Mon contenu
Mon contenu Not Telling
Not Telling






 Posté par
Posté par Bonjour,
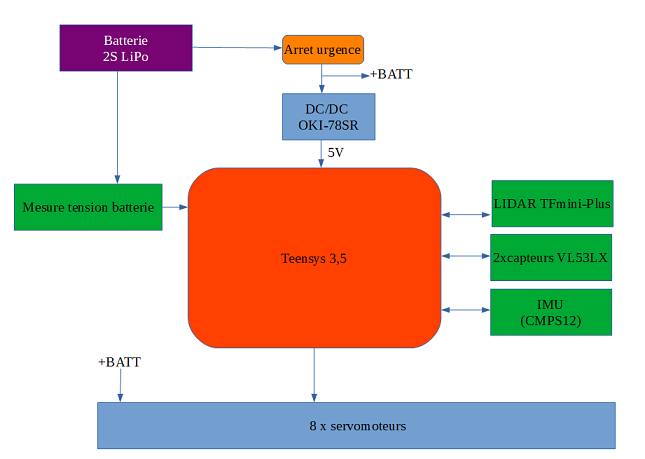
J'ai réalisé une nouvelle structure en pmma 3 mm pour le robot puis des pieds en impression 3D. De plus la structure des pattes est modifiée pour gagner en rigidité. Une carte électronique de contrôle avec un microcontrôleur est aussi en cours de conception afin de remplacer la carte de prototypage veroboard.