateur à découpage 5V 1A qui est bien est suffisant pour la pi ) mais j'ai fais une autre carte avec un LM2576 ( 5V 3A ) qui coute en plus moins cher et qui marche bien aussi ( en prenant par contre un peu plus de place )
-un module I2C pour 3 servos: Tu le branche sur la même baytterie que la Pi + les 2 câble I2C. ( + un reset optionnel )
J'envisage de faire un module I2C pour écran LCD suivant le même principe et peut être un module 7 segment... à voir si c'est intéressant.
J'ai un problème avec ma carte qui contient le L298 mais j'ai pas encore eu le temps de m'y penché sérieusement. Par contre aucun problème avec le MCP23017.
Pour mes teste en ce moment je met la pi sur un hexapode et je commande pas par pas via le wifi les pas des deux premiers pattes ( 4 servo) de l'hexapode. ( j'ai pas encore fais les autre carte de l'hexa mais bien que ça marche je vois que j'ai des truc à revoir. )
J'ai vais commencer par refaire une carte d'alim pour la pi utilisant le LM2576, qui ne sera valable que si on utilise des batterie entre 6V et 50V.
Ensuite pour les fonctions de la cartes d'alim:
Voilà ce que je propose :
Prise pour batterie couplée à un bouton qui permet de tout couper.
Série de prises 5V 3A pour alimanter la pi + différents truc. ( deuxième pi, ou pont en H ... )
Un prise permettant de relier la batterie en passant par un relais et qui peut être couper via un second interrupteur sans éteindre la Pi. ( prise sur laquelle on peut brancher nos moteurs et autres.)
un voyant qui est orange si on a Allumer l'inter général mais coupé l'interrupteur lié au relais, vert quand les deux interrupteurs sont bons et rouge si on a plus de 5V au niveau des prise 5V 3A ( tout va mal si on est dans ce cas là )
Je peux aussi proposer sur cette carte une alim 5V 3A avec des prise spéciale pour des servo ... Là je demande votre avis.
Si vous avez d'autres suggestions n'hésitez pas !
Cette carte sera faite pile poil au dimension de la pi un peu comme la précédente que j'ai faite mais en amélioré.
Par contre je pense que cette fois ci je vais faire cette carte pour se mettre sous la Pi plutôt que dessus ...
Comme ça on laisse la place au dessus de la pi pour placer une carte qui se connecte directement sur les ports GPIO.
Si vous voulez participer lisez ceci et que vous voulez participez au projet à défaut de pouvoir réellement faire quelque chose n'hésitez surtout pas à donner vos idées histoire que les cartes faite soient vraiment faite pour et par un peu tout le monde. Résonnez en termes de fonctions ! Que voulez vous que la carte d'alim fasse ? Quel voyant quel indication , un bip si décharge de batterie ? une coupure automatique réglable ? un protection contre les inversions de polarité ? Et si vous avez d'autres idées de module n'hésitez pas à en faire de votre côté ! Si l'I2C en 5V marche avec des pic, ça doit aussi marcher avec un arduino ! N'hésitez pas à développer de modules en arduino aussi !
Perso je fais aussi du C sur la raspberry avec wiring pi, mais tout ce que je fais en C peut aussi bien être fais en Python aussi . N'hésitez pas à faire la même chose en python, si on arrive à rendre la même config matériel aussi bien accessible en C qu'en python, avec des arduino ou des pic, sous linu ou sous windows ( non non j'oublis pas mac
) là on aura gagné !
On ne va pas tous faire la carte moteur, la carte capteur US ou autre mais on peut tous faire des briques que nous assemblerons alors les uns avec les autres !
( d'ailleurs en parlant de python , il manque pas un fichier Char.LCD ? car j'ai voulu m'inspirer de la structure de code du LCD pour le faire en C sur la pi et ça n'a pas marché ! )
Au passage, si vous voulez je peux faire quelques cartes et vous en evoyer si vous voulez pour équiper vos pi et d'ailleurs si on est au moins 10 je peux faire une vrai pré série toute propre pour la carte d'alim !
Voilà tout ça pour dire que je profite pas mal de tous les projets que je mène pour aussi expérimenter pour notre robot même si j'ai pas été particulièrement actif ces derniers temps ^^ ( beaucoup de boulot !
)
Pour finir pour répondre à la question de melmet sur le pic, si tu veux un tout petit pic ( un dip8 je te suggère le 12F1840, si tu veux un gros pic type dip40 je te suggère le 16F1939.
C'est pour le moment les refs que j'utilise le plus ( avec le 16F887 mais qui est un peut moins bien que le 1939 )
Pour les caractéristique faut regarder la fréquence max à laquelles ils tournent, voir le nombre de timer, etc... je te suggère de passe par ce site :
http://www.microchip.com/maps/microcontroller.aspxSi tu peux essais de commander des samples chez microchip. Moi maintenant ça marche plus =/




/>
/>