

 Mon contenu
Mon contenu Homme
Homme






 Posté par
Posté par Pour rebondir sur le message d'Oracid, j'ai une Canon EOS M10 avec un objectif Canon EF-M 15-45mm f/3.5-6.3 IS STM, le tout acheté d'occasion à moins de 200€ sur MPB (il y a 2 ans avec une promo).
Les gros plus sont la taille du capteur (pour la faible luminosité), la possibilité de tourner l'écran vers soi et de changer l'objectif. J'ai un objectif macro, TTartisan 40mm f/2.8 Macro pour EOS M, qui est très pratique pour les vues de PCB entre autres.
De mon côté, cet appareil photo est bien meilleur que mon téléphone Redmi Note, mais si ton téléphone (ou ta webcam) est déjà de bonne qualité, c'est amplement suffisant pour débuter.
La différence de qualité entre une très bonne caméra et une caméra correcte ne justifie pas la différence de prix pour un débutant, un micro correct, un éclairage adapté et un minimum de post-traitement de la vidéo sera déjà bien plus utile à mon avis.
 Quelques petits trucs que je pourrais présenter ici un de ces jours, mais rien en particulier pour le moment. Par contre, si je vais à Toulouse, j'espère ne pas venir les mains vides
Quelques petits trucs que je pourrais présenter ici un de ces jours, mais rien en particulier pour le moment. Par contre, si je vais à Toulouse, j'espère ne pas venir les mains vides  Et oui ça fait déjà 8 ans depuis l'inscription !
Et oui ça fait déjà 8 ans depuis l'inscription !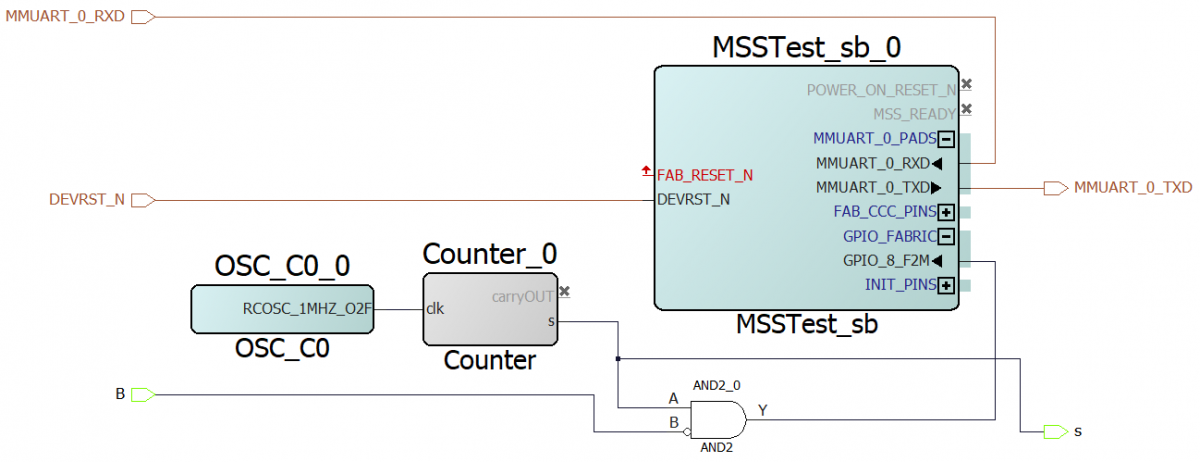

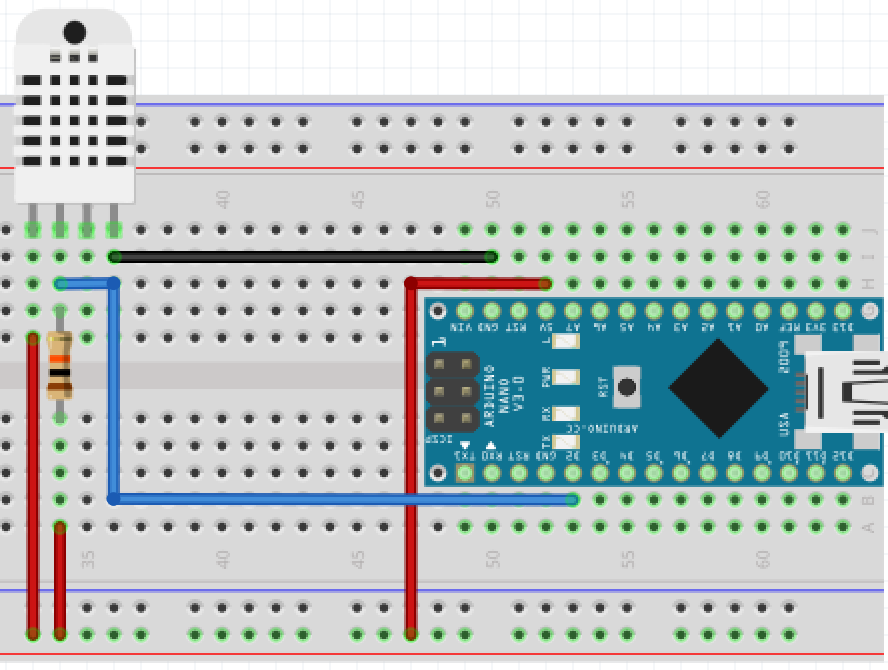
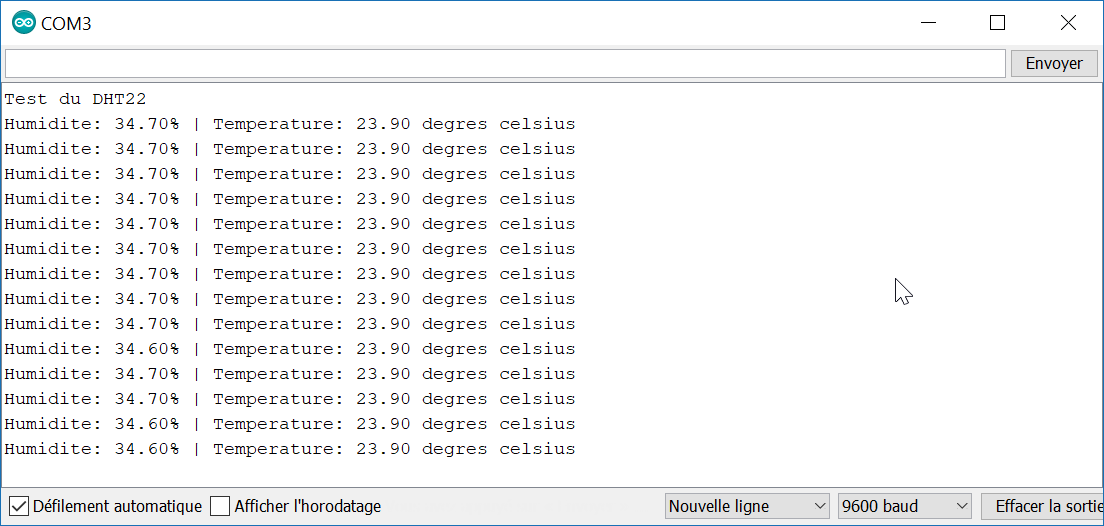
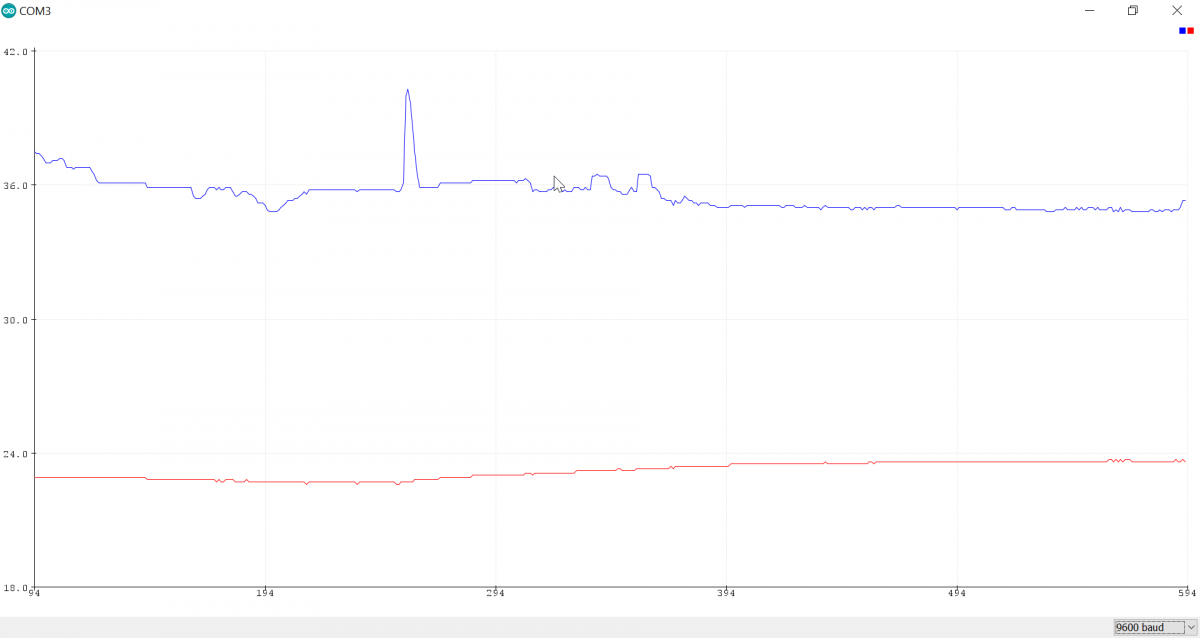
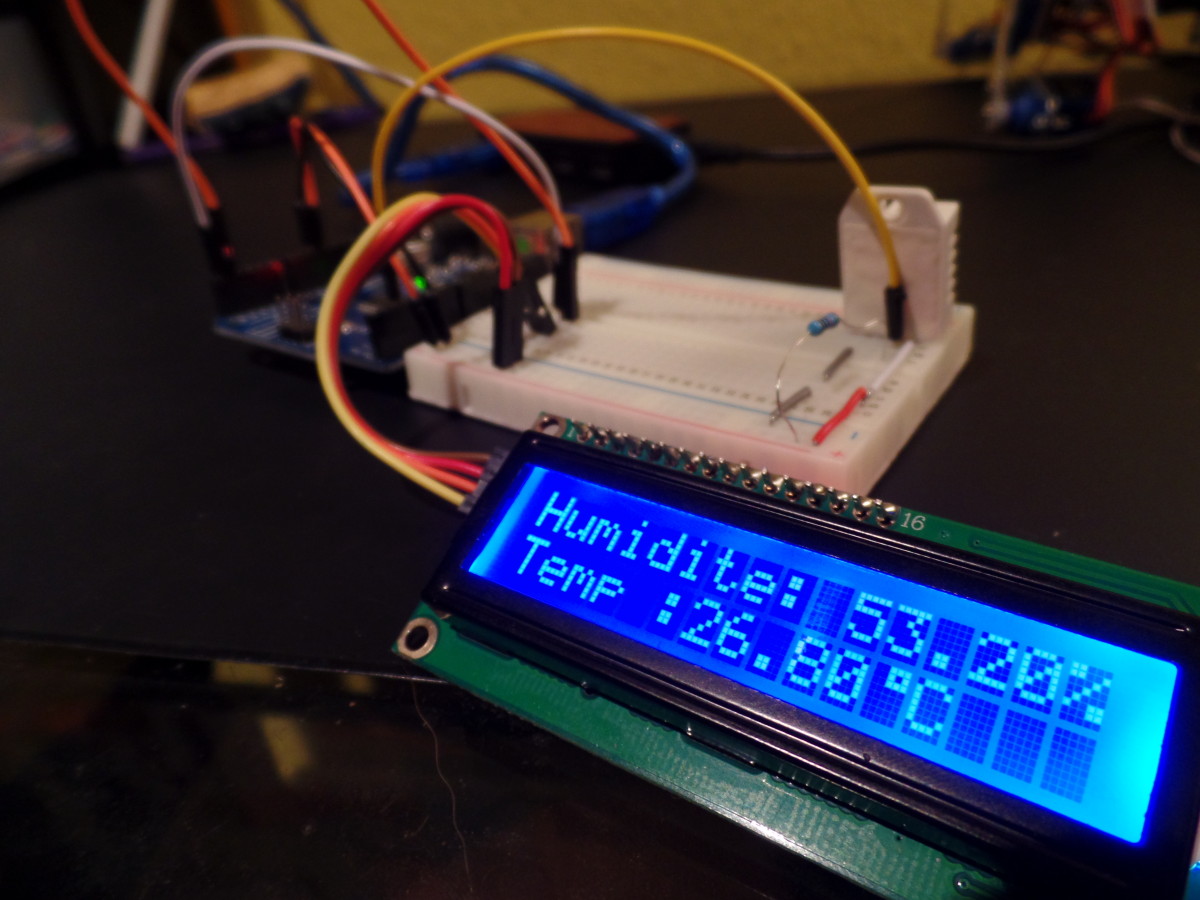
 Le programme de cet essai est disponible
Le programme de cet essai est disponible 

 )
)


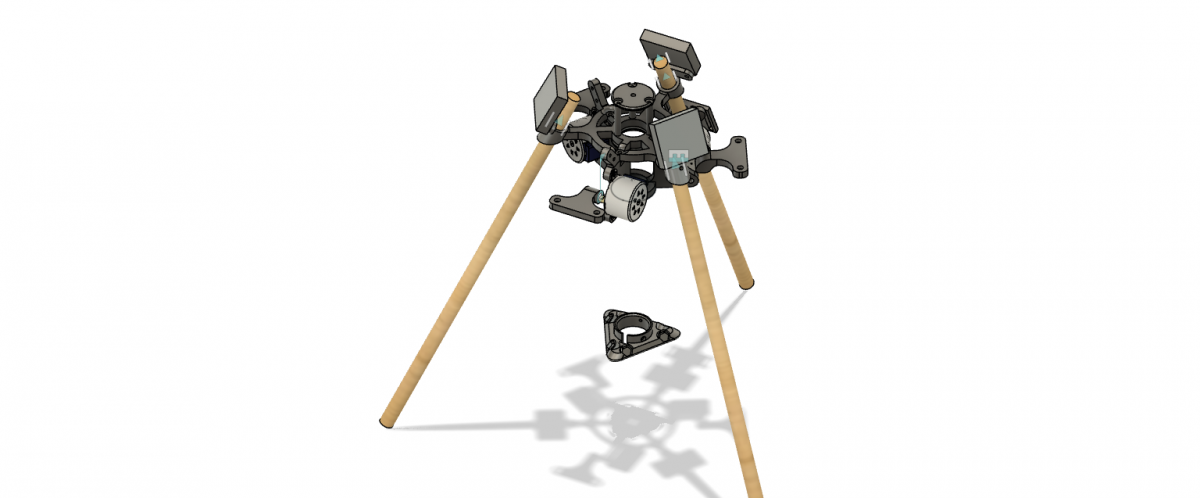
 ) et très curieux de découvrir comment fonctionner tout ce qui m'entourait et en particulier tout ce qui volait (et j'avais un ami passionné de programmation). Avant de venir ici je voulais construire un robot volant comme j'avais pu certain en construire (comme celui de
) et très curieux de découvrir comment fonctionner tout ce qui m'entourait et en particulier tout ce qui volait (et j'avais un ami passionné de programmation). Avant de venir ici je voulais construire un robot volant comme j'avais pu certain en construire (comme celui de 



