

 Mon contenu
Mon contenu Homme
Homme




Pour ceux que ça intéresserait : quelqu'un s'est lancé dans "presque" le même projet (mais avance beaucoup plus vite) sur Thingiverse :
https://www.thingive...m/thing:2934890
Et moi pendant ce temps la je cherche comment assurer l'étanchéité...
 Posté par
- 18 septembre 2022 - 10:06
Posté par
- 18 septembre 2022 - 10:06
Pour ceux que ça intéresserait : quelqu'un s'est lancé dans "presque" le même projet (mais avance beaucoup plus vite) sur Thingiverse :
https://www.thingive...m/thing:2934890
Et moi pendant ce temps la je cherche comment assurer l'étanchéité...
Posté par
- 15 mai 2022 - 05:40
J'ai fait les essais d'étanchéité ce week-end et j'ai trouvé au moins 3 endroits où ça fuit :
- la jonction entre le hublot et le bouchon sur lequel il est monté;
- le joint du bouchon sur lequel est monté le hublot à l'avant;
- le joint du bouchon d'un des petits tuyaux (prévus pour contenir du lest).
Pour essayer de régler le problème je vais remplacer les joints des bouchons par des plus épais et je vais chercher un truc pour étanchéifier le hublot. La bonne nouvelle c'est qu'il n'y a aucune fuite au niveau des passages de câbles 
Posté par
- 13 mai 2022 - 08:17
Mais non !
Il existe des ESC bidirectionnels. En gros cela fonctionne comme un servo à rotations continus.
Voici 2 liens :
Merci pour les liens. Le problème n'est pas de trouver la pièce, c'est juste que le contrôleur que j'ai actuellement n'a pas la fonctionnalité. Je l'avais choisi à l'époque car il avait l'énorme avantage de rassembler 4 ESC en un seul. C'est beaucoup plus compact (et propre) pour faciliter le montage. Mais si je fais une V2 dans quelques temps, assurément je considèrerais l'achat d'ESC avec la fonction reverse.
Posté par
- 11 mai 2022 - 07:18
Alors que mes congés approchent de leur fin, LYS approche de la complétude. La première version du code est quasi-terminée (faut dire que y'avait pas grand chose à faire). Donc la Raspberry stream un flux vidéo de sa caméra, lisible avec VLC sur un autre ordinateur, et reçoit les commandes d'un autre PC. Les commande sont assez simple :
- 'z' pour avancer ;
- 'q' pour tourner à gauche ;
- ''d pour tourner à droite ;
- 'w' pour descendre ;
- 'a' pour remonter.
Reste à programmer l'Arduino pour qu'elle transforme les commandes Serial en PWM (facile) et à faire en sorte que la Raspberry envoie les commandes qu'elle reçoit vers l'Arduino (ce qui peut me prendre entre 30 s et 6000 ans selon l'état de la fonctionnalité, je hais la Raspberry pour toutes ces conneries d'implémentation).
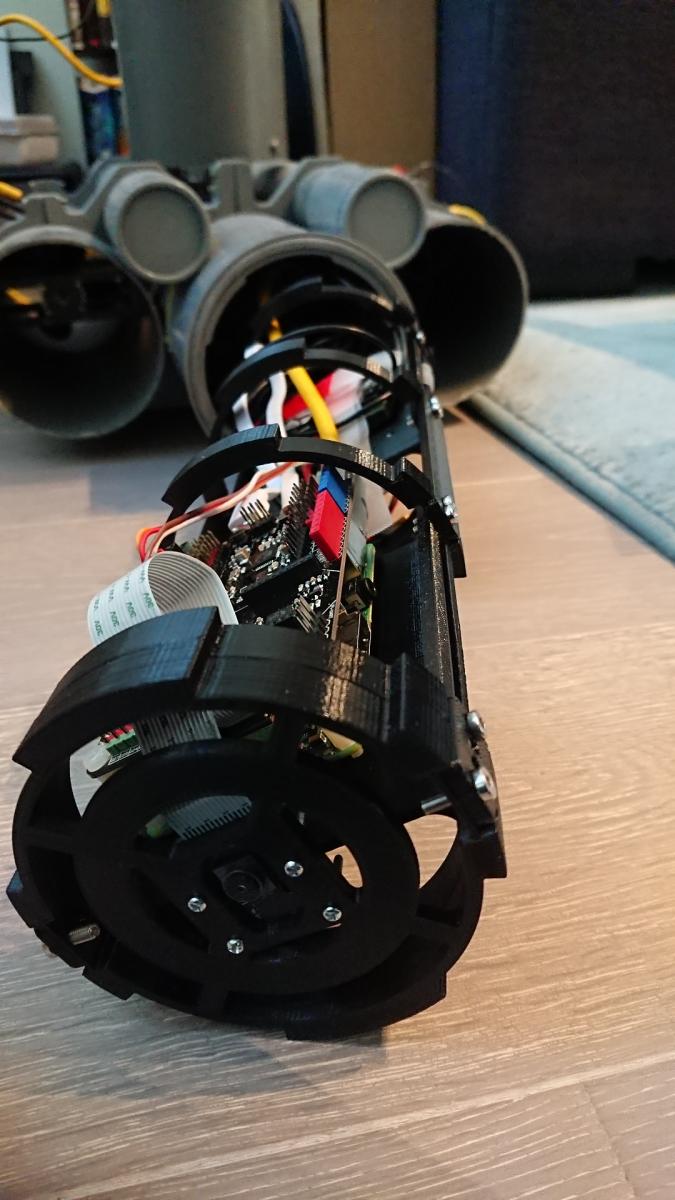
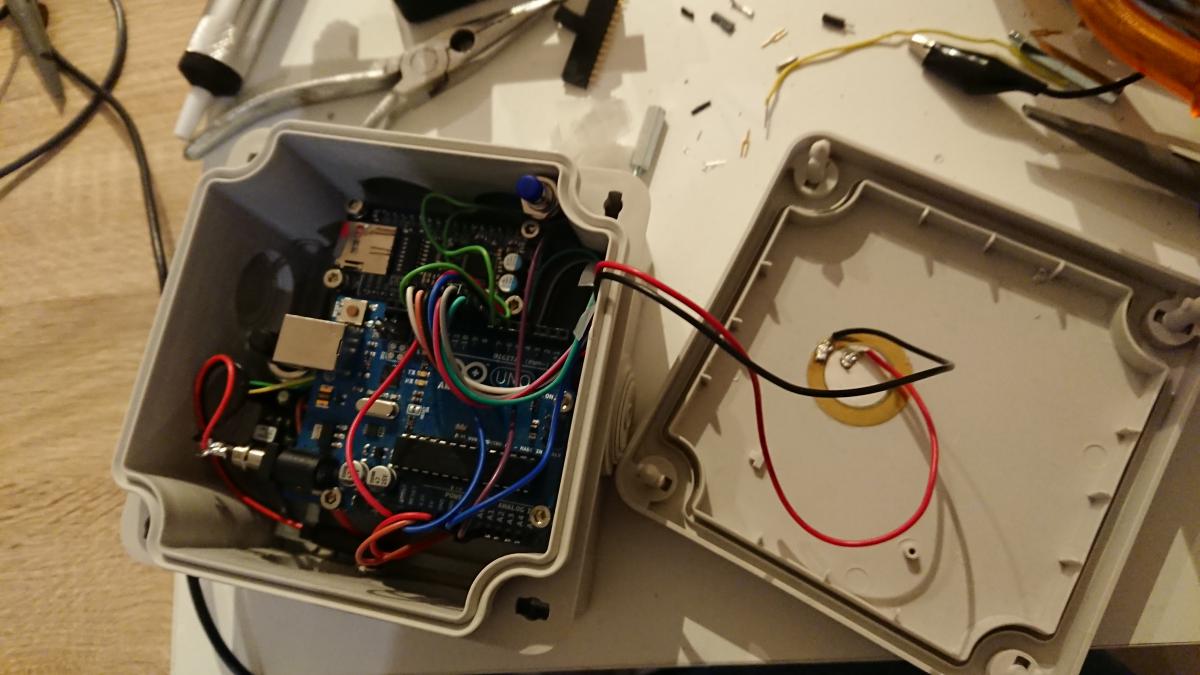
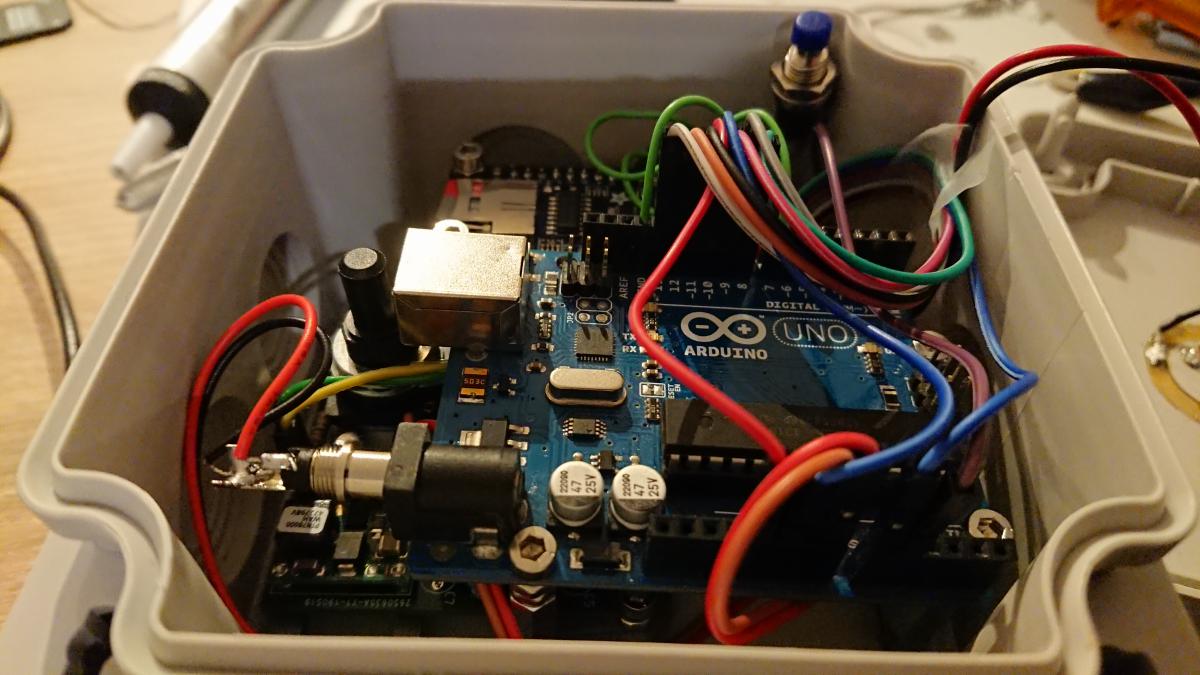
Je vous laisse avec une photo de LYS sur son banc de programmation au pied de mon bureau.

Posté par
- 06 mai 2022 - 02:20
Quelques péripéties personnelles ne m'ont pas permis de tester l'étanchéité du sous-marin, c'est donc repoussé à un futur proche. En attendant j'ai fini l'extérieur (collage d'un hublot en plexiglas sur la cloison avant) et l'intérieur : design et impression des supports pour la caméra, la Raspberry Pi, le contrôleur moteur...
Le résultat en image :

Les supports après impression et assemblage, il manquait encore les différentes barres de liaisons
Voici l'assemblage final

Une vue d'ensemble avant les essais d'installation (pour vérifier que l'électronique ne prend pas trop de place par rapport à la batterie)

C'est bon tout ferme !
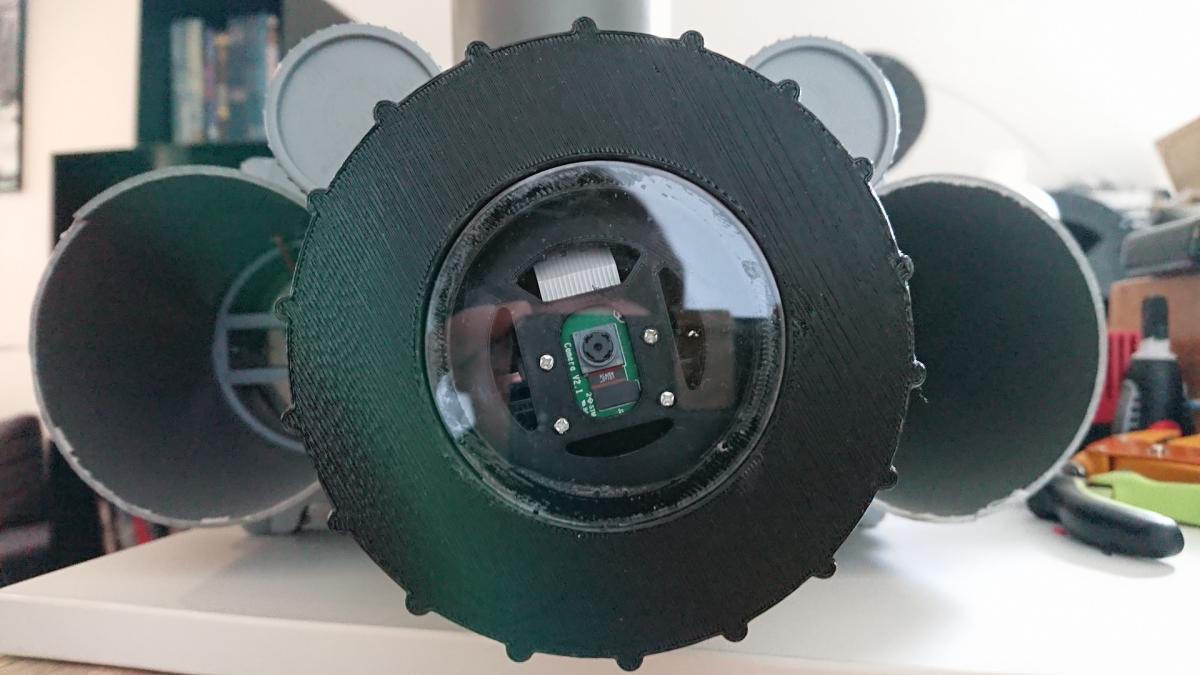
Coucou ! (c'est pas droit, je sais j'arrangerai ça plus tard)
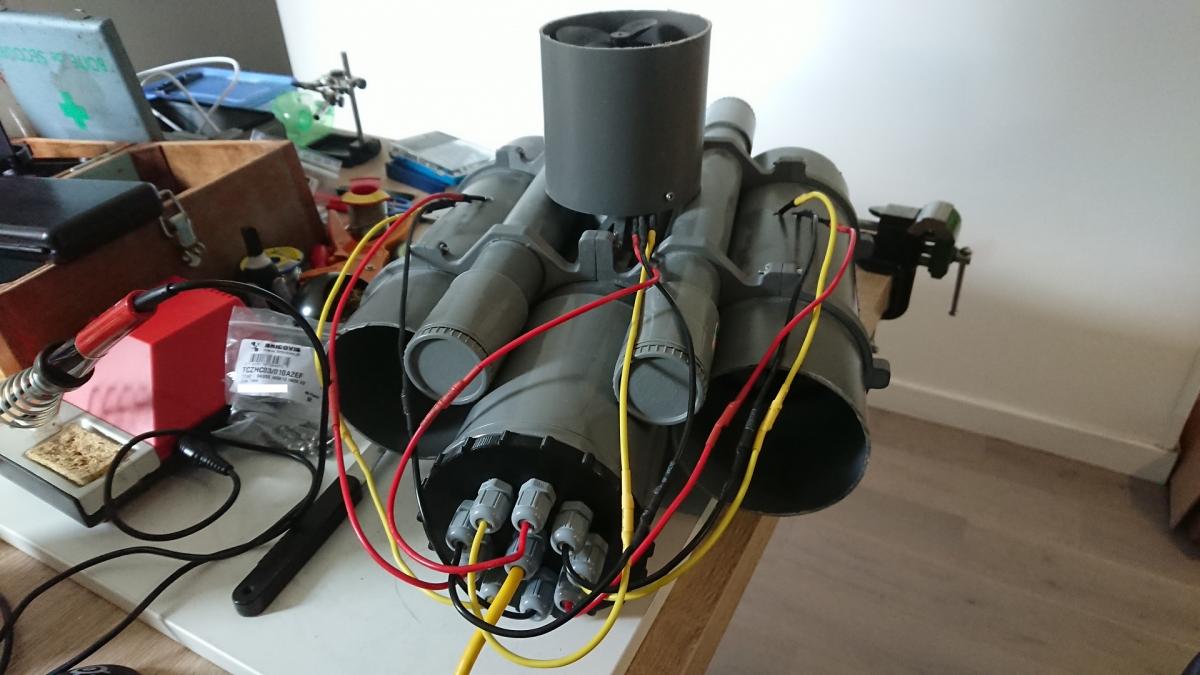
Vu de l'arrière
Le cerveau du sous-marin est constitué d'une Raspberry Pi 3 B+ (pour assurer la liaison Ethernet avec la surface et encoder la vidéo) avec un shield Arduino (de marque DFrobot) (pour gérer les PWM à envoyer au contrôleur des moteurs et éventuellement s'interfacer avec les capteurs si j'en ajoute). Un contrôleur de moteurs pour quadcopter est connecté à une batterie LiPo 4S et assure le contrôle des moteurs (seulement 3 moteurs sont utilisés) et la fourniture d'un rail d'alimentation 5.2 V, 3A pour la Raspberry Pi. La caméra est la V2 de la caméra pour Raspberry Pi.
Maintenant que la mécanique est provisoirement terminée (en attendant les résultats des essais d'étanchéité), il faut que je m'attaque à la programmation. Encore un semaine de vacances à y consacrer, je tiens le bon bout.
Posté par
- 15 mars 2022 - 07:47
Après une grosse baisse de motivation, j'ai enfin retrouvé le courage de m'y remettre.
La coque est quasiment terminée : plutôt que de faire les nombreux perçages dans la cloison arrière de la coque (l'étape à laquelle je m'étais arrêté faute d'arriver à percer avec suffisamment de précision), j'ai dessiné une pièce en 3D, imprimée en PETG.

Idem pour l'avant. Le trou sera bientôt comblé par un morceau de plexiglas transparent au travers duquel la caméra filmera.

Si vous vous souvenez bien il était prévu de faire tourner les moteurs directement dans l'eau. C'est toujours prévu comme ça pour les premiers essais mais je compte faire une mise à jour rapide vers des moteurs en "pods" étanches.
L'objectif est une première plongée en "vraie" pour le mois d'août. Premiers essais en statique dans 2 semaines dans la baignoire puis en dynamique dans la piscine d'un pote (s'il est d'accord )
Posté par
- 24 avril 2021 - 12:26
Bonjour,
J'ai acheté il y a 3 ans une imprimante 3D de marque Prusa, une i3 Mk2S. Jusqu'à présent je n'avais jamais eu de problème sérieux avec (rien que quelques petits ajustements ne pouvaient régler) mais ce matin c'est la Bérézina : j'ai foiré toutes mes impressions sauf une qui est en cours et qui se passe bien (elle a passé la première couche donc ça devrait bien se passer pour la suite).
En cause : la première couche qui semble avoir du mal à adhérer au lit d'impression. En particulier c'est le filament qui sert à délimiter les contours de la forme à imprimer qui n'adhère pas ou très mal au plateau, le remplissage qui a lieu après semble mieux se passer. J'ai aussi les extrémités des pièces que j'essaye d'imprimer qui se décollent pendant l'impression : généralement c'est ce qui fait que l'impression foire complètement car inévitablement la buse finit par arracher la partie qui rebique.
Voici ce que j'ai fait pour essayer de résoudre le problème:
- nettoyer le plateau. Maintenant il est propre mais ça ne fonctionne pas mieux.
- diminuer de 20% la vitesse d'impression ==> en effet l'imprimante semble aller beaucoup plus vite lorsqu'elle trace les contours que lorsqu'elle passe au remplissage. Je pense jouer encore plus avec ce paramètre pour voir si cela aide mais 20% n'ont pas suffit.
- J'ai refait ma calibration en Z (sait-on jamais ?) et j'ai remarqué que le réglage précis du Z avait besoin d'être modifié (je suis passé de -0.57 à -0.6)*. Malheureusement cela ne règle pas mes problèmes.
La pièce que j'essaye d'imprimer a été imprimée avec succès il y a deux jours (gcode identique), je n'avais alors eu aucun problème. Entre temps j'ai changé ma bobine de filament (même filament qu'avant, j'ai juste remplacé la bobine vide par une pleine : j'utilise du Colorfab PLA eco silver).
Si vous avez des idées pour m'aider je vous en remercie par avance.
* : est-ce qu'il est possible que cette différence puisse venir de l'usure de la buse. Auquel cas est-ce que mon problème pourrait venir de la ?
Posté par
- 25 avril 2020 - 01:31
Quand tu dis que ça marches plutôt bien, tu veux dire que tu as toujours un peu de "HUM"?
Sinon, pour filtrer "mieux" :
- quand tu veux faire passer du courant, un filtre LC est parfois mieux (en continue, l'inductance à une résistance casi nulle, mais elle ne laisse pas passer les hautes fréquences)
- parfois, tu n'es même pas obligé de faire un vrai filtre RC, parfois juste mettre le condensateur suffit pour stabiliser l'alimentation (en profitant des résistances et inductances parasites). A noter que c'est "moins bien" qu'un vrai filtre RC en terme de filtrage (mais plus simple). A noter que dans ce cas le condensateur doit être au plus près de l'endroit où tu veux stabiliser la tension.
- rajouter un condensateur en parallèle de l'ampli pourrait aider si tu as encore un peu de HUM
- je vois que tu mets des gros condensateurs (100µF) : il peut être utile d'en mettre un petit (genre un céramique 0.1µF) en parallèle pour les hautes fréquences. Mais comme le bruit que tu entends est basse fréquence, je pense pas que ça changera quelque chose
C'est quasiment inaudible mais j'ai maintenant un signal de 41 Hz qui se balade. Ce n'est pas très gênant, je pense que je vais m'en accommoder, après tout je ne cherche pas à faire de la haute fidélité.
Je vais essayer le condensateur en // de l'ampli.
Merci à tous pour vos réponses.
Posté par
- 25 avril 2020 - 10:24
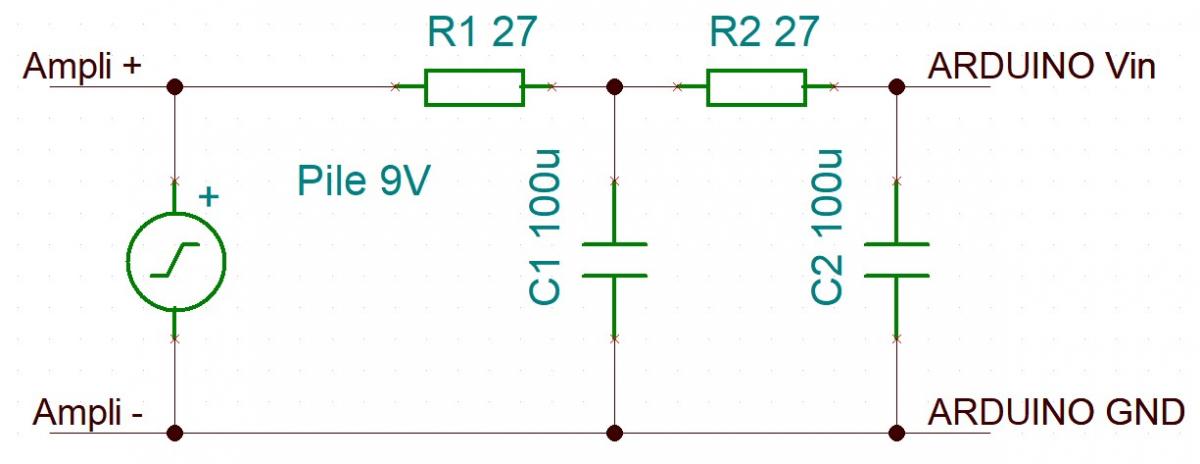
J'ai essayé avec un LM317 et ce montage ci (mais sans les diodes de protection, je n'en ai pas en stock, ni les mêmes résistances j'ai mis R1=1.8K et R2=4.7K. La tension mesuré sur l'entrée +5V est de 4.7V) :
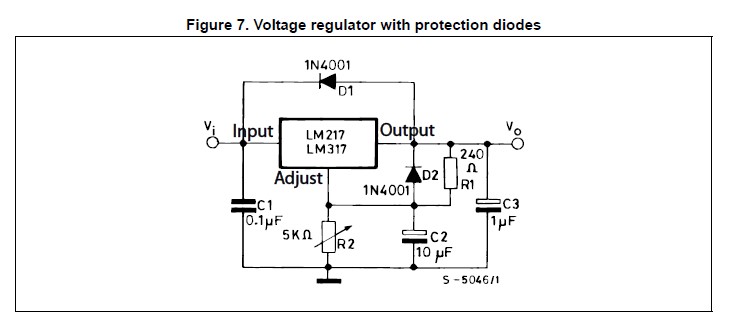
Et j'ai toujours le "hum" bien présent. Il n'apparait que en charge : lorsque j'observe à l'oscilloscope la tension d'alimentation de l'amplificateur elle est impec, l'oscillation n'apparait que lorsque l'Arduino est connecté via l'entrée 5V.
Je me dis que le plus simple c'est sans doute de recourir à 2 batteries 9V mais ça ne me plaît pas plus que cela comme solution. (j'aimais bien l'idée d'une seul source de courant, ça permettait de le brancher sur secteur).
EDIT : j'ai essayé de filtrer, avec des filtres RC, l'entrée de l'amplificateur mais la tension chutait trop dans les résistances et n'était pas suffisante pour alimenter l'ampli après. J'ai donc filtré l'entrée Vin de l'Arduino et la ça marche plutôt bien :
Si vous voyez une meilleur solution n'hésitez pas.
Posté par
- 13 janvier 2020 - 10:08
Projet fini !
J'ai cherché pendant longtemps pourquoi j'avais des "trous" dans les enregistrements pour finalement réaliser que l'ogg n'est pas le format le mieux standardisé (3 softwares essayés, pas un qui lit la même chose que l'autre dans mon enregistrement de test). En revanche une fois converti en wav aucun problème.
Plus qu'à aller à la mer enregistrer quelque chose d'intéressant !
Posté par
- 06 janvier 2020 - 09:12
Je trouve ton projet très intéressant. Pourrais tu partager le schéma de la partie filtrage/amplification avant numérisation s'il te plaît ?
Posté par
- 26 août 2019 - 07:14
J'ai fini par réussir, non sans avoir perdu patience plus d'une fois... C'est cette vidéo qui m'a le plus aidé au final :
Merci à tous pour vos réponses.
Posté par
- 28 juillet 2019 - 12:03
Ça à l'air complexe :
https://commons.wiki...umbered_165.png
Est-ce qu'un joint SPI ne suffit pas ? (chez 123roulements y'en a dans des tailles adaptées et pas trop cher si je veux essayer pour plus tard).
 )
)

{kind=link}