Mon contenu
Mon contenu Homme
Homme






 Posté par
Posté par Salut,
Es-ce que tu as déjà essayer d'afficher simplement du texte ?
J'avais écris ce programme pour un futur tuto (j'utilise cette bibliothèque: https://bitbucket.or...ystal_1.3.4.zip )
//Bibliothèques :
#include "Wire.h"
#include "LiquidCrystal_I2C.h"
//Ecran LCD :
LiquidCrystal_I2C lcd(0x3F, 2, 1 , 0, 4, 5, 6, 7, 3, POSITIVE); //Seul le premier paramètre, l'adresse I2C de l'écran, est à modifier
void setup()
{
//Initialisation :
lcd.begin(16,2); //16 caractères par ligne sur 2 lignes
lcd.backlight(); //Allume le rétro-éclairage, lcd.noBacklight() permet de l'éteindre
lcd.print("Hello"); //Ecrit Hello
lcd.setCursor(0,1); //Se place sur au premier caractère de la seconde ligne
lcd.print("Robot-maker"); //Ecrit Robot-maker
}
void loop() {}
- Mike118 aime ceci

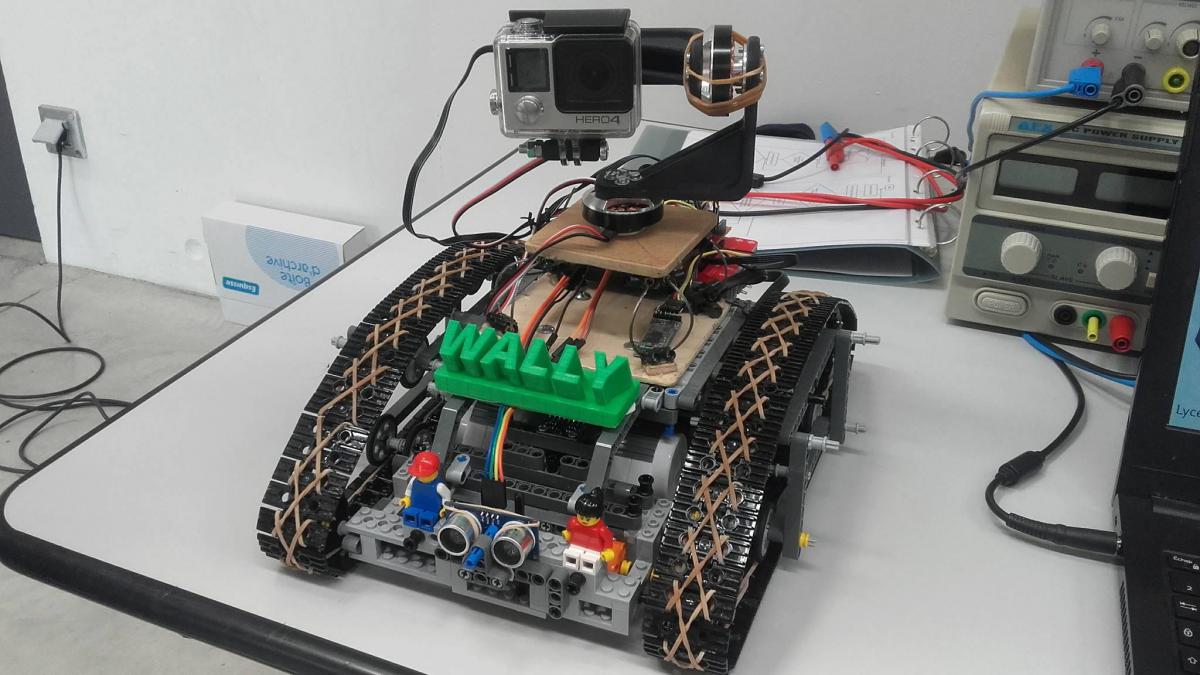









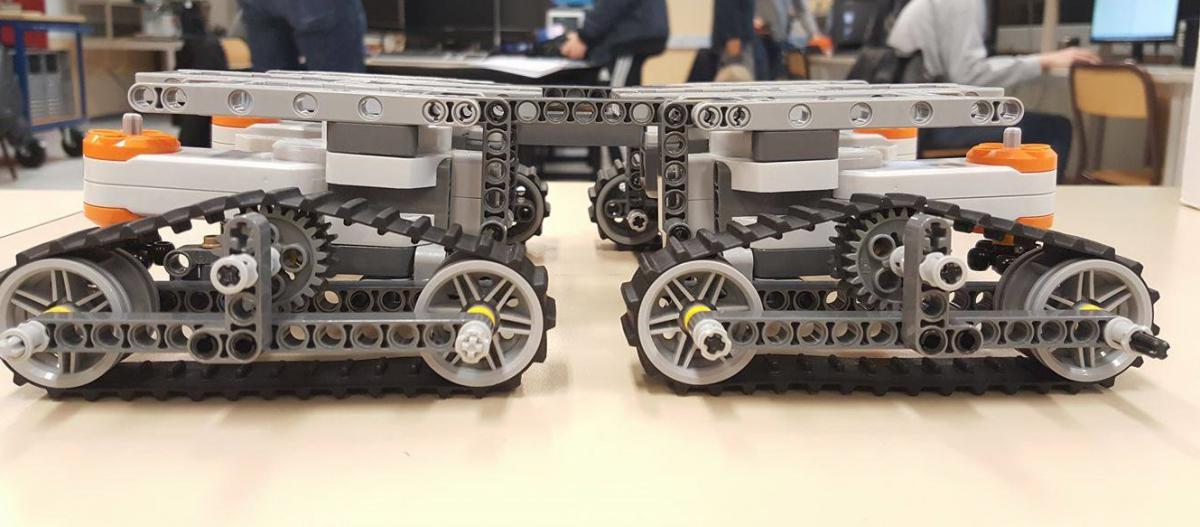
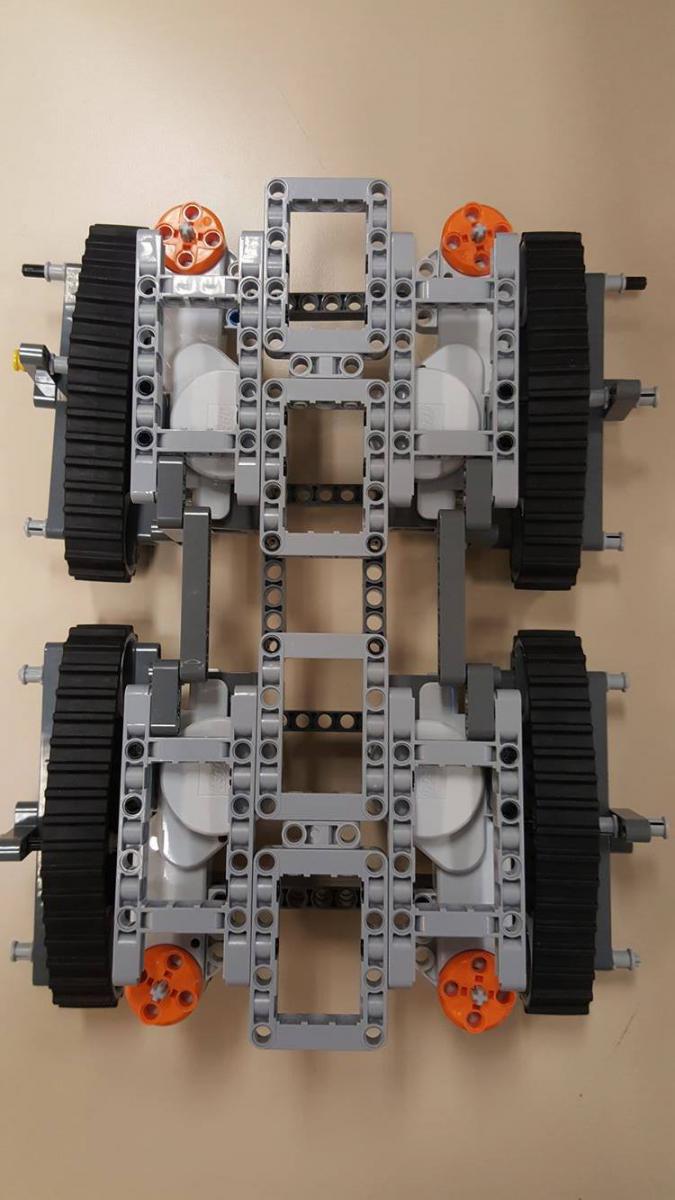
 avec la présentation de notre (nous sommes un groupe de 5) projet de terminale SI.
avec la présentation de notre (nous sommes un groupe de 5) projet de terminale SI.