Mon contenu
Mon contenu Not Telling
Not Telling
 Posté par
Posté par
Le jeu de dé annonçait bien quelque chose, un compte à rebours vers un dernier post pour vous communiquer mon départ du forum.
J'ai besoin de plus d'espace et d'indépendance.
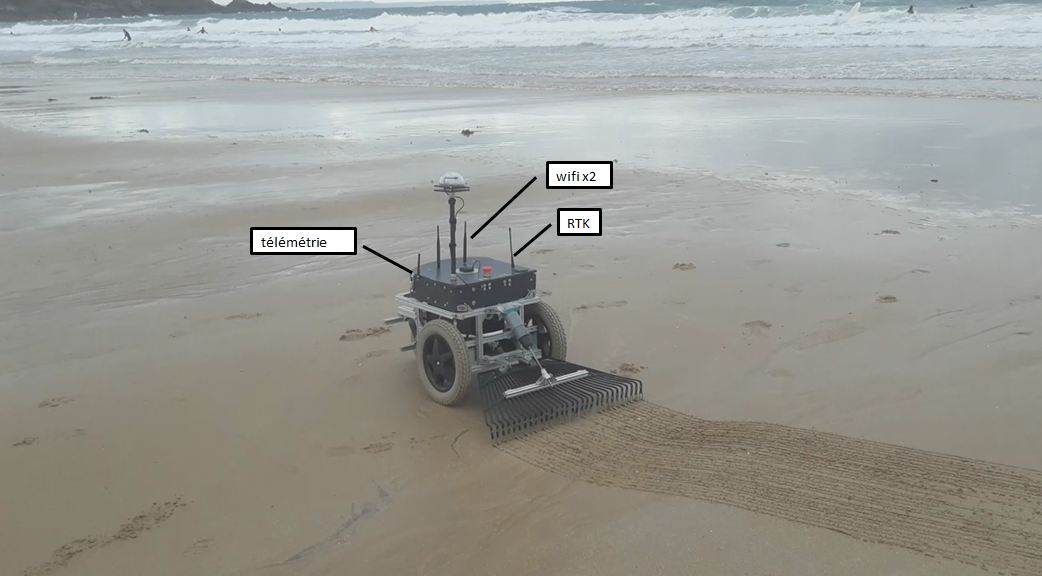
Tout est éphémère. Pablo dessine, la mer efface ses traces, nous sommes là et nous passons.
Pablo est en voie d'achèvement et son odyssée ne fait que commencer. On le verra de plus en plus sur les plages. Peut-être vais-je mettre en ligne un petit site pour décrire ses activités mais techniquement je ne communique plus. Ceux qui le voudrons bien sauront le trouver en cherchant un peu.
Ha... j'entends les vagues se rapprocher. Alignez les chopines sur le comptoir du bistro, le vilain canard impertinent est parti.
ps : je ne réagirai pas en MP non plus
- pmdd aime ceci